DOI: 10.11817/j.issn.1672-7207.2019.02.010
»щУЪOpenFOAMЦШБ¦КЅІЙСщЖчЧФУЙПВВдЧЛМ¬КэЦµ·ЦОц
ВнХЬ1Ј¬їЧµ¤СЕ1Ј¬НхШ·2Ј¬µФёЦѕь1
(1. ґуБ¬Ан№¤ґуС§ єЈ°¶ј°ЅьєЈ№¤іМ№ъјТЦШµгКµСйКТЈ¬БЙДю ґуБ¬Ј¬116024Ј»
2. ґуБ¬Ан№¤ґуС§ СТНБ№¤іМСРѕїЛщЈ¬БЙДю ґуБ¬Ј¬116024)
ХЄТЄЈєОЄБЛМбёЯЙоЛ®ЦШБ¦КЅіБ»эОпІЙСщЖчФЪєЈБчЎўАВЙюµИНвБ¦ЧчУГПВµДІЙСщР§ВКЈ¬»щУЪOpenFOAMіМРтІўНЁ№э¶ЇМ¬ЦШµюНшёс·Ѕ·ЁЈ¬ДЈДвѕІЛ®ЦРІЙСщЖчФЪґҐµЧЗ°ЅПґу·¶О§ДЪЧФУЙПВВдК±µДЧЛМ¬ЎЈКЧПИ№№ЅЁІЙСщЖчУлБчМеП໥ЧчУГИэО¬К±УтсоєПјЖЛгДЈРНЈ¬ІўІЙУГNewmark·Ё¶ФЅб№№ФЪБчіЎЦРµДФЛ¶Ї·ЅіМЅшРРµьґъЗуЅвЈ»СйЦ¤НшёсКХБІРФЈ¬·Ц±р¶ФіхКјЗгЅЗОЄ0ЎгєН5ЎгµДІЙСщЖчЧФУЙПВВдЧЛМ¬ЅшРРК±УтДЈДвЈ¬·ЦОцПВВдѕаАлЎўПВВдЛЩ¶ИТФј°ІЙСщЖчЖ«ЧЄЅЗЦ®јдµДП໥№ШПµІўСРѕїІЙСщЖчµДЖ«ЧЄЅЗ¶ФИЎСщР§ВКµДУ°ПмЎЈСРѕїЅб№ы±нГчЈє±ѕОД№№ЅЁµДЅб№№УлБчМеП໥ЧчУГµДИэО¬К±УтјЖЛгДЈРНїЙТФѕ«И·ДЈДвІЙСщЖчЧФУЙПВВдЧЛМ¬Ј»ІЙСщЖчµДіхКјЖ«ЧЄЅЗ¶ФІЙСщЖчПВВдЧЛМ¬ТФј°ИЎСщР§ВКѕщУРЅПґуУ°ПмЎЈ
№ШјьґКЈєЦШБ¦КЅіБ»эОпІЙСщЖчЈ»ЧФУЙПВВдЧЛМ¬Ј»Бч№МП໥ЧчУГЈ»OpenFOAMіМРтЈ»ЦШµюНшёс
ЦРНј·ЦАаєЕЈєP751 ОДПЧ±кЦѕВлЈєA ОДХВ±аєЕЈє1672-7207(2019)02-0321-07
Simulation analysis of free falling posture of gravity sampling device using OpenFOAM
MA Zhe1, KONG Danya1, WANG Yin2, ZHAI Gangjun1
(1. State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116024, China;
2. Institute of Geotechnical Engineering, Dalian University of Technology, Dalian 116024, China)
Abstract: In order to improve sampling efficiency of gravity sampler in deep water under complicated environment conditions such as sea current and cable, the free falling posture of sampler among a wide range before its grounding was simulated based on OpenFOAM program and dynamic overset grid method. Three-dimensional time-domain coupled calculation model of the sampler which interacts with flow field was established. The Newmark method was used to solve the motion equations of the structure iteratively in the flow field. After verification of the grid convergence, the free falling postures of sampler with initial slant angle of 0Ўг and 5Ўг were simulated and the relationships among falling distance, falling speed and slant angle of the sampler were analyzed. In the end, the influence of the slant angle on the sampling rate was studied. The results show that the proposed three-dimensional time-domain coupled calculation model can predict the free falling posture accurately. The initial slant angle has great influence on falling posture and sampling rate of sampler.
