轻轨车辆电机直驱独立车轮电气耦合技术
孙效杰,陆正刚
(同济大学 铁道与城市轨道交通研究院,上海,201804)
摘要:为恢复独立车轮轻轨车辆的自导向能力,应用定子电路中串入电容的电轴技术到驱动独立车轮的牵引电机之间,形成独立车轮之间的电气耦合同步。研究结果表明:耦合性能对电机转速灵敏度高,降低电机转速,耦合能力增加;转子接入的电阻与电容较小时,对耦合性能影响也较小;当电阻与电容较大时,参数灵敏度高,增加转子接入阻抗,耦合能力下降。理论分析后确定电气耦合轮对是根据左右车轮相对转角自动产生耦合转矩的技术。建立轻轨车辆横向动力学模型,电气耦合轮对与经典的弹性阻尼耦合轮对仿真结果表明:独立车轮构成电气耦合轮对后,恢复了自导向能力;二者均具有曲线通过能力;电机为产生耦合力矩而造成的最大功耗仅几百瓦。
关键词:轻轨车辆;电轴技术;建模仿真;电气耦合技术;导向
中图分类号:U270.1 文献标志码:A 文章编号:1672-7207(2014)10-3694-06
Electrical coupled method of independently rotating wheels with motor directly driving in light railway vehicles (LRV)
SUN Xiaojie, LU Zhenggang
(Institute of Railway and Urban Mass Transit, Tongji University, Shanghai 201804, China)
Abstract: Electromagnetic working shaft (EMWS) with insertion capacitances in the rotor coils was applied in traction motors driving independently rotating wheel (IRW) of light railway vehicles (LRV) to restore the self-steering performance with electrical coupled synchronous method. Research on parameter sensitivity of coupled capacity was carried out in theoretical methods. The results show that motor rotating speed is a high sensitive parameter for coupling capacity. Reducing the rotating speed of motor would increase the coupling capacity. Resistance and capacitance in the rotor coils have small effect on the coupling ability while they are small. But for high resistance and capacitance with high parameter sensitivity, increasing the impedance in the rotor coils would make the coupling ability down. The principle of electrical coupled wheelsets (ECW) was that coupling torque would automatically emerge according to the rotating angular difference between two wheels. Lateral dynamic models of LRV with ECW or elasto-damper coupled wheelsets (EDCW) were established to simulate the steering behavior. IRW transforms into electrical coupled wheelsets with self-steering performance. Both of them have curving ability. It is a low-power cost in electrical coupler system as the maximum power consumption just hundreds of Watt to produce coupled torque.
