DOI: 10.11817/j.issn.1672-7207.2017.08.014
电驱动铰接车本身质量偏置对转向操稳性的影响
黄夏旭,司吉祥,杨珏,张文明,申焱华
(北京科技大学 机械工程学院,北京,100083)
摘要:根据电驱动铰接式自卸车的结构特点,提出一种考虑车身侧倾和质心偏置情况下的车辆运动模型,通过计算其稳态转向过程中的横摆角速度增益、侧倾角增益以及不足转向系数来建立横摆角速度与侧倾角的理论关系,论述前、后车体质心偏置对车辆操纵稳定性的影响。研究结果表明:分析计算和试验验证的结果基本吻合;铰接式车辆以不同车速稳态转向时横摆角速度与侧倾角呈现出一种抛物线关系,且前、后车体质心偏置对车辆转向过程中的操纵稳定性有着不同的影响规律,该研究可为铰接式车辆操纵稳定性的综合控制提供理论参考。
关键词:铰接式车辆;横摆角速度;侧倾角;质心偏置
中图分类号:U461.6 文献标志码:A 文章编号:1672-7207(2017)10-2657-08
Effects of mass offset on steering handing stability for electric-driven articulated truck
HUANG Xiaxu, SI Jixiang, YANG Jue, ZHANG Wenming, SHEN Yanhua
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: A roll and centroid offset steering kinematics model was presented according to the electric-driven articulated vehicle structural characteristics. The theoretic relationship between the yaw rate and roll angle steady-state value was established and the centroid position offset to the handling stability effects in steering conditions was discussed by calculating the yaw rate gain, roll angle gain and understeer parameter. The results show that analysis and test results are basically consistent when the articulated vehicle is steering at different speeds; the relationship between the yaw rate and roll angle is a complex nonlinear. And the centroid offset has different influence on the articulated vehicle handling stability. It provides a theoretical reference for the integrated control of articulated vehicle handling stability.
Key words: articulated vehicle; yaw rate; roll angle; centroid offset
随着国内外大型露天矿山规模的不断扩大,铰接式电动轮自卸车在露天矿山的运输设备中起着举足轻重的作用。铰接式电驱动车辆的前后车体通过铰接体连接,并采用发动机和发电机直接串联的模式代替了原有的传动结构[1-5]。文献[6-7]通过简化铰接式车辆的动力学系统,仿真分析了结构参数对车辆直线行驶操纵稳定性的影响;文献[8]对铰接式车辆动力学稳定性存在的问题及研究现状进行了分析,指出可利用电子控制系统对铰接车动力学稳定性进行控制;文献[9]通过建立转向角输入和车体绝对横摆角速度输出的传递函数,总结出前后车体不同转向类型组合对整车的稳态转向特性的影响。本文作者结合电驱动铰接式车辆的结构特点,以某型60 t六轮铰接式电动轮自卸车为研究对象,建立考虑车身侧倾和质心偏置情况下的车辆运动模型,对其稳态转向过程中横摆角速度与侧倾角的理论关系进行研究,并论述前、后车体质心偏置对车辆转向过程中的横摆角速度、侧倾角和不足转向系数的影响。对比计算结果和试验结果,验证模型求解的正确性与准确性。
1 车辆转向运动的数学模型
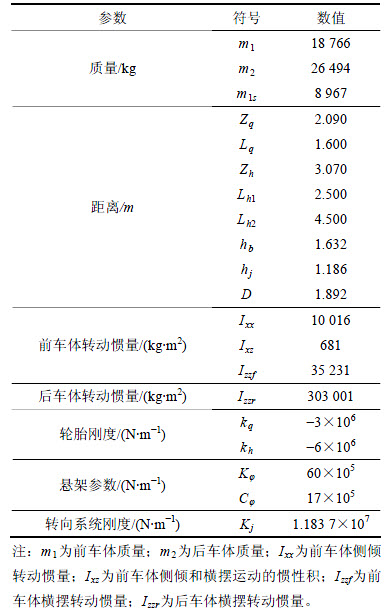
60 t铰接式电动轮自卸车的前车体采用单纵臂式油气独立悬架,前车体的侧倾中心位于前车体纵向对称平面与地平面的交线上。后车体悬架没有设置弹性阻尼元件,因此,不考虑后车体簧载质量的侧倾运动。图1所示为铰接式车辆的平面运动模型。图1中:g1Og2为车辆运动的绝对坐标系;a1O1a2为前车体质心位置处的坐标系;b1O2b2为后车体质心位置处的坐标系;u1,v1和r1为前车体质心纵向速度,侧向速度和横摆角速度;u2,v2和r2为后车体质心纵向速度,侧向速度和横摆角速度;T为转向力矩;Fx和Fy为铰接点处相互作用力;δ为前后车体折弯角;α为铰接车航向角;Fxi和Fyi分别为各轮的纵向力和侧向力;Zq为前车体质心距铰接点距离;Zh为后车体质心距铰接点距离;Lq为前轴到铰接点距离;Lh1为中间轮到铰接点的距离;Lh2为后轮到铰接点的距离;D为前后车体轮距的一半;Pq和Ph为前后车体质心偏置的距离。
图2所示为前车体侧倾模型,规定车身逆时针侧倾转动时,其侧倾角速度为正。图2中:hb为前车体质心距侧倾中心的距离;hj为铰接点距侧倾中心的距离;φ为车身的侧倾角。
1.1 轮胎的侧偏力及转向力矩
铰接式车辆由于油量或装载情况的变化等原因会使车辆前、后车体质心本身存在左右偏置,车辆载荷在左、右车轮上的分配将发生变化。而在车辆转向过程中,离心力的作用同样会导致轮胎产生载荷转移。由文献[10]可计算出车辆以30 km/h,最小转弯半径转向的情况下,质心本身偏置引起的轮胎载荷变化量为
 (1)
(1)
式中:m1s为前车体簧载质量;m1x为前车体非簧载质量;R为转弯半径;v为转向车速;ΔF为载荷转移量;h1为侧倾中心高度;h2为非簧载质量的质心高度;Kφ为侧倾角刚度系数。
结合表1中给出的作业研究对象车辆的结构参数,经计算可得:质心本身偏置引起的轮胎载荷变化量为离心力导致的载荷变化量(2 854.3 N)的5倍以上;随着转弯半径的增大,离心力对轮胎载荷变化量的影响逐渐减小。由于铰接式车辆的转弯车速较低,本文暂不考虑离心力引起的载荷转移。
由轮胎的侧偏特性可知:轮胎的侧偏刚度与它的垂直载荷有关[11-12]。本文中设质心未发生偏置时前轴轮胎侧偏刚度为kq,后轴轮胎侧偏刚度为kh。而前车体质心本身存在偏置时,前轴左轮承担的载荷为原载荷的λ1倍,前轴左轮轮胎侧偏刚度变为λq1kq,右轮轮胎侧偏刚度为λq2kq。因此,前轴轮胎的侧偏力为
 ;
; (2)
(2)
式中:λq1和λq2分别为前轮胎的侧、偏刚度系数。
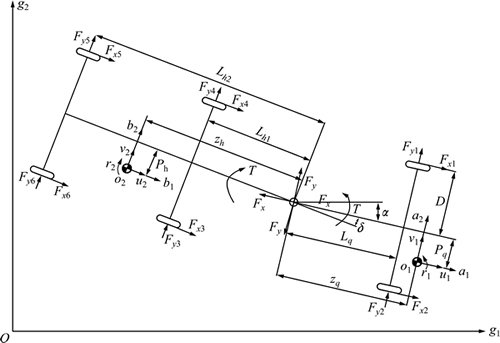
图1 车辆平面运动模型
Fig. 1 Yaw plane model of articulated vehicle
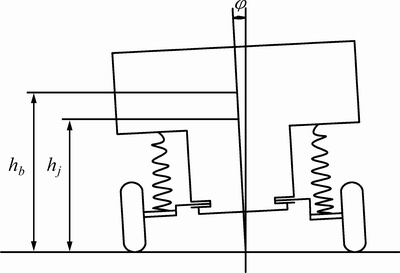
图2 前车体侧倾模型
Fig. 2 Roll model of front vehicle body
表1 铰接车结构参数