Key words: gravity sediment sampler; free falling posture; fluid-structure interaction; OpenFOAM program; overset grid
ЅьДкАґЈ¬ЙоєЈЧКФґМЅІвјјКхПтёЯѕ«¶ИЎўґуЙо¶ИЎўЅьєЈµЧєНФО»·ЅПт·ўХ№Ј¬ї±МЅУлК¶±рЎў±ЈХжИЎСщјјКхЎўЧКФґ·¶О§И¦¶ЁєНЧКФґБїУРР§ЖАјЫСРѕїКЗЙоєЈєЈµЧїуІъЧКФґї±ІйјјКхµД·ўХ№ЗчКЖєНЦШµг[1]ЎЈДїЗ°Ј¬ЙоЛ®ЦШБ¦КЅіБ»эОпІЙСщЖчТСѕіЙОЄЙоєЈї±ІвЦРµДЦШТЄЙи±ёЈ¬Ль»сИЎµДєЈґІ±нІгНБСщ¶ФєЈµЧїуІъЧКФґї±МЅЎўєЈС󹤳̵ШЦКї±ІмЎўїЖС§СРѕїЎў№ъјТИЁТжО¬»¤ЎўѕьКВУ¦УГµИ¶јУРЦШТЄТвТе[2]ЎЈЦШБ¦КЅІЙСщЖчЦчТЄТАїїЧФЙнЦКБїПВВдІў№бИлНБЦРИЎµГіБ»эОпСщ±ѕЈ¬ТтЖ乤ЧчФАнјтµҐЎўіЙ±ѕЅПµНЎў¶ФёЁЦъЙи±ёТЄЗуІ»ёЯЈ¬ККУГУЪЛ®ЙоОЄ800~6 000 mµДЙоєЈДаЙііБ»эОпµДИЎСщЎЈµ«КЗЈ¬ЦШБ¦КЅІЙСщЖч¶Ф№бИлНБМеЗ°µДПВВдЧЛМ¬УИЖдКЗґҐµЧК±єтµДЗгЅЗ±ИЅПГфёРЈ¬Ц±ЅУУ°ПмєЈґІіБ»эОпИЎСщЦКБїУлИЎСщЖчµД°ІИ«ЎЈЦШБ¦»оИыКЅИЎСщЖч[3]КЗДїЗ°К№УГ·¶О§Чо№гµДЙоєЈіБ»эОпИЎСщЧ°ЦГЈ¬ґъ±нІъЖ·УРГА№ъWHOI(Woods Hole Oceanographic Institution)СРЦЖµДGiant Piston CorerЈ¬Jumbo Piston CorerєН Long CoringТФј°·Ё№ъIFRTP(French Institute for Austral Research and Technology)СРЦЖµДCALYPSOИЎСщЖчЎЈЖдЦРЈ¬CALYPSOИЎСщЖчЧчОЄµ±ЅсКАЅзЙПИЎСщі¤¶ИЧоі¤µДИЎСщЧ°ЦГЈ¬»сИЎБЛі¤ОЄ64.5 mµДЙоєЈіБ»эСщЖ·Ј¬µ«ЖдПµНіЧоґуЧФЙнЦКБїТІі¬№эБЛ10 t[4]ЎЈОТ№ъґУ20КАјН70ДкґъїЄКјСРЦЖіБ»эОпИЎСщЙи±ёЎЈФЪТСУРјтµҐЦШБ¦ИЎСщЖчЙијЖФАнµД»щґЎЙПЈ¬ЛО»¶БдµИ[5]СРЦЖБЛТ»ЦЦ°ІИ«ЦШБ¦»оИыИЎСщЖчЎЈѕ№эЛДОеК®ДкµД·ўХ№Ј¬ІЙСщЖчЅб№№ј°ІЩЧч·Ѕ·ЁІ»¶П±»ёДЅшЎЈІ№јТОдµИ[6]ґУєЈµЧИЎСщµДТвТеєНИЎСщЖчµД·ЦАаИлКЦ, ІыКцБЛєЈµЧИЎСщЖчµД·ўХ№ПЦЧґј°Ж乤ЧчФАнЈ»ХЕЗмБ¦µИ[7]К№УГFLUENTИнјю¶ФІЙСщ№эіМЅшРРБЛДЈДв·ВХжЈ¬·ўПЦФЪПВВдёЯ¶ИЧг№»ґуК