Т»ЦЦТЖ¶Ї»ъЖчИЛSLAMЦРµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·Ё
іВ°Ч·«Ј¬ІМЧФРЛЈ¬ЧЮЦЗИЩ
(ЦРДПґуС§ РЕПўїЖС§У빤іМС§Фє, єюДП і¤ЙіЈ¬410083)
ХЄТЄЈєХл¶ФТЖ¶Ї»ъЖчИЛН¬К±¶ЁО»УлЅЁНј(SLAM)ЦРµДѕЦІїКэѕЭ№ШБЄОКМвЈ¬МбіцТ»ЦЦ»щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁЎЈёГ·Ѕ·ЁЅ«КэѕЭ№ШБЄОКМвЧЄ»»іЙАлЙўУЕ»ЇОКМвЈ¬АыУГ¶аёцБЈЧУАґО¬іЦ¶аЦЦКэѕЭ№ШБЄјЩЙиЈ¬НЁ№эјЖЛг№ШБЄґъјЫАґ»сµГБЈЧУИЁЦШЈ¬УГ»щ±ѕјфЦ¦јјКхФЪБЈЧУЦШІЙСщ№эіМЦРВЛіэґнОуµДКэѕЭ№ШБЄјЩЙиЎЈСРѕїЅб№ы±нГчЈєёГ·Ѕ·ЁГЦІ№БЛѕµдµДКэѕЭ№ШБЄ·Ѕ·ЁЦР№ШБЄјЩЙиТ»µ©И·¶ЁѕНІ»ДЬРЮёДµДІ»ЧгЈ»УлICNNєНJCBBКэѕЭ№ШБЄ·Ѕ·ЁПа±ИЈ¬ёГ·Ѕ·ЁДЬ»сµГёьХэИ·µДКэѕЭ№ШБЄЅб№ыєНёьёЯµД¶ЁО»ѕ«¶ИЎЈ
№ШјьґКЈєТЖ¶Ї»ъЖчИЛЈ»Н¬К±¶ЁО»УлЅЁНјЈ»КэѕЭ№ШБЄЈ»¶ајЩЙи
ЦРНј·ЦАаєЕЈєTP242.6 ОДПЧ±кЦѕВлЈєA ОДХВ±аєЕЈє1672-7207(2012)02-0522-06
A multiple hypotheses data association method in mobile robot SLAM
CHEN Bai-fan, CAI Zi-xing, ZOU Zhi-rong
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: According to the local data association problem in mobile robot SLAM process, a new multiple hypotheses data association method based on the particle filter was presented. In the method, the data association problem was transformed as the discrete optimization, and multiple particles were used to maintain the multiple data association hypotheses and every particleЎЇs weight was calculated by association cost. During the resample, the wrong hypotheses were discarded through basic branch and bound approach. The results show that the method resolves the problem where the classic method cannot modify the previous association hypothesis. By experimental results analysis and comparison, the new method can reach more correct data association results and higher location precision than the classic ICNN and JCBB method.
Key words: mobile robot; simultaneous localization and mapping; data association; multiple hypotheses