Table 1 Structure parameters of articulated vehicle
当后车体质心本身存在偏置时,后轴左轮承担的载荷为原载荷的λ2倍。后轴左轮轮胎侧偏刚度变为λh1kh,右轮轮胎侧偏刚度为λh2kh。因此,后轴轮胎的侧偏力为
 ;
; (3)
(3)
式中:λh1和λh2分别为后轮胎的侧、偏刚度系数。
为简化研究,本文中假设车辆小角度转向,由于前后车体的折弯角较小,因此,可取sinδ=δ,cosδ=1。各轮胎的侧偏角如下:
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中:βi为第i号轮胎的侧偏角。
铰接式车辆直线或沿一固定半径的曲线行驶时,转向阀关闭,此时液压转向系统相当于1个作用于铰接点、连接前后车体的扭转弹簧[13-15],其当量扭转弹簧刚度为kj。设转向盘输入角造成的前后车体的折转角为δw,由于油液可压缩性和传动机构的弹性等,车体实际折转角δ与δw间存在微小增量。根据可压缩性流体流量连续性方程,稳态转向的转向力矩为
 (7)
(7)
1.2 整车运动方程
为简化分析,对铰接式自卸车做如下假设:1) 车辆在水平面上运动,不考虑地面不平的影响;2) 忽略空气阻力;3) 忽略对运动影响不大的摩擦力,如前后车体铰接处的摩擦力矩等;4) 车身侧倾时,悬架仍表现为线性特性,悬架的侧倾角刚度系数Kφ和侧倾角阻尼系数Cφ均为常量。
系统的总动能和总势能均以系统变量的形式表示,将其代入拉格朗日方程,对其求偏导数,即可得到系统的运动方程。由式(2)~(7),结合系统的能量方程即可导出铰接车纵向速度u、侧向速度v、横摆角速度r和侧倾角φ的7个微分方程。
对前车体:
 (8)
(8)
 (9)
(9)

 (10)
(10)

 (11)
(11)
对后车体:

 (12)
(12)

 (13)
(13)



 (14)
(14)
铰接式车辆匀速行驶时,前后车体纵向加速度为0 m/s2,忽略左右轮纵向力的差别,水平路面上匀速行驶时全轮驱动车辆纵向力之和约等于零。则式(2)~(14)经整理,忽略各项间的微小乘积项可得
 (15)
(15)
式中: ;
; ;
; 。
。
2 稳态转向工况下横摆角速度与侧倾角的变化规律
铰接式车辆在稳态转向行驶时,即方向盘输入的折弯角δw恒定,该状态下车辆的前进速度和转向角等保持不变[16-18],即 ,因此,式(15)可转化为
,因此,式(15)可转化为
 (16)
(16)
根据克莱姆法则,对式(16)进行求解,得到稳态横摆角速度增益 :
:
 (17)
(17)

 (18)
(18)
 (19)
(19)
式中:m为整车质量;L为六轮铰接车的前后轴距;L12为前轮到中间轮的距离;L23为中间轮到后轮的距离;L13为前轮到后轮的距离;Lh为后轴距铰接点的距离;dq前车体质心距前轴的距离;dh为后车体质心距后轴的距离。
前、后车体质心位置不存在偏置时,轮胎的垂直载荷不变,即 ,刚性化铰接体,则转向系统的刚度
,刚性化铰接体,则转向系统的刚度 ,同时设前轴距为a,后轴距为b。因此,
,同时设前轴距为a,后轴距为b。因此,

 (20)
(20)
式中: ;
; ;a=
;a=  ;
; 。
。
本文中定义的轮胎的侧偏刚度为负数,式(20)形式与文献[11]中的公式相同,可证明K为考虑质心偏置和车身侧倾时铰接式车辆的不足转向系数。K为正时车辆为不足转向,为负时车辆为过多转向,为零时车辆为中性转向。
表1所示为60 t铰接式自卸车的结构参数。由表1可知:60 t铰接式自卸车在空载时的不足转向系数K=0.003 0,满载时K=0.001 1,均为不足转向,本文研究内容是基于车辆满载情况下。
由式(16)可得铰接式车辆转向过程中的稳态侧倾角增益 :
:

 (21)
(21)
由式(17)和(21)可求解铰接式车辆在稳态工况下横摆角速度与车身侧倾角稳态值的理论关系为
 (22)
(22)