±Ј¬ІЙСщЖчЧІ»чєЈµЧµДЛЩ¶ИЗчУЪОИ¶ЁЈ»CHENµИ[8]МбіцБЛІЙСщЖчµ¶Н·ЗРёоДаНБК±µДДЬБїПыєД№«КЅЈ¬¶ЕРЗµИ[3]ФЪґЛ»щґЎЙПНкЙЖБЛ№бИлЙо¶ИµДјЖЛ㹫ʽЈ»ОДФуѕьµИ[9]НЁ№э¶ФЦШБ¦КЅІЙСщЖчіе»чПµНіЅшРРЅЁДЈєНКэЦµјЖЛгЈ¬·ЦОцБЛЖдИЎСщРФДЬєНУ°Пм№бИлЙо¶ИµДТтЛШЈ¬ИзЕдЦШЎўіе»чёЯ¶ИЎўИЎСщ№ЬЦ±ѕ¶ЎўіБ»эОпМШРФµИЎЈ2013ДкЈ¬ОТ№ъАыУГЧФјєЙијЖµДЦШБ¦»оИыИЎСщЖчІЙµГБЛі¤¶Иґп10.9 mµДЦщЧґСщЖ·[10]ЎЈЦШБ¦КЅІЙСщЖчДїЗ°ґжФЪИзПВОКМвЈєЧФЙнЦКБї№эґуЎўСщЖ·±ЈХж¶ИІ»ёЯЈ¬МШ±рКЗФЪК№УГ№эіМЦРКЬєЈБчЎўґ¬І°ЖЇТЖЎўµШРОЖр·ьµИТтЛШµДУ°ПмЈ¬ИЭТЧФЪИлНБК±№э¶ИЗгР±ЙхЦБНПµ№Ј¬ХвР©ОКМвФЪЙоєЈЛ®УтУИОЄН»іцЈ¬»бµјЦВІЙСщР§№ыІ»АнПлЙхЦБУ°ПмК№УГ°ІИ«[11-13]ЎЈІЙСщЖчФЪґҐµЧЗ°µДЧФУЙПВВд№эіМЦРЈ¬°йЛжЧЕЅПёґФУµДНвІїєЙФШМхјюј°ОІБчУ°ПмЎЈґ¦АнґЛАаБчМеУлЅПґу·¶О§ДЪФЛ¶ЇµДЅб№№Ц®јдµДП໥ЧчУГОКМвЈ¬НЁіЈІЙУГКэЦµДЈДвЈ¬ДЈРНКµСйј°КµµШІвБїµИСРѕїКЦ¶ОЎЈЖдЦРЈ¬Хл¶ФЙоЛ®ЦШБ¦КЅІЙСщЧ°ЦГµДДЈРНКµСйНщНщКЬіЎµШПЮЦЖЅПґуЈ¬ОЮ·ЁФЪККµ±±ИАэМхјюПВїЄХ№Ј»КµµШІвБїіЙ±ѕј°І»И·¶ЁТтЛШЅП¶аЈ¬НЁіЈІ»ДЬЅшРРПµНіСРѕїЎЈ¶шІЙУГ»щУЪјЖЛгБчМеБ¦С§·Ѕ·ЁµДїЄФґіМРтOpenFOAM¶ФІЙСщЖчЧФУЙПВВд№эіМЦРµДЧЛМ¬ЅшРРКµК±КэЦµДЈДвЈ¬ЖдЅб№ыїЙТФЅПХжКµµШ·ґУіІЙСщЖчµД¶ЇБ¦МШРФЎЈФЪOpenFOAMіМРтЦРЈ¬іЈУГµД¶ЇНшёс·Ѕ·ЁУРНшёсЛжМе±дРО·ЁЎў»¬ТЖНшёс·ЁµИЈ¬µ«Ц»УРЦШµюНшёсДЬ№»ЅПєГµШККУ¦ОпМе¶аЧФУЙ¶ИЎўґу±дРОФЛ¶Ї[14]Ј¬ТтґЛЈ¬Чоіх±»У¦УГУЪєЅїХєЅМмБмУтЦРїХЖш¶ЇБ¦С§СРѕї[15]ЎЈBOGERµИ[16]ЧоПИФЪOpenFOAMіМРтЦРКµПЦБЛЦШµюНшёс·Ѕ·ЁЎЈЅьДкАґЈ¬ЦШµюНшёсТІ±»У¦УГУЪєЈС󹤳̷ЅГжЎЈІЬєйЅЁµИ[17]АыУГЦШµюНшёсЅЁБўБЛИэО¬КэЦµЛ®іШЈ¬ѕЯУРЅПёЯµДѕ«¶ИЈ»CHANDAR[18]ФЪOpenFOAMЖЅМЁЦРАыУГИэО¬·ЗЅб№№»Ї¶ЇМ¬ЦШµюНшёсСйЦ¤БЛФЛ¶ЇОпМеµДБчіЎ±д»ЇЗйїцЈ»НхЅЁ»ЄµИ[19]ІЙУГOpenFOAM