Key words: light railway vehicles; electromagnetic working shaft; modeling simulation; electrical coupled method; steering
独立车轮因取消了中间的车轴可以有效降车厢低地板面高度,在轻轨车辆上广泛应用。但独立车轮可以自由旋转,缺乏纵向蠕滑导向力矩,自导向性能不如传统轮对,需要施加其他技术使其恢复自导向能力。
独立车轮最常用导向措施就是采用某种方式耦合车轮的旋转,使之不再独立。早期研究人员提出弹簧阻尼、机械齿轮、磁力、离心力等耦合技术,部分技术已经在轻轨车辆得到应用[1-3]。如ADtranz公司(已被Bombardier收购)的GTxN系列轻轨车辆、Alstom公司的Citadis系列Arpège和Solfège转向架等都采用横轴耦合左右车轮;Siemens公司的Combino,Combino Plus和Avenio,Ansaldo Breda公司的Sirio,Kinki Sharyo公司的Jtram和Crotram公司的TMK2200,其牵引电机纵向架悬于外侧,驱动同侧前后车轮[4];中国北车集团长春客车股份公司生产的100%低地板轻轨车也采用类似纵向耦合技术[5-6]。机械耦合技术存在耦合度不易调节、机械结构复杂的缺陷。电气耦合技术成熟,且控制方便,简化系统机械结构,成为发展的必然趋势。四电机驱动独立车轮转向架,可省去齿轮等机械连接部件,已在轻轨车辆中如ADtranz公司的Eurotram,Incentro和Variotram转向架,Duewag公司(已被Siemens收购)的R3.1转向架,Skoda公司的ForCity轻轨车转向架中得到广泛应用。针对这类转向架,可以控制牵引电机实现牵引与导向集成控制,不需要额外的导向装置。如:Perez等[7-8]提出轮毂电机驱动独立车轮主动导向控制方案;Sun等[9-10]提出一种电气耦合轮对(electrical coupled wheelsets,简称ECW)技术。应用电轴技术实现驱动车轮间的耦合,替代机械耦合装置,转向架机械结构简单,且控制方便,但通过调节电阻改变耦合强度,系统能耗大。较多的电机功率用于产生耦合力矩,将降低列车牵引重量。采用改进的电轴技术,其转子电路串入电容,系统不但耦合能力增强,而且通过调节电容改变耦合能力,能耗低。
1 电轴同步技术
1.1 技术原理
机械轴实现多电机同步拖动系统存在布置空间大,难以适应电机间距离较长等问题。电轴同步技术是一种多电机拖动系统中实现在系统负载不等时的同步拖动技术。带公共变阻器的电轴系统中电机即起到拖动作用也起到同步作用,系统结构简单。但因在转子电路中接入电阻,依靠改变电阻大小实现调节平衡转矩,能耗大,功效低[11]。串入电容的电轴系统,如图1所示,两电机M1和M2是型号和参数完全相同的绕线异步电机,T1 和T2 分别表示两电机M1和M2负载转矩,定子端并联接于同一个交流电源上,转子电路先串入电容,再并入感应变阻器[12]。
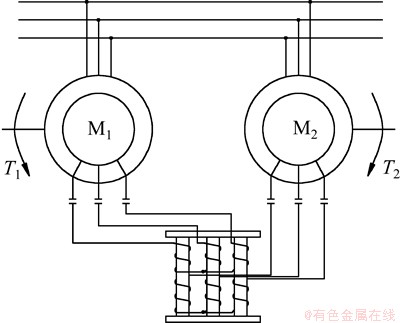
图1 串入电容的电轴系统示意图
Fig.1 Diagram of EMWS with insertion capacitances
当左、右负载转矩相同时,两电机同步,转子间无相位差角,无平衡电流;负载不等时,有平衡电流出现,能量流动于两电机之间产生附加转矩,使得负载较大的一侧电机输出转矩增大,负载较小的一侧输出转矩降低。电轴系统依据负载的变化自动平衡转矩输出,达到两电机同步运行。