3 铰接式车辆质心偏置对操纵稳定性的影响
前、后车体质心存在偏置时,车载质量将重新分配,导致车辆左、右轮胎垂直载荷发生变化。图3所示为某型60 t铰接式自卸车轮胎垂向载荷系数与侧偏刚度系数的实验数据拟合图。由图3可知:轮胎侧偏刚度随垂直载荷的变化是非线性的,当铰接式车辆前、后车体由于质心偏置,前、后轴一侧轮胎的垂直载荷系数在区间[0.70,1.30]变化时,对应轮胎侧偏刚度系数在区间[0.70,1.06]变化。
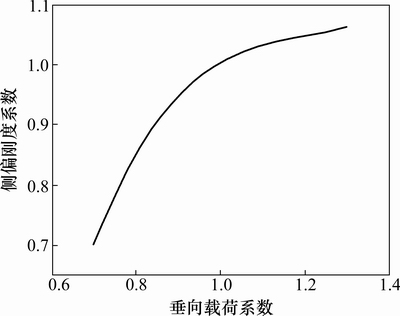
图3 轮胎侧偏刚度与其垂向载荷的关系
Fig. 3 Relationship between tire stiffness and its vertical load
3.1 质心偏置对横摆角速度的影响
由式(17)可得出铰接式车辆以不同车速稳态转向时,横摆角速度增益。图4所示为铰接式车辆在以0~60 km/h转向时,前、后车体质心偏置对横摆角速度增益的影响,其中曲线1反映前、后车体质心均存在的偏置,曲线2反映只有后车体质心存在的偏置,曲线3反映只有前车体质心存在的偏置,曲线4反映车辆前、后车体质心均未存在时的偏置。由图4中曲线1和2或曲线3和4对比结果可知:当铰接式车辆前车体的质心发生偏置时,车辆的稳态横摆角速度增益是下降的,而且这种趋势随着车速的增加而增加。

图4 质心偏置对横摆角速度的影响
Fig. 4 Effects of centroid offset on yaw rate
由图4中曲线1和3或曲线2和4对比结果可知:当铰接式车辆后车体质心发生偏置时,车辆的稳态横摆角速度增益是增加的,而且这种趋势随着车速的增加而增加。
由此可以得出:当铰接式车辆在稳定车速下以一固定铰接角转向时,前车体的质心偏置有利于降低车辆转向时的横摆角速度,而后车体的质心偏置将会增大转向过程中的横摆角速度。由图4可知:在车速为60 km/h时,对比铰接式车辆只有后车体质心存在偏置和只有前车体质心存在偏置时,可以得到前者比后者的横摆角速度增加了7.7%,而在车速较低时质心本身存在偏置对横摆角速度的影响较小。
3.2 质心偏置对侧倾角的影响
由式(21)可得出铰接式车辆以不同车速稳态转向时侧倾角增益。图5所示为铰接式车辆在以0~60 km/h转向时,前、后车体质心偏置对侧倾角增益的影响,其中曲线1反映前、后车体质心均存在的偏置,曲线2为只有后车体质心存在的偏置,曲线3反映只有前车体质心存在的偏置,曲线4反映车辆前、后车体质心均未存在时的偏置。由图5中曲线1和2或曲线3和4对比结果可知当铰接式车辆前车体的质心发生偏置时,车辆的侧倾角增益是下降的,而且这种趋势随着车速的增加而增加。
由图5中曲线1和3或曲线2和4对比结果可知:当铰接式车辆后车体质心发生偏置时,车辆的稳态侧倾角增益是减小的,而且这种趋势随着车速的增加而减小。
由此可以得出:当铰接式车辆在稳定车速下以一固定铰接角转向时,前、后车体质心偏置均会降低车辆转向过程中的侧倾角,但两者对侧倾角的影响趋势随车速的变化不同。由图5可知:当车速为60 km/h时,对比铰接式车辆前后车体质心均存在偏置和前后车体质心均未发生偏置时的2种情况,后者比前者的侧倾角增加了 。
。
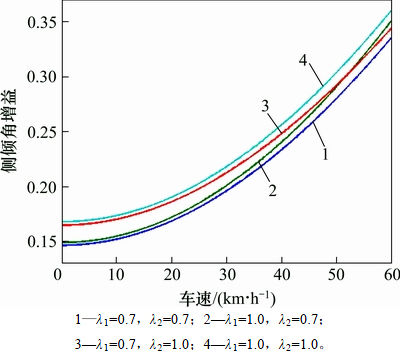
图5 质心偏置对侧倾角的影响
Fig. 5 Effects of centroid offset on roll angle
3.3 质心偏置对不足转向系数的影响
由式(18)可得出铰接式车辆在质心偏置情况下的不足转向系数。图6中曲线 所示为后车体质心位置不变的情况下,前车体质心偏置对不足转向系数的影响。图6中曲线