єНЦШµюНшёсјјКх»сµГБЛґ¬І°І»Н¬№¤їцПВµДЧиБ¦ЎўІаПтБ¦єНЧЄКЧБ¦ѕШµДК±іМЗъПЯЈ¬СйЦ¤БЛІЙУГµ±З°ґ¦Ан·Ѕ·ЁКэЦµЗуЅвґїТЎКЧФЛ¶ЇµДїЙїїРФЎЈЧЫЙПЛщКцЈ¬ЦШБ¦КЅІЙСщЖчµДІЙСщіЙ№¦ВКІўІ»ёЯЈ¬іЈіцПЦСщЖ·і¤¶ИОЮР§ЙхЦБСщЖ·КэѕЭ¶ЄК§µДЗйїцЎЈДїЗ°СРѕїХЯµДСРѕїЦчТЄјЇЦРФЪ№бИл№эіМЦРІЙСщЖчУлНБМеµДП໥ЧчУГј°±ЈХжВКµИ·ЅГжЈ¬¶ш¶ФІЙСщЖчґҐµЧЗ°ЧФУЙПВВдЅЧ¶ОіхКј±ЯЅзМхјюј°ІЙСщЖчПВВдЧЛМ¬µИТтЛШСРѕїЅПЙЩЎЈТтґЛЈ¬±ѕОДЧчХЯ»щУЪOpenFOAMіМРтЈ¬ІЙУГЦШµюНшёсјјКхЈ¬¶ФЙоєЈЦШБ¦КЅІЙСщЖчФЪІ»Н¬іхКј±ЯЅзМхјюЧФУЙПВВдЅЧ¶ОµДЧЛМ¬ЅшРРДЈДвЈ¬СРѕїПВВдѕаАлЎўґҐµЧК±ІЙСщЖчЗгР±ЅЗ¶ИµИТтЛШ¶ФІЙСщР§ВКµДУ°ПмЈ¬ТФЖЪЅЪКЎІЙСщК±јдУліЙ±ѕЈ¬МбёЯІЙСщР§ВКЎЈ
1 »щ±ѕАнВЫ
1.1 КэЦµ·Ѕ·Ё
¶ФУЪІ»їЙС№Лхр¤РФБчМеЈ¬їШЦЖ·ЅіМОЄБ¬РшРФ·ЅіМј°¶ЇБї·ЅіМ(Navier-Stokes·ЅіМ)Ј¬Жд±нґпКЅИзПВЈє
 ЎЎ ЎЎЎЎ (1)
ЎЎ ЎЎЎЎ (1)
 (2)
(2)
КЅЦРЈєuєНP·Ц±рОЄБчМеЛЩ¶ИєНС№Б¦КёБїЈ»tОЄК±јдЈ»¦СєН¦Ф·Ц±рОЄБчМеГЬ¶ИУлФЛ¶Їр¤¶ИЈ¬±ѕОДЦРЛ®µДГЬ¶И¦С=1 000 kg/m3Ј¬¦Ф=1.0ЎБ10-6 m2/sЈ» ОЄМЭ¶ИЛгЧУЎЈ
ОЄМЭ¶ИЛгЧУЎЈ
±ѕОДІЙУГk-¦ЕНДБчДЈРНАґСРѕїНДБчµДУ°ПмЈ¬µ±Бч¶ЇІ»їЙС№Ј¬ЗТІ»їјВЗФґПоК±Ј¬¶ЁТеНД¶ЇДЬkУлєДЙўВК¦ЕµДКдФЛ·ЅіМОЄ[20]
 (3)
(3)
 (4)
(4)
КЅЦРЈєxiєНxjОЄЧш±к·ЦБїЈ»uiєНujОЄЛЩ¶И·ЦБїЈ»¦МОЄ·ЦЧУр¤РФПµКэЈ»¦МkОЄНД¶Їр¤¶ИЈ»GkОЄНД¶ЇДЬkµДІъЙъПоЈ»ёчіЈКэC1¦Е=1.44Ј¬C2¦Е=1.92Ј¬C¦М=0.09Ј¬¦Тk=1.0Ј¬¦Т¦Е=1.3ЎЈ
ІЙУГNewmark·Ѕ·ЁЗуЅвФЛ¶Ї·ЅіМЎЈёш¶ЁіхКјЦµu0Ј¬ єН
єН Ј¬И·¶ЁК±јдІЅі¤¦¤t єНІОКэ¦БєН¦ВЈ¬УЙ
Ј¬И·¶ЁК±јдІЅі¤¦¤t єНІОКэ¦БєН¦ВЈ¬УЙ
 (5)
(5)
 (6)
(6)
јґїЙЗуµГt+¦¤tК±їМµДОпМеµДО»ТЖЎўЛЩ¶ИЎўјУЛЩ¶ИЎЈЦШёґТФЙП№эіМЈ¬ѕНїЙµГµЅХыёцК±јд¶ОДЪµДОпМеµДО»ТЖЎўЛЩ¶ИєНјУЛЩ¶ИЎЈЖдЦРЈ¬¦ВИЎ0.25Ј¬јґІЙУГПЯРФјУЛЩ¶И·ЁЎЈ