ТЖ¶Ї»ъЖчИЛН¬К±¶ЁО»УлЅЁНј(Simultaneous localization and mappingЈ¬SLAM)ОКМвКЗТЖ¶Ї»ъЖчИЛСРѕїБмУтµД»щ±ѕОКМвУлСРѕїИИµгЈ¬ТІКЗТЖ¶Ї»ъЖчИЛХжХэКµПЦЧФЦчµДЧоЦШТЄµДМхјюЦ®Т»ЎЈЛщОЅН¬К±¶ЁО»УлЅЁНјЈ¬КЗЦё»ъЖчИЛФЪТЖ¶Ї№эіМЦРёщѕЭО»ЧЛ№АјЖєНґ«ёРЖчКэѕЭЅшРРЧФЙн¶ЁО»Ј¬Н¬К±ЅЁФмФцБїКЅµШНј[1]ЎЈКэѕЭ№ШБЄОКМвТІіЖТ»ЦВРФОКМвЈ¬±ѕКЗДї±кёъЧЩЦРµДОКМвЈ¬УГУЪИ·¶Ёґ«ёРЖчµДІвБїРЕПўєНДї±кФґЦ®јдµД¶ФУ¦№ШПµ[2]ЎЈФЪТЖ¶Ї»ъЖчИЛSLAMЦРКэѕЭ№ШБЄКЗЦёЅЁБўФЪІ»Н¬К±јдЎўІ»Н¬µШ¶О»сµГµДґ«ёРЖчІвБїЦ®јдЎўґ«ёРЖчІвБїУлµШНјМШХчЦ®јд»тХЯµШНјМШХчЦ®јдµД¶ФУ¦№ШПµЈ¬ТФИ·¶ЁЛьГЗКЗ·сФґУЪ»·ѕіЦРН¬Т»ОпАнКµМеµД№эіМЎЈЛьКЗSLAM±ѕЙнГжБЩµДМфХЅЦ®Т»Ј¬¶ФУЪSLAMµДЧґМ¬№АјЖЦБ№ШЦШТЄЈ¬ІўЦ±ЅУУ°ПмµЅSLAMµДјЖЛгёґФУ¶ИєНЅб№ыµДХэИ·РФЎЈДїЗ°Ј¬ТЖ¶Ї»ъЖчИЛSLAMЦРµДКэѕЭ№ШБЄµДСРѕїЦчТЄУР3ёц·ЅГжЈє
(1) ѕЦІїКэѕЭ№ШБЄЎЈµ±З°№ЫІвРЕПўУлТСУРµШНјЦРµДДіёцМШХчЖҐЕд»т2ёцБ¬РшµД№ЫІвЦЎјдµДЖҐЕд(Scan matching)ґУ¶шЅшРРМШХч»тДї±кµДёъЧЩОКМвµДЖҐЕдОКМвЈ¬ХвКЗSLAM№эіМЦР±ШІ»їЙЙЩµД»щ±ѕОКМвЈ¬ТІКЗ±ѕОДµДЦчТЄСРѕїОКМвЎЈ
(2) С»·±ХєПЎЈЦчТЄХл¶Ф»·ѕіЦРґжФЪС»·(Loop)µШРОµДЗйїцЎЈµ±ТЖ¶Ї»ъЖчИЛИЖС»·µШРО1ЦЬК±Ј¬ЧЫєПУ¦УГёч·ЅГжРЕПўИ·ИП»ъЖчИЛ»ШµЅБЛС»·ЖрµгЈ¬Іў»сµГµ±З°№ЫІвУлС»·Жрµгґ¦µШНјМШХчјдµД№ШБЄ№ШПµЈ¬¶Ф»ъЖчИЛ¶ЁО»ј°µШНјЅшРРОуІоРЮХэЎЈ
(3) µШНјєПІўЎЈ¶ФУЪґу·¶О§µД»·ѕіМЅЛчЈ¬РиТЄУГµЅ¶аёц»ъЖчИЛРЧчТФјхЙЩ»·ѕіМЅЛчК±јдЎўМбёЯ»·ѕіЅЁНјµДѕ«¶ИЎЈФЪ¶аёц»ъЖчИЛSLAMК±Ј¬ОЄБЛЙъіЙИ«ѕЦµШНјЈ¬ѕНіцПЦБЛёч»ъЖчИЛµДѕЦІїµШНјјдПаН¬ОпАнКµМеµДВ·±к№ШБЄОКМвЈ¬јґµШНјєПІўОКМвЎЈ
КэѕЭјдµД№ШБЄНЁіЈАыУГНіјЖ№АјЖµД·Ѕ·ЁАґИ·¶ЁЎЈДїЗ°Ј¬ФЪSLAMБмУтЦРТІМбіцБЛРн¶аКэѕЭ№ШБЄЛг·ЁЈ¬ґу¶аІЙУГГЕПЮ·ЁЈ¬ЖдЦР±ИЅПѕµдµДЛг·Ё°ьАЁµҐЖҐЕдЧоЅьБЪ(Individual compatibility nearest neighborЈ¬ICNN)Ўў·ЦЦ¦ПЮЅзБЄєПЖҐЕд(Joint compatibility branch and boundЈ¬JCBB)[3]ЎЈґЛНвЈ¬»№УРBaileyµИ[4]ТэИлНјВЫЛјПлЈ¬НЁ№эС°ХТ2·щНкИ«НјјдµДЧоґу№«№ІЧУНј»сµГ№ЫІвУлµШНјјдµДКэѕЭ№ШБЄЎЈёГ·Ѕ·ЁѕЯєЬЗїµДї№ёЙИЕДЬБ¦Ј¬µ«КЗЈ¬ЛСЛчЧоґу№«№ІЧУНјОКМвєЬДСЈ¬ЗТ№№ФмНкИ«НјРиТЄМбИЎ№ЫІвМШХчєН№ЫІвјдµДФјКшЈ¬µ±№ЫІвФц¶аК±јЖЛгБї»бПФЦшФцјУЎЈZhangµИ[5]Ѕ«¶аО¬·ЦЕдКэѕЭ№ШБЄЛг·ЁУ¦УГУЪSLAMЦРµҐЦЎ№ЫІвµДКэѕЭ№ШБЄЈ¬WijesomaµИ[6]УЦЅшТ»ІЅЅ«ёГ·Ѕ·ЁУ¦УГУЪ¶аЦЎ№ЫІвµДКэѕЭ№ШБЄЎЈHahnelµИ[7]МбіцБЛТ»ЦЦ¶иРФКэѕЭ№ШБЄ·Ѕ·ЁЈ¬ёГ·Ѕ·ЁНЁ№э»ШЛЭРЮХэ№эИҐґнОуµДКэѕЭ№ШБЄЈ¬µ«РиТЄјЖЛгО¬КэЅПґуѕШХуµДДжЈ¬єЬДСКµК±КµПЦЎЈ»ЖЗміЙµИ[8]У¦УГ»щУЪKDКчµДЧоЅьБЪЛг·ЁКµПЦБЛѕЦІїµШНјјдµДМШХчµгКэѕЭ№ШБЄЈ»НхжГжГ[9]СРѕїБЛДЈДвНЛ»рЛг·ЁЗуЅвSLAMЦРµДКэѕЭ№ШБЄ·Ѕ·ЁЈ»JiµИ[10]МбіцБЛТ»ЦЦ№ШБЄКчДЈРНЈ¬Іў¶Ф№ШБЄКчЅшРРУРПЮЙо¶И»ШЛЭЛСЛчКµПЦКэѕЭ№ШБЄЈ¬ёГ·Ѕ·ЁККУГУЪ»щУЪЧоРЎ¶юіЛµДНкИ«SLAMЎЈФЪДї±кёъЧЩ·ЅГжЈ¬Reid[11]Хл¶Ф¶аДї±кёъЧЩОКМвМбіцБЛТ»ЦЦ¶ајЩЙиёъЧЩµДКэѕЭ№ШБЄ·Ѕ·ЁЈ¬ёГ·Ѕ·Ё¶ФЛщУРВъЧгФјКшМхјюєуїЙДЬµД№ШБЄЅшРРјЩЙиЈ¬Іў¶ФјЩЙиЅшРРёъЧЩЈ¬ФЪТ»¶ЁК±јдТФєуІЕХжХэИ·¶ЁЧоУЕ»тґОУЕ№ШБЄ¶ФјЇєПЎЈФЪАнПлМхјюПВЈ¬¶ајЩЙиёъЧЩ·Ѕ·Ё±»ИПОЄКЗґ¦АнКэѕЭ№ШБЄµДЧоУЕ·Ѕ ·Ё[12]Ј¬ІўЗТУЙУЪЖд¶АУРµДёъЧЩМШРФЈ¬К№µГФЪ¶ЇМ¬»·ѕіПВТІДЬ±ЈЦ¤ЖдУРР§РФЎЈЙПКцКэѕЭ№ШБЄ·Ѕ·ЁЦРЈ¬Т»µ©№ЫІвБїєНВ·±кјдµД№ШБЄјЩЙи±»И·¶ЁЈ¬ґу¶аКэ·Ѕ·ЁѕНІ»ДЬЅшРРРЮёДЎЈУЙУЪµ±З°К±їМµДРЕПўБїИ±·¦µјЦВ№ШБЄјЩЙиґнО󣬶шХвёцґнОуЅ«У°ПмєуГжµДТЖ¶Ї»ъЖчИЛО»ЦГ№АјЖЈ¬ґУ¶шµјЦВєуРшµДКэѕЭ№ШБЄґнОуЎЈИз№ыДЬФЪТ»¶ОК±јдєуРЮХэЦ®З°·ўЙъґнОу№ЫІвЈ¬ѕНїЙТФ»сµГёьєГµДSLAMЅб№ыЎЈЙЩКэ·Ѕ·ЁДЬНЁ№э»ШЛЭЅшРРРЮХэЈ¬µ«РиТЄґуБїµДјЖЛгЈ¬КµК±РФІ»ЗїЎЈИз№ыДЬ№»О¬іЦ¶аёц№ШБЄјЩЙиЈ¬±гїЙФцјУ»сµГЧоУЕ»тґОУЕ№ШБЄјЩЙиµДёЕВКЎЈФЪґЛЈ¬±ѕОДЧчХЯМбіцТ»ЦЦ¶ајЩЙиµДКэѕЭ№ШБЄ·Ѕ·ЁЎЈФЪДіК±їМО¬іЦ¶аёцКэѕЭ№ШБЄјЩЙиЈ¬Йи¶ЁГїёцјЩЙијЖЛгґъјЫµДєЇКэЈ¬СЎФсµ±З°К±їМКэѕЭ№ШБЄјЩЙиґъјЫЧоРЎµДОЄµ±З°К±їМSLAMПµНіµДКэѕЭ№ШБЄЅб№ыЎЈёГ№ШБЄИ·¶ЁєуЈ¬ІўГ»УР¶ЄЖъЖдЛыµДјЩЙиЎЈКµјКЙПЈ¬ІЙУГёГ·Ѕ·ЁТЄѕ№эТ»¶ОК±јдІЕ»сµГХжХэµД№ШБЄЎЈОЄБЛјхЙЩјЖЛгБїЈ¬УГ»щ±ѕјфЦ¦јјКхВЛіэґнОуµДКэѕЭ№ШБЄјЩЙиЎЈФЪґЛЈ¬±ѕОДЧчХЯАыУГ¶аёцБЈЧУО¬іЦ¶аЦЦКэѕЭ№ШБЄјЩЙиЈ¬јґІЙУГБЈЧУВЛІЁЖчАґКµПЦ¶ајЩЙиКэѕЭ№ШБЄЛг·ЁЎЈ
1 SLAMЦРКэѕЭ№ШБЄОКМвГиКц
ФЪТЖ¶Ї»ъЖчИЛSLAM№эіМЦРЈ¬КэѕЭ№ШБЄ·ўЙъФЪФ¤ІвЅЧ¶ОЈ¬УГУЪЕР¶ПТС№№ЅЁµДµШНјЦРУлµ±З°№ЫІвРЕПўПаЖҐЕдµДМШХчЧУјЇЎЈЙиТЖ¶Ї»ъЖчИЛ№№ЅЁµДµШНјЦРУРnёцМШХч{F1Ј¬F2Ј¬ЎЈ¬Fn}Ј¬ґ«ёРЖчµДІвБїЦµEУРmёцјґ{E1Ј¬E2Ј¬ЎЈ¬Em}ЎЈКэѕЭ№ШБЄѕНКЗХТµЅµШНјМШХчУлІвБїЦµјдµД№ШПµЈ¬їЙГиКцОЄ
 (1)
(1)