所示为后车体质心位置不变的情况下,前车体质心偏置对不足转向系数的影响。图6中曲线 所示为前车体质心位置不变的情况下,后车体质心偏置对不足转向系数的影响。由图6中曲线可知:当铰接式车辆前车体的质心发生偏置时,随着质心偏置距离变大即分配给左、右轮垂直载荷差别越大,车辆的不足转向系数越大,铰接式车辆趋于增加不足转向量。由图6中曲线对比结果可知:不足转向系数随着前车体质心偏置的增大而增加得越迅速。
所示为前车体质心位置不变的情况下,后车体质心偏置对不足转向系数的影响。由图6中曲线可知:当铰接式车辆前车体的质心发生偏置时,随着质心偏置距离变大即分配给左、右轮垂直载荷差别越大,车辆的不足转向系数越大,铰接式车辆趋于增加不足转向量。由图6中曲线对比结果可知:不足转向系数随着前车体质心偏置的增大而增加得越迅速。
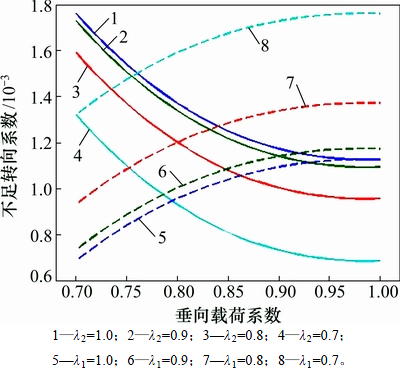
图6 质心偏置对不足转向系数的影响
Fig. 6 Effects of centroid offset on understeer parameter
由图6中曲线可知:当铰接式车辆后车体质心发生偏置时,随着质心偏置距离越大即分配给左、右轮垂直载荷差别越大,车辆的不足转向系数越小,铰接式车辆趋于减小不足转向量。由图6中曲线对比结果可知不足转向系数随着后车体质心偏置的增大而减小得越迅速。
由此可以得出:当铰接式车辆在稳定车速下以一固定铰接角转向时,前、后车体的质心偏置会引起车辆的不足转向量发生变化,且这种变化随着偏置量的增大越来越明显。由图6可知:在铰接式车辆前、后车体质心位置均不存在偏置时,车辆的不足转向系数K=0.001 1。前车体质心偏置导致前轴一侧车轮载荷系数λ1为0.7时,此时不足转向系数K=0.001 8,比质心未发生偏置时增加63.6%;后车体质心偏置导致后轴一侧车轮载荷系数λ2为0.7时,此时,不足转向系数K=0.000 687,比质心未发生偏置减小了37.5%,车辆接近中性转向,可见前、后车体质心位置的偏置对不足转向系数的影响很大。因此,铰接式车辆在设计制造过程中要尽量保证后车体的质心不发生偏置,同时在满足铰接式车辆其他使用性能的基础上,前车体质心适当的偏置可以提高其不足转向量以避免过多转向。
4 试验
为检验模型的正确性,对整车进行稳态转向试验。试验对象为某型60 t铰接式电动轮自卸车,在驾驶室地板安装惯导模块对车辆横摆角速度和侧倾角速度数据进行采集。惯导模块的型号为ADIS16445,该型惯导内置1个三轴陀螺仪和1个三轴加速度计。其中旋转速率的测试范围为±250°/s,精度为0.01°/s。角度传感器安装在前后车体中间的铰接体处,用来测量前后车体的相对转角。该角度传感器供电电压为24 V,测量范围为0°~135°,输出信号电流为4~20 mA或者电压为0~5 V。
由于矿区场地条件限制,在微风,较为平坦的路面上测试了车辆以小转角中低速行驶时的横摆角速度和侧倾角。试验分为10组,每一组车辆均由静止加速到各要求车速,然后转动方向盘保持铰接体转角不变,保持这一车速稳定行驶至少60 s,记录每一组的横摆角速度和侧倾角速度。对这些结果进行处理,求出车辆在稳定车速转向时的横摆角速度和侧倾角的平均值,其中车辆的侧倾角由侧倾角速度积分得到。
表2所示为车辆在稳定车速下横摆角速度与侧倾角。
图7所示为铰接式车辆以不同车速稳态转向时侧倾角和横摆角速度的计算结果与试验结果。由图7可知:随着转向车速增大,侧倾角与横摆角速度均不断增加,且两者的变化规律与试验曲线的整体变化趋势一致,两者的变化均呈一种抛物线关系,证明了本文理论的正确性。由于模型中忽略了地面不平的影响,以及对车辆质心位置及转动惯量等参数估计与实际存在误差,因此,仿真曲线的横摆角速度和侧倾角与试验值存在偏差。
表2 横摆角速度与侧倾角试验数据
Table 2 Test data of yaw rate and roll angle
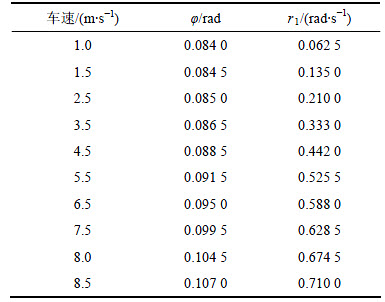
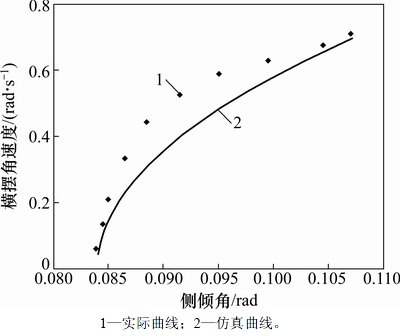