采用等效电路,分析转子电路三相绕组均接成星形的串入电容电轴系统(图2),其中U1和U2分别为电机M1和M2的定子相电压;I21和I22分别为电机M1和M2的转子电流;R1,R2和R0分别为电机定子电阻、转子电阻和感应变阻器电阻;X1,X2和X0分别为电机定子感抗、转子感抗和感应变阻器感抗;RΩ,XΩ和XC分别为转子电路中的串入的电阻、感抗和容抗;Rμ和Xμ分别为电机励磁侧电阻和感抗;s为转差率;j为虚数单位。

图2 串入电容的电轴系统一相等效电路
Fig.2 Single-phase equivalent circuit of EMWS with insertion capacitances
系统电压平衡方程为
 (1)
(1)
其中:
 。当负载不同时(假设T1>T2),负载重的一侧电机M1的转子滞后于负载轻的电机M2转子电角度θ。定子相电压
。当负载不同时(假设T1>T2),负载重的一侧电机M1的转子滞后于负载轻的电机M2转子电角度θ。定子相电压 ,电轴系统中两电机电磁转矩T1, 2为
,电轴系统中两电机电磁转矩T1, 2为


 (2)
(2)
式中:n0为电机同步转速;m为电机的相数;Xk=X0+ X1+X2;Rk=R1+R2/s+R0/s;“+”对应负载重一侧电机转矩T1;“-”对应负载轻一侧电机转矩T2。当电轴系统负载不同时,两电机电磁转矩中存在附加转矩,负载较小一侧为制动性转矩分量,而负载较大一侧是拖动性转矩分量。系统平衡负载的能力取决于两电机间的电磁转矩差ΔT:

 (3)
(3)
从式(3)可以得出:串入电容的电轴系统平衡转矩与位差角θ是正弦函数关系;平衡转矩受电机相电压、转速、定转子参数和转子电路接入阻抗等参数影响。若系统电机选定,则电机额定电压、定转子等参数即为定值。所以,电机转速、转子电路串入阻抗XC和RΩ,方便用于调节平衡转矩。
1.2 参数对耦合能力的影响
以YR315M-10电机为例,其额定功率Pn=55 kW,额定电压U=380 V, 同步转速n0=600 r/min,额定转差率sn=0.025,数值计算分析转速、转子电路中接入的电阻和电容3个参数对电轴系统耦合能力的影响,见图3。
从图3可知:电轴耦合能力对电机转速灵敏度较强,降低电机转速能提高平衡转矩;在RΩ<0.1 Ω,C<0.1 F区域,电轴耦合能力对电阻和电容灵敏度较弱,电阻与电容的变化基本不影响耦合能力;在RΩ<0.1 Ω,C<0.1 F区域内增大电阻与电容,对电轴耦合能力的影响效果是相反的:增大电阻,电轴耦合能力下降,而增加电容,耦合能力上升。调节电阻与电容均可改变系统耦合能力,但容抗不消耗有功功率,因此,在选定合理的电阻后,优先选择调节电容。
1.3 同步性能
2台YR315M-10绕线异步电机构成电气耦合系统。仿真不同负载时,在电磁平衡转矩作用下的系统同步能力如图4所示,图4中n1和n2 分别表示电机M1和M2 的转速。两电机在900 N・m负载下启动,在t=2 s时M2负载阶跃增加200 N・m,M1阶跃减小200 N・m。仿真结果表明:采用电轴系统,电机转速经过震荡调整后继续保持同步,同步能力强;增加串入电阻,速差与转矩差震荡加大,说明平衡能力下降;增加串入电容,速差与转矩差震荡减小,说明平衡能力增加,与理论分析结果一致。

图3 耦合能力的影响参数
Fig.3 Parameter sensitivity analysis of coupled ability
2 电气耦合轮对原理
耦合轮对左右轮因被耦合器连接,两车轮相对旋转受到约束。对于驱动独立车轮的左右电机构成电轴系统,在其制约下的两独立车轮转速不再任意,同样是存在一定的耦合关系,但这个耦合器不是机械实物,而是由无形的电磁场构成。因此,应用电轴技术于双电机拖动的独立车轮中,构成了一种新颖且简单的耦合轮对型式,即电气耦合轮对。
轻轨车辆采用独立轮技术,与传统刚性轮对一样存在横移与摇头的自由度,另外还有左、右轮的点头运动自由度。电机驱动的独立车轮轮对在曲线上运行时的动力学方程:
 (4)
(4)