ЖдЦРЈєjiОЄµШНјЦРµЪjёцМШХчFjУлµЪiёцІвБїЦµEiµДПа№ШЦµЈ¬µ±БЅХЯНкИ«І»Па№ШК±Ј¬ji=0ЎЈ
ФЪSLAM№эіМЦРЈ¬ёщѕЭЗ°Т»К±їМТЖ¶Ї»ъЖчИЛµДО»ЧЛєНФЛ¶ЇДЈРНїЙТФФ¤Івµ±З°К±їМТЖ¶Ї»ъЖчИЛО»ЧЛЈє
 (2)
(2)
ЖдЦРЈєfОЄЧґМ¬ґ«µЭєЇКэЈ»vkКЗФ¤ІвФлЙщЈ¬°ьАЁПµНіµДЛж»ъФлЙщєНДЈРН±ѕЙнµДІ»И·¶ЁРФЈ¬Т»°гІЙУГ·юґУёЯЛ№·ЦІјФлЙщЎЈ
ёщѕЭkК±їМ№ЫІвДЈРНїЙТФФ¤ІвµШНјМШХчµДО»ЦГЈє
 (3)
(3)
ЖдЦРЈєhОЄІвБїєЇКэЈ»wk,jОЄІвБїФлЙщЈ¬°ьАЁ±нКѕІвБї№эіМЦРµДґ«ёРЖчµДОуІоєНДЈРН±ѕЙнµДІ»И·¶ЁРФЎЈµЪiёц№ЫІвЦµєНТСУРµШНјЦРµЪjёцМШХчјдµДѕаАлїЙУГРВПўј°ЖдР·ЅІо±нКѕЈє
 (4)
(4)
 (5)
(5)
EiєНFjЦ®јдКЗ·сПа№ШѕНТЄїґЛьГЗЦ®јдµДMahalanobisѕаАлКЗ·сРЎУЪДіёцгРЦµЈ¬јґ

(6)
ИфРВПў ·юґУёЯЛ№·ЦІјЈ¬Фт±кЧј»ЇєуµДѕаАлУ¦ВъЧг
·юґУёЯЛ№·ЦІјЈ¬Фт±кЧј»ЇєуµДѕаАлУ¦ВъЧг ·ЦІјЎЈ
·ЦІјЎЈ
ОЄБЛєЬєГµШО¬іЦ¶аЦЦКэѕЭ№ШБЄјЩЙиЈ¬ІўДЬґУ¶аЦЦјЩЙиЦРС°ХТЧоУЕµД№ШБЄјЩЙиЈ¬КЧПИРиТЄЅЁБўГиКц¶аКэѕЭ№ШБЄјЩЙи·Ѕ·ЁЎЈ±ѕОДІ»ІЙУГКЅ(1)ЛщКѕµДКэѕЭ№ШБЄГиКц·Ѕ·ЁЈ¬¶шБнНв¶ЁТе№ШБЄјЩЙи±дБїОЄrijЈ¬µ±№ЫІвБїУлµШНјЦРДіёцМШХчПа№ШБЄК±јґОЄ1Ј¬·сФтОЄ0Ј¬ФтSLAMЦРµДКэѕЭ№ШБЄОКМвѕНЧЄ»ЇіЙБЛ0-1ХыКэ№ж»®ОКМвЎЈФЪТ»°гЗйїцПВЙи¶Ё№ШБЄ±дБїУ¦ВъЧ㵥ԴԼКшМхјюЈ¬јґ1ёц№ЫІвБїЧо¶аЦ»ФґУЪ1ёцОпАнВ·±кМШХчЈ¬1ёцМШХчЧо¶аЦ»ІъЙъ1ёц№ЫІвБїЈ¬ТтґЛЈ¬КэѕЭ№ШБЄ±дБї¶ЁТеИзПВЈє
 (7)
(7)
 (8)
(8)
 (9)
(9)
ЖдЦРЈєr0j=1±нКѕМШХчjФЪµ±З°ЦЎЦРГ»УРУлЦ®Па№ШБЄµД№ЫІвБїЈ»ri0=1±нКѕ№ЫІвБїiУлЛщУРМШХч¶јІ»ЖҐЕдЈ¬УРїЙДЬКЗРВВ·±к»тРйѕЇ(І»КЗХжКµОпАнВ·±кµД·ґУіЈ¬¶шКЗґ«ёРЖчФлЙщ»тѕµГж·ґЙдµИТэЖрµД)ЎЈ
ЙиkК±їМ№ЫІвБїУлВ·±кјдУРLЦЦ№ШБЄјЩЙијЇєПЈ¬Жд№ШБЄјЩЙиµДУтОЄRkЈ¬Rk,lОЄЖдЦРµДТ»Чй№ШБЄјЩЙијЇЈ¬јґ
 (10)
(10)
Rk,lїЙїґіЙУЙ0єН1ЧйіЙµДВъЧгФјКшМхјюµД¶юО¬ѕШХуЈ»l=1Ј¬ЎЈ¬LЎЈКэѕЭ№ШБЄОКМвѕН±діЙБЛС°ХТ№ШБЄјЩЙијЇєПЦРЧоУЕµДТ»ЧйјЩЙијЇЈ¬јґїЙµИјЫОЄТФПВАлЙўУЕ»ЇОКМвЈє
 (11)
(11)
rk,ijВъЧгКЅ(7)~(9)ЎЈ
2 »щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·Ё
ФЪ»щУЪБЈЧУВЛІЁµДТЖ¶Ї»ъЖчИЛSLAM·Ѕ·ЁЦРЈ¬ІЙУГБЈЧУАґ±Јґж»ъЖчИЛО»ЧЛµДїЙДЬ·ЦІјєНµШНјЦРВ·±кµДїЙДЬ·ЦІјЈ¬НЁ№эІ»¶ПІЙСщєНёьРВёъЧЩХыёцSLAM№эіМЈ¬°ґБЈЧУИЁЦШ»сµГЧоЅУЅьХжКµЗйїцµД»ъЖчИЛВ·ѕ¶№мјЈєНµШНјЎЈИфЅ«ТЖ¶Ї»ъЖчИЛµДО»ЧЛєН»·ѕіЦРВ·±кО»ЦГїґЧчТЖ¶Ї»ъЖчИЛSLAMПµНіЧґМ¬Ј¬ФтёГ·Ѕ·ЁµДКµЦКѕНКЗ¶ФТЖ¶Ї»ъЖчИЛSLAMЧґМ¬ЅшРР¶аЦЦјЩЙиІўёъЧЩЎЈ±ѕОДЅ«АыУГБЈЧУВЛІЁЖчАґКµПЦ¶ајЩЙиКэѕЭ№ШБЄЎЈ