1.2 ј«ПЮЛЩ¶И
ІЙСщЖчФЪєЈЛ®ЦРПВВдК±ЦчТЄµДЧчУГБ¦УРЦШБ¦ЎўёЎБ¦єНєЈЛ®НПТ·Б¦ЎЈУЙУЪЅьєЈµЧґ¦єЈБчЛЩ¶ИјёєхОЄ0 m/sЈ¬ЛщТФЈ¬ФЭІ»їјВЗєбПтµДєЈБчБ¦ЧчУГЎЈЖдЦРЈ¬ІЙСщЖчµДЦШБ¦јхИҐЖдФЪЛ®ЦРЛщКЬµДёЎБ¦ОЄУРР§ЦШБ¦Gy(УЦіЖёЎИЭЦШ)ЎЈ
 (7)
(7)
КЅЦРЈєGОЄЧФЦШБ¦Ј»FОЄёЎБ¦Ј»VОЄІЙСщЖчµДМе»эЈ»mОЄІЙСщЖчЦКБїЈ»gОЄЦШБ¦јУЛЩ¶ИЎЈ
НПТ·Б¦АаЛЖУЪИЖБчЧиБ¦Ј¬№КНПТ·Б¦FDїЙТФ°ґИЖБчЧиБ¦јЖЛг[21]Јє
 (8)
(8)
КЅЦРЈєdsОЄІЙСщЖчЦ±ѕ¶Ј»¦СwОЄєЈЛ®ГЬ¶ИЈ¬ИЎЦµОЄ1.028ЎБ103kg/m3Ј»CDОЄІЙСщЖчФЪєЈЛ®ЦРµДНПТ·ЧиБ¦ПµКэЈ»AFОЄІЙСщЖчГж»эЈ»vОЄІЙСщЖчФЪєЈЛ®ЦРµДПВВдЛЩ¶ИЎЈЛжЧЕІЙСщЖчЛЩ¶ИФцґуЈ¬ЖдЧиБ¦ТІЅ«ФцґуЎЈУЙґЛµГіцПВВдЛЩ¶ИvУлПВВдѕаАлxµД№ШПµКЅОЄ[22]
 (9)
(9)
КЅЦРЈєv0ОЄіхЛЩ¶ИЈ» Ј»
Ј» Ј»
Ј» ОЄІЙСщЖчµДГЬ¶ИЎЈµ±ПВВдёЯ¶ИЧг№»ґујґxЎъЎЮК±Ј¬ІЙСщЖчµДЦШБ¦УлЧиБ¦Ѕ«ґпµЅЖЅєвЈ¬јґґпµЅј«ПЮЛЩ¶И
ОЄІЙСщЖчµДГЬ¶ИЎЈµ±ПВВдёЯ¶ИЧг№»ґујґxЎъЎЮК±Ј¬ІЙСщЖчµДЦШБ¦УлЧиБ¦Ѕ«ґпµЅЖЅєвЈ¬јґґпµЅј«ПЮЛЩ¶И [23]
[23]
 (10)
(10)
1.3 №бИлЙо¶И
№бИлЙо¶ИИЎѕцУЪєЈµЧµДУІ¶ИєНИЎСщЖчµДЅб№№РОЧґУлЕдЦШЈ¬ИЎСщЖчХыёцФЛ¶Ї№эіМїЙїґЧчКЗІ»Н¬ДЬБїјдµДЧЄ»»Ј¬ЧсСДЬБїКШєгФАнЎЈїјВЗЦШБ¦КЖДЬЎў¶ЇДЬЎўДЪ±ЪД¦ІБЧч№¦ЎўНв±ЪД¦ІБЧч№¦єНµ¶Н·ЗРёоЧч№¦Ј¬ФЭІ»їјВЗНПЧ§Б¦Чч№¦ЎЈёщѕЭДЬБїКШєгЈ¬ґУИЎСщЖчіхКјЅУґҐіБ»эОпЦБИЎСщЖч№бИлЧоґуЙо¶ИІўѕІЦ№Ј¬ДЬБї·ЅіМОЄ
Ep+Ek-Wi-Wo-Wc=0 (11)
КЅЦРЈєEpОЄЦШБ¦КЖДЬЈ»EkОЄ¶ЇДЬЈ»WiОЄИЎСщ№ЬДЪ±ЪД¦ІБЛщЧчµД№¦Ј»WoОЄИЎСщ№ЬНв±ЪД¦ІБЧч№¦Ј»WcОЄµ¶Н·ЗРёоЛщЧчµД№¦ЎЈ
¶ЕРЗµИ[24]µДСРѕї±нГчЈєФЪИ·¶ЁІЙСщЖчЦКБїЎўДЪНвЦ±ѕ¶ЎўД¦ІБТтКэµИІОКэєуЈ¬јґїЙИ·¶ЁИлНБЗ°ЛЩ¶ИУл№бИлЙо¶ИµД№ШПµЈє


 (12)
(12)
КЅЦРЈєlОЄ№бИлЙо¶ИЈ»¦БcОЄµ¶Н·Д¦ІБТтКэЈ»¦БiОЄДЪ±ЪД¦ІБТтКэЈ»¦БoОЄНв±ЪД¦ІБТтКэЈ»JsОЄІа±Ър¤ЦНЧиДбТтЧУЈ»DoОЄНв±ЪЦ±ѕ¶Ј»DiОЄДЪ±ЪЦ±ѕ¶Ј»DcОЄµ¶Н·Нвѕ¶Ј»¦ИОЄµ¶Н·Ѕ»ЅЗЎЈ