图7 不同车速下横摆角速度与侧倾角关系理论与试验对比
Fig. 7 Comparison of theory and experiment of yaw rate and roll angle under different vehicle speeds
5 结论
1) 铰接式车辆转向过程中的操纵稳定性不仅取决于车辆本身参数,而且取决于车辆转向时的车速、铰接角以及前、后车体质心偏置程度;而转向过程中铰接式车辆的横摆角速度与侧倾角也呈现出复杂的非线性关系。因此,可以利用这种关系通过调节悬架刚度和阻尼等参数来提高铰接式车辆不同工况下的操纵稳定性。
2) 铰接式车辆低速转向时前、后车体质心偏置对横摆角速度的影响很小,车速较高转向时前车体质心偏置有利于降低车辆的横摆角速度;前、后车体质心偏置均有利于减小车辆转向时的侧倾角,但两者对侧倾角的影响趋势随车速的变化不同;质心偏置对铰接式车辆的不足转向系数影响很大,其中前车体质心偏置会使铰接式车辆转向时不足转向量趋于增加,而后车体质心偏置比较危险,它会使铰接式车辆不足转向量趋于减小。
参考文献:
[1] ADAM R, LARS D, ANNIKA S T. Snaking stability of articulated frame steer vehicles with axle suspension[J]. Int J Heavy Vehicle Systems, 2010, 17(2): 31-42.
[2] 白艳, 贾鑫, 宗长富, 等. 汽车操纵稳定性客观评价方法综述[J]. 科学技术与工程, 2012, 12(6): 1339-1347.
BAI Yan, JIA Xin, ZONG Changfu, et al. Review of objective vehicle handling evaluation[J]. Science Technology and Engineering, 2012, 12(6): 1339-1347.
[3] 申焱华, 李艳红, 金纯. 电驱动铰接式工程车辆操纵稳定性控制分析[J]. 农业工程学报, 2013, 29(12): 71-76.
SHEN Yanhua, LI Yanhong, JIN Chun. Analysis of handling stability for electric-driven articulated truck[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(12): 71-76.
[4] CHEN L K, SHIEH Y A. Jackknife prevention for articulated vehicles using model reference adaptive control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2011, 225(1): 28-42.
[5] 刘宏飞, 许洪国, 关志伟, 等. 半挂汽车列车直线行驶横向摆振研究[J]. 汽车技术, 2005(1): 11-14.
LIU Hongfei, XU Hongguo, GUAN Zhiwei, et al. Study on shimmy of a semi-trailer combination vehicle driving on straight line[J]. Automobile Technology, 2005(1): 11-14.
[6] AZAD N L. Dynamic modeling and stability controller development for articulated steer vehicles[D]. Waterloo: University of Waterloo, 2006: 51-67.