ІЙУГ¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁЈ¬ФЪГїґО№ЫІвєуЅ«ЙъіЙµ±З°К±їМµД¶аёцКэѕЭ№ШБЄјЩЙиЈ¬ІўјЖЛгГїЦЦКэѕЭ№ШБЄјЩЙиµДґъјЫЈ¬ТФ»сµГµ±З°К±їМSLAMµДКэѕЭ№ШБЄЅб№ыЎЈ»щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄЛг·ЁЈ¬Йи¶ЁГїёцБЈЧУ°ьє¬БЛµ±З°µДјЩЙи№ШБЄјЇRk,lєНБЈЧУИЁЦШwЈ¬јґs={Rk,lЈ¬w}ЎЈИфУРNёцБЈЧУЈ¬ФтїЙО¬іЦІўёъЧЩNЦЦјЩЙи№ШБЄЎЈ¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁБчіМЦРЦчТЄДЈїй¶ФУ¦УЪБЈЧУВЛІЁµДДЈїйИзНј1ЛщКѕЎЈ
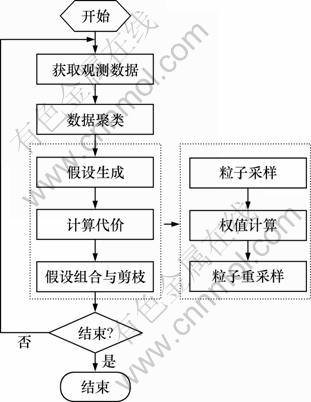
Нј1 »щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄЛг·ЁБчіМ
Fig.1 Multiple hypotheses data association algorithm flow based on particle filter
»сµГјЩЙиЙъіЙКЗ¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁЦРЧо№ШјьµДІЅЦиЈ¬ТІѕц¶ЁБЛХыёцЛг·ЁµДёґФУ¶ИЈ¬¶шКэѕЭ№ШБЄјЩЙиµДґъјЫјЖЛгФтѕц¶ЁБЛµ±З°К±їМSLAMµДµШНјєН»ъЖчИЛО»ЧЛёьРВµДХэИ·РФЎЈ
ФЪКэѕЭ№ШБЄ№эіМЦРЈ¬ГїЦЎ№ЫІвєНµШНјµД№ШБЄУлЦ®З°µДКэѕЭ№ШБЄІў·ЗНкИ«¶АБўЈ¬УРТ»¶Ё№ШПµЎЈјЩЙиµЪkК±їМЛщУРµД№ШБЄјЩЙијЇєПRkКЗУЙk-1К±їМµД№ШБЄјЩЙијЇєПRk-1єНkК±їМ»сИЎµД№ЫІвКэѕЭZkПа№ШРОіЙЈєРВµД№ШБЄјЩЙијЇєПRk,lУЙRk-1,lЦРГїёцПИСйµДјЩЙиУл№ЫІвБїzk,iПа№ШРОіЙЈ¬ИзґЛС»·Ј¬Ц±µЅЛщУРµДПИСйјЩЙиєН№ЫІвБїјЇґ¦АнНкіЙОЄЦ№Ј¬РОіЙЧоЦХµДјЩЙијЇRkЎЈЖдЦРЈ¬zk,iУРїЙДЬКЗФґУЪТС№№ЅЁµШНјЦРµДВ·±кЎўРВ№ЫІвµЅµДВ·±к»тХЯРйѕЇЎЈТтґЛЈ¬їЙЙи№ШБЄјЩЙијЇєПRk,lОЄПИСйјЩЙиRk-1,lУл¦ХkµДБЄєПјЩЙиЈє
 (12)
(12)
ЖдЦРЈє¦Хk¶ЁТеОЄZkЦРЛщУР№ЫІвБїУлПИСйјЩЙиЦ®јдµДКэѕЭ№ШБЄЎЈ№ШБЄјЩЙијЇєПRk,lµДёЕВКОЄЈє
 (13)
(13)
ЖдЦРЈє ±нКѕёш¶Ё№ШБЄјЩЙиМхјюПВ»сИЎ№ЫІвБїµДПИСйёЕВКЈ»
±нКѕёш¶Ё№ШБЄјЩЙиМхјюПВ»сИЎ№ЫІвБїµДПИСйёЕВКЈ» ±нКѕёш¶ЁПИСйјЩЙиК±µДКэѕЭ№ШБЄёЕВКЎЈУЙґЛїЙїґіцЈ¬КЅ(13)КЗТ»ЦЦµЭНЖРОКЅЈ¬№ШБЄјЩЙиїЙµЭНЖНкіЙЈ¬ТСґ¦Ан№эµДРЕПўѕНІ»РиТЄЦШРВјЖЛгЎЈОЄјт»ЇјЖЛгЈ¬ИЎRk,lёЕВКµД¶ФКэОЄёГ№ШБЄјЩЙиµДґъјЫєЇКэЈ¬јґ