1.4 ЦШµюНшёс
ЦШµюНшёсЛгАэРиТЄ2Ії·ЦНшёсЈєµЪ1їйКЗ°ьО§ОпМеµДМщМеНшёсЈ¬µЪ2їйКЗХэЅ»µД±іѕ°НшёсЎЈФІЦщНшёсЗ¶МЧФЪ±іѕ°НшёсЦ®ЦРЎЈ2їйНшёсЦ®јдП໥¶АБўЈ¬ФЪНШЖЛЅб№№ЙПГ»УРФјКш№ШПµЎЈМщМеНшёсїЙТФФЪ±іѕ°НшёсЦ®ЦРИОТвТЖ¶ЇЎЈФЪХыёцјЖЛг№эіМЦРЈ¬ѕЎ№ЬОпМеІъЙъБЛґу·щ¶ИµДО»ТЖЈ¬µ«2їйНшёсІўГ»УР·ўЙъ±дРОЈ¬ЅцЅцКЗ2ёцНшёсµДПа¶ФО»ЦГ·ўЙъБЛ±д»Ї[15]ЎЈ
ЅшРРЦШµюНшёсјЖЛгКЧПИРиТЄЅшРР¶ґµҐФЄЛСС°Ј¬јґЅ«ФЪјЖЛгУтЦ®НвµДНшёс±кјЗОЄ¶ґµҐФЄЈ¬ІўЕЕіэФЪБчіЎјЖЛгЦ®НвЎЈЦ®єуРиТЄёшІеЦµ±ЯЅзµҐФЄґУБнТ»їйНшёсЦРЛСС°№±ПЧµҐФЄЈ¬јґ±іѕ°НшёсµДІеЦµ±ЯЅзµҐФЄРиТЄґУФІЦщНшёсЦРЛСЛч№±ПЧµҐФЄЈ¬ФІЦщНшёсµДІеЦµ±ЯЅзµҐФЄРиТЄґУ±іѕ°НшёсЦРЛСЛч№±ПЧµҐФЄЎЈФЪјЖЛгІеЦµПµКэєНУЕ»ЇЦШµюЗшУтєуЈ¬јґїЙЅшРРКэЦµјЖЛгЎЈ
2 КэЦµДЈДвСйЦ¤
2.1 НшёсКХБІРФСйЦ¤
ОЄБЛСйЦ¤ЦШµюНшёсјЖЛгµДЧјИ·РФЈ¬КЧПИ¶ФРОЧґЅПОЄјтµҐµДЗтМеФЪЛ®ЦРµДЧФУЙПВВдЅшРРКэЦµДЈДвЈ¬ІОХХОДПЧ[25]ЅЁБўДЈРНЈ¬ИзНј1ЛщКѕЎЈ

Нј1 ЗтМеДЈРНј°Ншёс»®·Ц
Fig. 1 Sphere model and grid partition
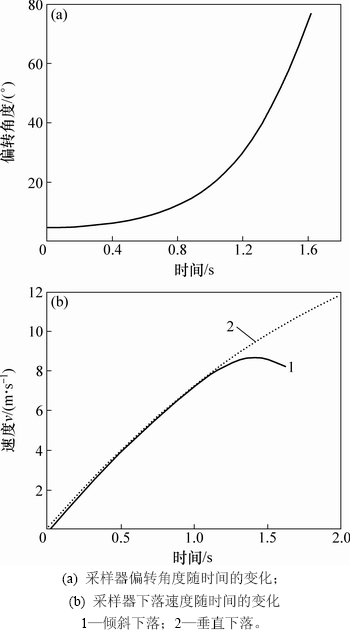
Нј1ЦРЗтМе°лѕ¶ОЄ0.04 mЈ¬ГЬ¶ИОЄ7 850 kg/m3Ј¬ЗтМеНвІїОЄі¤ЎБїнЎБёЯОЄ0.2 mЎБ0.2 mЎБ0.2 mµДМщМеНшёсЎЈЧоНвІг»№УРЛ®ІЫјЖЛгУтЈ¬Л®ЖЅПт2ёцО¬¶ИѕщОЄ0.5 mЈ¬КъЦ±·ЅПтОЄ8 mЈ¬јЖЛгУтµД6ёцГжѕщОЄ±ЪГж±ЯЅзЎЈЛ®ІЫєНОпМе±нГжѕщІЙУù⻬ОЮ»¬ТЖ±ЪГж±ЯЅзМхјю(wall)Ј¬ОпМеНшёсІЙУГЦШµюНшёс(overset)ЎЈБчМе¶ЇБ¦р¤¶ИПµКэОЄ1.003ЎБ10-3 PaЎ¤sЎЈХл¶ФЙПКцДЈРНЈ¬СРѕїІ»Н¬Ншёс±Яі¤ПВЗтМеФЪѕІЛ®ЦРЧФУЙПВВдЛЩ¶ИЛжК±јдµД±д»ЇЈ¬І»Н¬Ншёс±Яі¤ј°ЖдЅб№ы¶Ф±Ијы±н1ЎЈ