式中: ;mw为轮对质量;Iy 和Iz分别为车轮绕y轴和z轴的转动惯量;βL和βR 分别为左右车轮的点头角;TL和TR 分别为左、右车轮的驱动力矩;f11和f22分别为纵向和横向蠕滑系数;yw为车轮横移量;Ψ为车轮摇头角;λ为车轮等效斜度;b为左、右车轮滚动圆横向跨距之半;v为车辆速度;R为曲线半径;r0为车轮半径;g为重力加速度;θc为超高角;kpy和kΨ分别为每轴箱横向和摇头刚度。采用双电机驱动的独立车轮,当引入电轴系统构成电气耦合轮对时,式(3)与式(4)之间存在如下关系:
;mw为轮对质量;Iy 和Iz分别为车轮绕y轴和z轴的转动惯量;βL和βR 分别为左右车轮的点头角;TL和TR 分别为左、右车轮的驱动力矩;f11和f22分别为纵向和横向蠕滑系数;yw为车轮横移量;Ψ为车轮摇头角;λ为车轮等效斜度;b为左、右车轮滚动圆横向跨距之半;v为车辆速度;R为曲线半径;r0为车轮半径;g为重力加速度;θc为超高角;kpy和kΨ分别为每轴箱横向和摇头刚度。采用双电机驱动的独立车轮,当引入电轴系统构成电气耦合轮对时,式(3)与式(4)之间存在如下关系:
 (5)
(5)
式中:p表示电机极对数;μc表示齿轮传动比(μc>1)。
将式(5)代入式(3)整理后得:
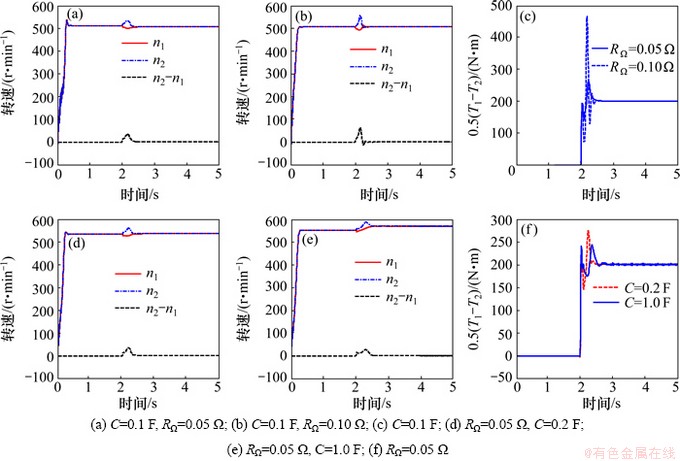
图4 不同负载下的电气耦合轮对同步性能
Fig.4 Coupled ability of ECW under different loads

 (6)
(6)
T是关于两车轮旋转机械转角差β的函数。因此,电气耦合轮对相当于独立车轮间加入了电磁耦合力矩,该力矩是机械转角差β的函数。当负载不同时,电磁耦合力矩将出现,自动调节电机驱动的左右车轮转速。耦合力矩与电机参数,齿轮减速比以及转子接入的阻抗相关。
3 电气耦合轮对车辆导向性能研究
3.1 轻轨车辆模型
采用MATLAB/Simulink建立轻轨车辆动力学模型,其数学表达式参考文献[13]中的附录2,参数值参考文献[14]中的附录D。采用EDCW和电气耦合轮对的2种模式车轮的车辆模型,EDCW耦合刚度与耦合阻尼分别为Kc=1 MN・m/rad,Cc=10 kN・m・s/rad;电气耦合轮对选择YR315M-10作为驱动电机,RΩ=0.05 Ω,C=0.1 F,电机直接驱动车轮。
3.2曲线通过性能
车辆以恒定速度40 km/h通过圆曲线半径为200 m,超高为0.09 m的线路。比较2种车辆各轮对通过相同线路的横移量与冲角,如图5所示。由图5可知:2种车辆各轮对伴随着横移与冲角通过曲线最终都复位到轨道中心线,说明具有自导向能力。横移与冲角数值接近,且均较小,说明具备曲线通过能力。
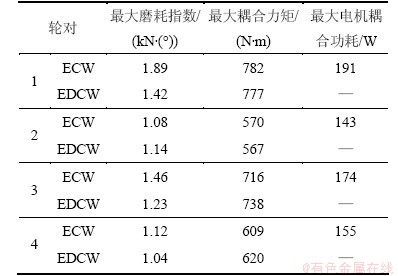
以轮轨横向力与冲角的乘积表示的磨耗指标反映轮对曲线通过性能,轻轨车辆4个轮对曲线通过时的性能见表1。由表1可知:2种轮对磨耗指数、最大耦合力矩数值相近,曲线通过能力相当;耦合系统具有较大的耦合力矩,使得轮对存在较大负载偏差时也能保持同步;驱动电机为产生耦合力矩而消耗的最大功率不超过200 W,能耗较低。
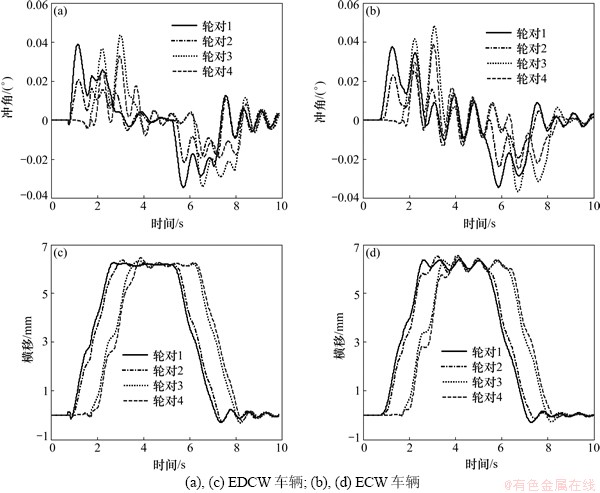
图5 2种轮对导向性能仿真比较
Fig.5 Steering behavior of LRV with ECW or EDCW
表1 轻轨车辆各轮对性能
Table 1 Wheelsets performance of LRV with ECW or EDCW
4 结论
1) 以转子串入电容的电轴系统驱动独立车轮,通过电机之间的电磁力矩实现车轮之间的耦合,形成一种电气耦合技术。通过驱动电机转子端串入电容,电阻等元件实现耦合,结构简单,可替代机械耦合方式。
2) 采用调节串入电容的方式控制耦合能力,系统耦合能力增强,经济、有效;采用ECW的车辆导向性能与EDCW的车辆导向性能相当,且电机因耦合而消耗的功率低。
参考文献:
[1] Benington C K. The railway wheelset and suspension unit as a closed-loop guidance control system: A method for performance improvement[J]. Journal of Mechanical Engineering Science, 1968, 10(2): 91-100.