±нКѕёш¶ЁПИСйјЩЙиК±µДКэѕЭ№ШБЄёЕВКЎЈУЙґЛїЙїґіцЈ¬КЅ(13)КЗТ»ЦЦµЭНЖРОКЅЈ¬№ШБЄјЩЙиїЙµЭНЖНкіЙЈ¬ТСґ¦Ан№эµДРЕПўѕНІ»РиТЄЦШРВјЖЛгЎЈОЄјт»ЇјЖЛгЈ¬ИЎRk,lёЕВКµД¶ФКэОЄёГ№ШБЄјЩЙиµДґъјЫєЇКэЈ¬јґ
 (14)
(14)
НЁіЈЈ¬ПИСй·ЦІјp(Rk,l)ОЄіЈКэЈ¬ФтКЅ(11)µДКэѕЭ№ШБЄХыКэ№ж»®µДј«ґу»ЇОКМвѕН±діЙБЛј«РЎ»ЇОКМвЎЈґъјЫєЇКэФЅРЎЈ¬ФтЖдПа¶ФУ¦µД№ШБЄјЩЙиФЅЅУЅьХжКµµДКэѕЭ№ШБЄЎЈ
»щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄЛг·ЁКЗТ»ёц°ьє¬БЈЧУІЙСщЎўИЁЦШјЖЛгєНЦШІЙСщІЅЦиІ»¶ПµьґъµД№эіМЈєКЧПИ¶Ф№ЫІвКэѕЭЅшРРѕЫАаЈ»ёщѕЭКЅ(13)¶Фµ±З°БЈЧУјЇєПЅшРРІЙСщЈ¬»сµГПВТ»К±їМµДБЈЧУјЇєПЎЈНЁ№эПВКЅјЖЛгБЈЧУµДИЁЦШЈє
 (15)
(15)
БЈЧУЦР±ЈґжµДјЩЙиКэѕЭ№ШБЄјЇµДґъјЫєЇКэЦµФЅРЎЈ¬ёГБЈЧУИЁЦШФЅёЯЈ»ФЪБЈЧУЦШІЙСщ№эіМЦРЈ¬АыУГјфЦ¦јјКхИҐµфґнОуµДКэѕЭ№ШБЄјЩЙиЎЈ
3 КµСйЅб№ыУл·ЦОц
КµСйІЙУГѕµдµДNeiraµД·ВХжКµСйКэѕЭ[13]ЎЈОЄјт»ЇЈ¬ФЪКµСй№эіМЦРЅ«±ѕОДМбіцµД»щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁјтіЖОЄPFMHЎЈ»ъЖчИЛНЁ№эЗ°ПтФЛ¶ЇєНЧЄПтФЛ¶ЇЅшРРїШЦЖЈ¬З°ПтФЛ¶ЇЛЩ¶ИОЄ0.312 5 m/sЈ¬ЧЄЛЩОЄ9 Ўг/sЎЈЙи¶Ё»ъЖчИЛµДґ«ёРЖчµДёРЦЄѕаАлОЄ3.5 mЈ¬ЅЗ¶ИОЄ180ЎгЈ¬ґ«ёРЖч№ЫІвЦЬЖЪОЄ1 sЎЈЙи»ъЖчИЛіхКјФЛ¶ЇїШЦЖОуІоµД·ЅІо¦Тveh=(¦ТvЈ¬¦Т¦И)(ЖдЦРЈєЗ°ПтФЛ¶ЇЛЩ¶ИїШЦЖОуІо·ЅІо¦Тv=0.01Ј¬ЧЄПтФЛ¶ЇїШЦЖОуІо·ЅІо¦Т¦И=2)ЎЈґ«ёРЖчіхКј№ЫІвОуІоµД·ЅІо¦Тsensor=(¦Т¦СЈ¬¦Т¦Х)(ЖдЦРЈє№ЫІвѕаАлОуІо·ЅІо¦Т¦С=0.01Ј¬ЧЄПтФЛ¶ЇїШЦЖОуІо·ЅІо¦Т¦Х=0.125)ЎЈНј2єННј3ЛщКѕ·Ц±рОЄІЙУГ»щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁµДSLAM(КµСйЦРјтіЖPFMH-SLAM)µД¶ЁО»ОуІоєНКэѕЭ№ШБЄЅб№ыЈ¬ЖдЦРSLAMЅвѕц·Ѕ·ЁІЙУГА©Х№їЁ¶ыВьВЛІЁ·Ѕ·ЁЎЈ

Нј2 PFMH-SLAMµД¶ЁО»ОуІо
Fig.2 Localization errors of PFMH-SLAM
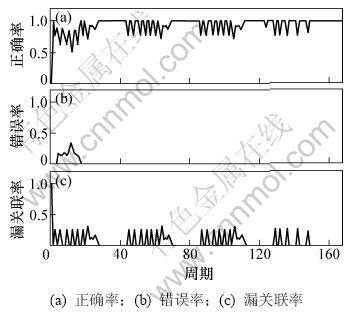
Нј3 PFMH-SLAMµДКэѕЭ№ШБЄЅб№ы
Fig.3 Data association results of PFMH-SLAM
ґУНј2єННј3їЙТФїґіцЈєPFMH-SLAMФЪКµСйЦР±нПЦіцєЬёЯµД¶ЁО»ѕ«¶ИєНКэѕЭ№ШБЄХэИ·ВКЎЈЅПґуµД№ШБЄВ©јмВКЦчТЄКЗУЙУЪ»ъЖчИЛЅЗ¶ИФ¤ІвіцПЦЅПґуОуІоЎЈ