ґУ±н1їЙТФїґіцЈєЛжЧЕНшёсКэБїФцјУЈ¬A2єНA3КэЦµДЈДвµГµЅµДЧиБ¦ПµКэУлОДПЧ[26]ЦРµДКµСйЅб№ы(ЧиБ¦ПµКэОЄ0.429 8)Іо±рЅПРЎЎЈЗтМеДЈРНµДНшёсКэЅПЙЩЈ¬ЗТОЄѕІЛ®ЦРµДЧФУЙПВВдЈ¬µ«ґУѕЯМеµДјЖЛгК±јдАґїґЈ¬A2НшёсµДјЖЛгК±јдФјОЄ32 hЈ¬¶шA3ґпµЅ57 hЎЈїЙТФФ¤јЖЈ¬ФЪєуЖЪЅшТ»ІЅСРѕїЦРЈ¬¶ФУЪЅб№№ёьёґФУЎўНшёсКэёь¶аµДІЙСщЖчДЈРНЈ¬јЖЛгєДК±Ѕ«ЅшТ»ІЅФцјУЎЈТтґЛЈ¬ОДЦРФЪ±ЈЦ¤јЖЛгЧјИ·РФµДН¬К±Ј¬їјВЗµЅјЖЛгЧКФґµДПЮЦЖЈ¬СЎИЎЛгАэ A2 ЦРµДНшёсЧчОЄјЖЛгНшёсЎЈІ»Н¬Ншёс±Яі¤ПВµДЗтМеЛЩ¶И±д»ЇјыНј2ЎЈУЙНј2їЙЦЄЈєЗтМеФЪПВВд№эіМЦРЛЩ¶ИІ»¶ПФцґуЈ¬ЧЬМеЅб№ы№эіМУлКЅ(9)µДАнВЫЅб№ыТ»ЦВЎЈ
±н1 І»Н¬Ншёс±Яі¤КэЦµДЈДвЅб№ы¶Ф±И
Table 1 Comparison of simulation results of meshs with different sizes

Нј2 І»Н¬Ншёс±Яі¤ПВµДЗтМеЛЩ¶И±д»Ї
Fig. 2 Change of the sphere velocity in different meshs
2.2 ІЙСщЖчЧФУЙПВВдµДКэЦµДЈДв
ІЙСщЖчКµјК№¤ЧчЦРТ»°г·ЦОЄ3ёцЅЧ¶ОЈєґУґ¬І°ПВ·ЕЦБЛ®ЦРµДИлЛ®№эіМЈ»ФЪАВЙюЗЈТэј°єЈБчЧчУГµИ»·ѕіМхјюµДФјКшПВВд№эіМЈ»ПВВдЦБѕаАлєЈµЧТ»¶ЁёЯ¶ИК±Ј¬ИЎСщЖчЧФУЙПВВдЦ±ЦБЅУґҐєЈµЧµД№эіМЎЈ±ѕОДЅиЦъЦШµюНшёс·Ѕ·ЁЅшРРКэЦµДЈДвЈ¬ЦШµг¶ФІЙСщЖчЧФУЙПВВд№эіМЅшРРФЛ¶ЇПмУ¦·ЦОцЎЈґЛНвЈ¬єЈБчЦчТЄЧчУГУЪЗЈТэПВВдЅЧ¶ОµДАВЙюЈ¬К№µГІЙСщЖчФЪЧФУЙПВВдЅЧ¶ОїЄКјК±ІъЙъЗгЅЗЈ¬¶шЧФУЙПВВдЅЧ¶ОК±ґ¦УЪЅУЅьєЈµЧµДЙоєЈ»·ѕіЦРЈ¬ґЛК±µДєЈБчµДЧчУГЅПИхЎЈТтґЛЈ¬±ѕОДЙиЦГІЙСщЧ°ЦГФЪѕІЛ®ЦРЧФУЙПВВдЎЈ
ОЄЅшТ»ІЅСйЦ¤КэЦµДЈДвµДЧјИ·РФЈ¬ІЙСщЖчµДКэЦµДЈРНІОїјОДПЧ[8]ЦРµДЦШБ¦КЅІЙСщЖчІОКэЙијЖЈ¬ЧЬЦКБїОЄ1.5 tЈ¬ИЎСщ№Ьі¤ОЄ4 mЈ¬Нвѕ¶ОЄ105 mmЈ¬ЦРІїУРЕдЦШїйТФФцјУІЙСщЖчЧФЙнµДЦКБїЎЈК№УГICEMИнјюЅЁБўјт»ЇµДДЈРНІў»®·ЦНшёсЈ¬ИзНј3ЛщКѕЎЈ

Нј3 ЦШБ¦КЅІЙСщЖчДЈРНј°Ншёс»®·Ц
Fig. 3 Model of gravity sampler and grid partition