[7] 葛强胜. 铰接式车辆高速直线行驶动态仿真[J]. 农业机械学报, 2003, 34(4): 39-42.
GE Qiangsheng. Simulation of high-speed and straight-line traveling dynamic characteristics of articulated vehicles[J]. Transactions of the Chinese Society of Agricultural Machinery, 2003, 34(4): 39-42.
[8] AZAD N L, KHAJEPOUR A, MCPHEE J. A survey of stability enhancement strategies for articulated steer vehicles[J]. Int J Heavy Vehicle Systems, 2009, 16(1/2): 26-48.
[9] 张杨, 刘昕晖. 铰接车体转向横摆稳定性[J]. 吉林大学学报(工学版), 2012, 42(2): 266-271.
ZHANG Yang, LIU Xinhu. Yaw stability for steering motion of articulated vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(2): 266-271.
[10] 王晓彬, 张庆军. 横向载荷转移下双前桥汽车操纵稳定性分析[J]. 农业装备与车辆工程, 2014, 52(11): 22-26.
WANG Xiaobin, ZHANG Qingjun. Handling stability analysis of dual-front-axle vehicle based on lateral load transfer[J]. Agricultural Equipment and Vehicle Engineering, 2014, 52(11): 22-26.
[11] 喻凡, 林逸. 汽车系统动力学[M]. 北京: 机械工业出版社, 2005: 58-68.
YU Fan, LIN Yi. Vehicle system dynamics[M]. Beijing: China Machine Press, 2005: 58-68.
[12] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009: 169-171.
YU Zhisheng. Automobile theory[M]. 5th ed. Beijing: China Machine Press, 2009: 169-171.
[13] 刘昕晖, 张杨. 铰接式工程机械车辆转向振摆现象分析[J]. 机床与液压, 2008, 36(3): 105-107.
LIU Xinhui, ZHANG Yang. Analysis for pressure fluctuations of the steering system of the articulated vehicle[J]. Machine Tool and Hydraulics, 2008, 36(3): 105-107.
[14] 杨忠炯, 何清华. 铰接车辆液压动力转向系统动态特性仿真[J]. 中南大学学报(自然科学版), 2004, 35(1): 80-85.
YANG Zhongjiong, HE Qinghua. Simulation of dynamic characteristics of hydraulic power steering system of articulated vehicles[J]. Journal of Central South University (Science and Technology), 2004, 35(1): 80-85.
[15] 高建明, 王同建, 徐进勇, 等. 铰接式装载机转向运动学动力学仿真与试验研究[J]. 建筑机械, 2006(4): 63-66.
GAO Jianming, WANG Tongjian, XU Jinyong, et al. Simulation and experiment research on steering kinematics and dynamics of articulated loaders[J]. International Construction China, 2006(4): 63-66.
[16] 汪建春, 刘旺. 铰接式车辆对扰动的瞬态和稳态响应(上)[J]. 矿山机械, 2008, 36(9): 26-29.
WANG Jianchun, LIU Wang. Transient and steady responses of articulated vehicle to disturbance moment(I)[J]. Mining and Processing Equipment, 2008, 36(9): 26-29.
[17] 汪建春, 刘旺. 铰接式车辆对扰动的瞬态和稳态响应(下)[J]. 矿山机械, 2008, 36(11): 35-39.
WANG Jianchun, LIU Wang. Transient and steady responses of articulated vehicle to disturbance moment(II)[J]. Mining and Processing Equipment, 2008, 36(11): 35-39.
[18] 喻凡, 李道飞. 车辆动力学集成控制综述[J]. 农业机械学报, 2008, 39(6): 1-6.
YU Fan, LI Daofei. Review on integrated vehicle dynamics control[J]. Transactions of the Chinese Society of Agricultural Machinery, 2008, 39(6): 1-6.
(编辑 杨幼平)
收稿日期:2016-10-21;修回日期:2017-01-18
基金项目(Foundation item):国家高技术研究发展计划(863 计划)项目(2011AA060404);中央高校基本科研业务费专项资金资助项目(FRF-TP-15-024A1)(Project(2011AA060404) supported by the National High Technology Research and Development Program (863 Program) of China; Project(FRF-TP-15-024A1) supported by the Fundamental Research Funds for the Central Universities)
通信作者:杨珏,博士, 副教授,从事非公路车辆的设计研究;E-mail:yangjue@ustb.edu.cn