Нј4ЛщКѕОЄ3±¶іхКјФЛ¶ЇїШЦЖОуІо·ЅІоК±Ј¬»щУЪµҐЖҐЕдЧоЅьБЪµДSLAM(ICNN-SLAM)Ўў»щУЪ·ЦЦ¦ПЮЅзБЄєПЖҐЕдµДSLAM(JCBB-SLAM)єН±ѕОДМбіцµДPFMH-SLAMХв3ЦЦ·Ѕ·ЁµДКэѕЭ№ШБЄХэИ·ВКЎўґнОуВКєНВ©јмВКЎЈґУНј4їЙТФїґіцЈєФЪФЛ¶ЇїШЦЖОуІоФцґуµЅ3±¶К±Ј¬ICNNКэѕЭ№ШБЄХэИ·ВКµНЈ¬ґнОуВКєЬёЯЈ¬JCBBєНPFMHФт±ЈіЦЧЕЅПёЯµДКэѕЭ№ШБЄХэИ·ВКєНЅПµНµДґнОуВКЎЈУЙУЪВ©јмВКЅцУлґ«ёРЖч№ЫІвµДОуІоГЬЗРПа№ШЈ¬ТтґЛЈ¬3ЦЦ·Ѕ·ЁµДВ©јмВК»щ±ѕПаН¬ЎЈ

Нј4 3±¶¦ТvehК±3ЦЦ·Ѕ·ЁКэѕЭ№ШБЄЅб№ы±ИЅП
Fig.4 Experimental results comparison of three times ¦Тveh
ФЪІ»Н¬µДФЛ¶ЇОуІоєН№ЫІвОуІоПВЈ¬ТФіхКјµДФЛ¶ЇїШЦЖОуІо·ЅІоєНіхКј№ЫІвОуІоОЄ»щґЎ·Ц±рЅшРР±¶ФцµчХыЈ¬¶ФЙПКц3ЦЦ·Ѕ·ЁЅшРР¶аґОКµСйЎЈФЪПаН¬ОуІоМхјюПВЈ¬¶ФГїЦЦ·Ѕ·ЁЅшРР20ґОКµСйЈ¬ГїґОКµСйЦШРВЛж»ъЙиЦГ·ВХж»·ѕіЦРµДВ·±кЈ¬ЖдКµСйЅб№ыИзНј5ЛщКѕЎЈ
ґУНј5(a)їЙјыЈє3ЦЦ·Ѕ·ЁµДЖЅѕщКэѕЭ№ШБЄХэИ·ВК¶ј»бЛжЧЕ№ЫІвОуІоµДФцґу¶шПВЅµЎЈХвКЗУЙУЪЗ°2ЦЦ·Ѕ·Ё±ѕЦКЙП¶јКЗТ»ЦЦГЕПЮФјКшµД№ШБЄЕР¶П·Ѕ·ЁЈ¬PFMHФЪјЖЛг№ШБЄґъјЫК±ТІК№УГБЛХвТ»ФјКшЎЈУЙУЪPFMH·Ѕ·Ё¶Ф№эИҐґнОуКэѕЭ№ШБЄУРТ»¶ЁРЮХэДЬБ¦Ј¬ТтґЛЈ¬ФЪН¬Сщ№ЫІвОуІоМхјюПВ»б»сµГ±ИЗ°БЅХЯёьёЯµДХэИ·ВКЎЈґУНј5(b)їЙјыЈєµ±»ъЖчИЛФЛ¶ЇїШЦЖОуІоґуУЪ2±¶іхКјОуІоК±Ј¬ICNN·Ѕ·ЁµДЖЅѕщКэѕЭ№ШБЄХэИ·ВКј±ЛЩПВЅµЈ»µ±ґуУЪ4±¶іхКјОуІоК±Ј¬JCBB·Ѕ·ЁµДЖЅѕщКэѕЭ№ШБЄХэИ·ВКТІїЄКјСёЛЩПВЅµЈ¬¶шPFMH·Ѕ·ЁФЪФЛ¶ЇїШЦЖОуІоґуУЪ6±¶іхКјОуІоК±ІЕїЄКјПВЅµЈ¬Іў±ЈіЦЧоёЯµДХэИ·ВКЎЈ»ъЖчИЛФЛ¶ЇїШЦЖОуІо·ЅІоІ»¶ПФцјУК±Ј¬»щУЪХв3ЦЦ·Ѕ·ЁµДSLAM¶Ф»ъЖчИЛФЪX·ЅПтЎўY·ЅПтєНЅЗ¶ИµД¶ЁО»ОуІоµД±д»ЇјыНј5(c)ЎЈґУНј5(c)їЙјыЈєУлICNN·Ѕ·ЁПа±ИЈ¬JCBB·Ѕ·ЁєНPFMH·Ѕ·ЁЖЅѕщ¶ЁО»ОуІоФці¤ЅП»єВэЈ¬ЗТPFMH·Ѕ·Ё»сµГµДЖЅѕщ¶ЁО»ОуІоЧоРЎЎЈ
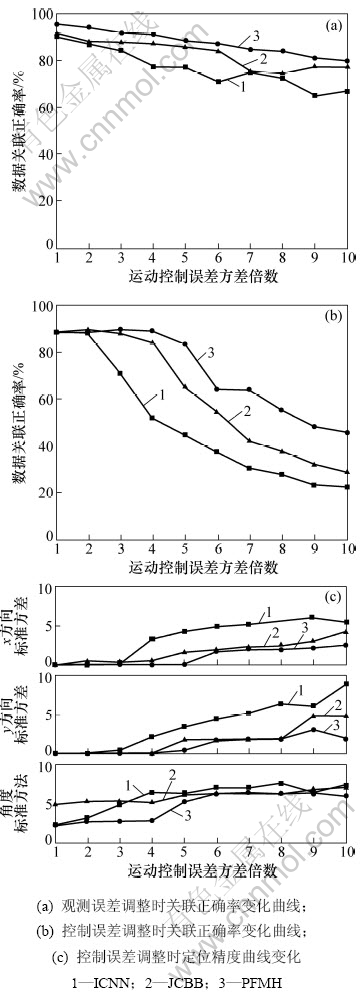
Нј5 3ЦЦКэѕЭ№ШБЄ·Ѕ·ЁЅб№ы±ИЅП
Fig.5 Experimental results comparison of three data association methods
4 ЅбВЫ
(1) Хл¶ФѕµдКэѕЭ№ШБЄ·Ѕ·ЁТ»µ©№ШБЄјЩЙиИ·¶ЁѕНІ»ДЬРЮёДµДІ»ЧгЈ¬Ѕ«КэѕЭ№ШБЄОКМвЧЄ»»іЙАлЙўУЕ»ЇОКМвЈ¬АыУГ¶аёцБЈЧУАґО¬іЦ¶аЦЦКэѕЭ№ШБЄјЩЙиЎЈ
(2) »щУЪБЈЧУВЛІЁµД¶ајЩЙиКэѕЭ№ШБЄ·Ѕ·ЁКµјКЙПКЗФЪТ»¶ОК±јдєуІЕ»сµГХжХэЧоУЕ»тґОУЕµД№ШБЄЅб№ыЈ¬ѕЯУРХэИ·µДКэѕЭ№ШБЄЅб№ыєНёьёЯµД¶ЁО»ѕ«¶ИЎЈ
(3) ІЙУГёГ·Ѕ·ЁФЪёґФУ»·ѕіПВИзєОјхРЎјЖЛгБїН¬К±О¬іЦЖдЧјИ·¶ИУРґэЅшТ»ІЅСРѕїЎЈ
ІОїјОДПЧЈє
[1] Нхиґ, ІМЧФРЛ. ОґЦЄ»·ѕіЦРТЖ¶Ї»ъЖчИЛІў·ўЅЁНјУл¶ЁО»(CML)µДСРѕїЅшХ№[J]. »ъЖчИЛ, 2004, 26(4): 380-384.