[2] Dukkipati R V, Swamy S N, Osman M O M. Independently rotating wheel systems for railway vehicles: A state of the art review[J]. Vehicle System Dynamics, 1992 (21): 297-330.
[3] 池茂儒, 张卫华, 曾京, 等. 新型独立轮对柔性耦合径向转向架[J]. 机械工程学报, 2008, 44(3): 9-15.
CHI Maoru, ZHANG Weihua, ZENG Jing, et al. New flexible coupled radial bogie with independently rotating wheels[J]. Chinese Journal of Mechanical Engineering, 2008, 44(3): 9-15.
[4] 王欢, 戴焕云. 低地板轻轨车辆的技术分析与自主研发选型[J]. 中国铁路, 2009(10): 56-59.
WANG Huan, DAI Huanyun. Technical analysis, independent development and type selection of low floor rail vehicle[J]. Chinese Railways, 2009(10): 56-59.
[5] 赵明花. 低地板车辆的研制[J]. 都市快轨交通, 2010, 23(5): 13-16.
ZHAO Minghua. Development and manufacture of low-floor vehicles[J]. Urban Rapid Rail Transit, 2010, 23(5): 13-16.
[6] 刘志刚. 100%低地板车牵引传动系统研究及装备研制[J]. 都市快轨交通, 2010, 23(5): 17-21.
LIU Zhigang. Research on traction drive system for 100% low-floor vehicles and relevant equipment[J]. Urban Rapid Rail Transit, 2010, 23(5): 17-21.
[7] Perez J, Busturia J M, Mei T X, et al. Combined active steering and traction for mechatronic bogie vehicles with independently rotating wheels[J]. Annual Reviews in Control, 2004, 28(2): 207-217.
[8] 任利惠, 周劲松, 沈钢. 采用轮毂电机的独立车轮轮对的主动导向控制[J]. 中国铁道科学, 2010, 31(5): 78-82.
REN Lihui, ZHOU Jinsong, SHEN Gang. The active steering control of the independently wheelset with the hub motors[J]. China Railway Science, 2010, 31(5): 78-82.
[9] SUN Xiaojie, LU Zhenggang, ZHOU Wenxiang. A new coupled wheelsets of railway vehicles[C]// Proceedings of the 22nd IAVSD Symposium. Manchester: Mancherster Metropolitan University, 2011: 1-6.
[10] 孙效杰, 陆正刚, 周文祥. 轨道车辆电气耦合轮对导向机理与仿真[J]. 中国机械工程, 2013, 24(7): 970-974.
SUN Xiaojie, LU Zhenggang, ZHOU Wenxiang. Oriented mechanism and simulation for electrical coupled wheelsets of railway vehicles[J]. Chinese Mechanical Engineering, 2013, 24(7): 970-974.
[11] 顾绳谷. 电机及拖动基础: 下册[M]. 4版. 北京: 机械工业出版, 2007: 179-181.
GU Shenggu. Fundamentals of Electrical Machines and Drives[M]. 4ed. Beijing: China Machine Press, 2007: 179-181.
[12] Akayleh A, Abdallah S. The systems of synchronous rotation in the base of electromagnetic working shaft with insertion capacitances in the rotor coils[J]. Jordan Journal of Applied Science (Natural Sciences), 2005, 7(1): 1-10.
[13] 张丽平, 李芾. 弹性阻尼耦合轮对铁路客车系统横向稳定性分析[J]. 交通运输工程学报, 2002, 2(1): 13-19.
ZHANG Liping, LI Fu. Lateral stability behavior of railway passenger car system with elasto-damper coupled wheelset[J]. Journal of Traffic and Transportation Engineering, 2002, 2(1): 13-19.
[14] 任利惠. 独立车轮导向技术研究[D]. 上海: 同济大学铁道与城市轨道交通研究院, 2006: 147.
REN Lihui. The study on method to enhancing steering capability of independently rotating wheels[D]. Shanghai: Tongji University. Institute of Railway and Urban Mass Transit, 2006: 147.
(编辑 杨幼平)
收稿日期:2013-09-25;修回日期:2013-12-21
基金项目(Foundation item):科技部科技支撑计划项目(2009BAG11B02) (Project (2009BAG11B02) supported by National Key Technology R & D Program of Ministry of Science and Technology of China)
通信作者:孙效杰(1984-),男,安徽亳州人,博士研究生,从事轨道车辆系统动力学与控制研究;电话:021-69583693;E-mail: sxjlm2003@163.com