WANG Lu, CAI Zi-xing. Progress ofЎЎCML for mobile robots in unknown environments[J]. Robot, 2004, 26(4):380-384.
[2] є«ізХС, ЦмєйСЮ, ¶ОХЅК¤, µИ. ¶аФґРЕПўИЪєП[M]. ±±ѕ©: Зе»ЄґуС§іц°жЙз, 2006: 290-334.
HAN Chong-zhao, ZHU Hong-yan, DUAN Zhan-sheng. Multi- source information fusion[M]. Beijing: Tsinghua University Press, 2006: 290-334.
[3] Neira J, Tardos J D. Data association in stochastic mapping using the joint compatibility test[J]. IEEE Transactions on Robotics and Automation, 2001, 17(6): 890-897.
[4] Bailey T, Nebot E M, Rosenblatt J K, et al. Data association for mobile robot navigation: A graph theoretic approach[C]// Proceedings of the IEEE International Conference on Robotics and Automation. San Francisco, USA, 2000: 2512-2517.
[5] ZHANG Sen, XIE Li-hua, Martin A. An efficient data association approach to simultaneous localization and map building[C]// Proceedings of the IEEE International Conference on Robotics and Automation. New Orleans, USA, 2004: 854-859.
[6] Wijesoma W S, Perera L D L, Adams M D. Toward multidimensional assignment data association in robot localization and mapping[J]. IEEE Transactions on Robotics and Automation, 2006, 22(2): 350-365.
[7] Hahnel D, Thrun S, Wegbreit B, et al. Towards lazy data association in SLAM[C]//Proceedings of the International Symposium on Robotics Research. Sienna, Italy, 2003: 421-431
[8] »ЖЗміЙ, єй±юИЫ, АчГЇєЈ, µИ. »щУЪЦч¶Ї»·РО±ХєПФјКшµДТЖ¶Ї»ъЖчИЛ·ЦІгН¬К±¶ЁО»єНµШНјґґЅЁ[J]. јЖЛг»ъСРѕїУл·ўХ№, 2007, 44(4): 636-642.
HUANG Qing-cheng, HONG Bing-rong, LI Mao-hai. Mobile robot hierarchical simultaneous localization and mapping based on active loop closure constraint[J]. Journal of Computer Research and Development, 2007, 44(4): 636-642.
[9] НхжГжГ. ТЖ¶Ї»ъЖчИЛSLAMЦРµДКэѕЭ№ШБЄЛг·ЁСРѕї[D]. МмЅт: ДПїЄґуС§ИнјюС§Фє, 2007: 10-50.
WANG Ting-ting. Research on data association algorithm in mobile robot SLAM[D]. Tianjin: Nankai University. College of Software, 2007: 10-50.
[10] JI Xiu-cai, ZHANG Hui, HAI Dan, et al. Incremental simultaneous localization and mapping with backtracking data association for mobile robots[C]//Proceedings of the IEEE International Conference on Information and Automation. Zhangjiajie, China, 2008: 634-639.
[11] Reid D. An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1979, 24(6):843-854.
[12] Stone L D, Corwin T L, Barlow C A. Bayesian multiple target tracking[M]. Boston: Artech Print on Demand, 1999: 123-140.
[13] Neira J. Continuous SLAM [EB/OL]. http://webdiis. unizar.es/~neira/5007439/dalab.zip. 2008-12-10.
(±ај іВІУ»Є)
КХёеИХЖЪЈє2011-03-01Ј»РЮ»ШИХЖЪЈє2011-05-25
»щЅрПоДїЈє№ъјТЧФИ»їЖС§»щЅрЦШґуЧЁПо(90820302)Ј»№ъјТЧФИ»їЖС§»щЅрГжЙП(ЗаДк)ПоДї(60805027)Ј»ЦРДПґуС§ЧФУЙМЅЛчјЖ»®»щЅрЧКЦъПоДї(2010Дк)
НЁРЕЧчХЯЈєіВ°Ч·«(1979-)Ј¬Е®Ј¬єюДПіЈµВИЛЈ¬І©КїЈ¬ЅІК¦Ј¬ґУКВТЖ¶Ї»ъЖчИЛ¶ЁО»УлЅЁНјµИСРѕїЈ»µз»°Јє0731-88830583Ј»E-mailЈєchenbaifan@21cn.com