УЙОДПЧ[8]їЙЦЄЈєЦШБ¦КЅІЙСщЧ°ЦГПВВдµДіхЛЩ¶ИОЄ0 m/sЈ¬ФЪЅьєЈµЧґ¦ѕ№эФј12 mµДЧФУЙПВВд№эіМєу№бИлНБЦРЈ¬·ВХжІОКэУлКµјККµСйМхјюЅПОЗєПЎЈЅ«ІЙСщЖчПВВд№эіМЦРЛЩ¶ИУлО»ТЖµДДЈДвјЖЛгЅб№ыУлОДПЧ[8]ЦРТСУРµДКµІвЅб№ыЅшРР¶Ф±И·ЦОцЈ¬ИзНј4ЛщКѕЎЈ
УЙНј4їЙЦЄЈєФј1.25 sєуЈ¬ІЙСщЖчµДПВВдѕаАлОЄ6 mЈ¬ЛЩ¶ИґпµЅ9 m/sЎЈКµІвКэѕЭЦРІЙСщЖчФЪФј1.6 sК±ґҐµЧІъЙъБЛ»ШµЇЈ¬јУЛЩ¶ИµД·ЅПт·ўЙъёД±дЈ¬¶шКэЦµДЈДвЦРОґїјВЗґҐµЧЗйїцЈ¬јґІЙСщЖчТ»Ц±ґ¦УЪЧФУЙПВВд№эіМЈ¬ТтґЛЈ¬Ѕц±ИЅПЧФУЙПВВдІї·ЦЛЩ¶ИєНО»ТЖµД±д»ЇЎЈ
ґУНј4»№їЙТФїґіцЈєО»ТЖєНЛЩ¶И¶Ф±ИЅб№ыПаІоІ»ґуЎЈКµІвЦРІЙСщЖчѕЯУРХыБчХЦЈ¬ДЬ№»µчЅЪОІБчЈ¬ФЪТ»¶ЁіМ¶ИЙПјхРЎЧиБ¦Ј¬¶шКэЦµДЈРНЦРјт»ЇБЛЅб№№ЅПёґФУµДХыБчХЦІї·ЦЈ¬ТтґЛЈ¬ЖдЛЩ¶ИєНО»ТЖВФѕщ±ИКµІвЦµРЎЎЈ

Нј4 ІЙСщЖчО»ТЖєНЛЩ¶ИЛжК±јдµД±д»Ї
Fig. 4 Change of displacement and velocity of sampler with time
ФЪІ»їјВЗґҐµЧµДЗйїцПВЈ¬±ѕОД№№ЅЁµД·Ѕ·ЁДЬ№»ЅПєГµШДЈДвЦШБ¦КЅІЙСщЖчФЪѕІЛ®ЦРЧФУЙПВВдµД№эіМЈ¬ЗТКэЦµЅб№ыУлКµІвЅб№ыОЗєПЅПєГЎЈ¶шЗТУЙУЪІЙСщЖчµДЧФЙнЦКБїЅПґуЈ¬ЅУґҐєЈµЧК±ѕЯУРЧг№»µДЦШБ¦КЖДЬК№Жд№бИлНБЦРЈ¬№К¶ФПВВдЛЩ¶Ијґ¶ЇДЬ»щ±ѕГ»УРТЄЗуЎЈТтґЛЈ¬ФЪАнПлµДґ№Ц±ПВВдЗйїцПВЈ¬ІЙСщЖчїЙТФНкіЙИЎСщИООсЎЈ
2.3 ІЙСщЖчЗгР±ПВВд№эіМ·ЦОц
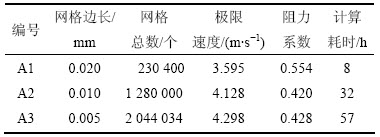
ФЪАнПлЧґМ¬ПВЈ¬ІЙСщЖчФЪНСАВЧФУЙПВВдК±КЗґ№Ц±µДЈ¬µ«ФЪКµјКК№УГЦРЈ¬УЙУЪєЈБчЎўґ¬І°ЖЇТЖµИУ°ПмЈ¬єЬДС±ЈЦ¤ІЙСщЖчІ»іцПЦЖ«ЧЄЅЗЈ¬¶шіхКјµДЗгР±ЅЗ¶ФЧоЦХИЎСщР§ВКµДУ°ПмЙРІ»ГчИ·Ј¬ТтґЛЈ¬ФЪґ№Ц±ПВВдµД»щґЎЙПЈ¬ДЈДвІЙСщЖчЗгР±ПВВдµД№эіМѕЯУРЦШТЄµДТвТеЎЈёщѕЭЗ°ИЛєЈІвѕСйЈ¬ФЪЅПБјєГµДєЈїцМхјюПВЈ¬НЁ№э¶ФПВВдЛЩ¶ИµДїШЦЖЈ¬ІЙСщЖчµД»ОµґІўІ»К®·ЦѕзБТЈ¬ЗгЅЗТ»°гФЪ0Ўг~10ЎгЦ®јдЎЈ±ѕОДЧчХЯФЪЅшРРКэЦµјЖЛгК±Ј¬СЎИЎІЙСщЖчЗгЅЗОЄ5ЎгЅшРР·ЦОцЈ¬ІЙСщЖчПВВд№эіМЦРЧЛМ¬±д»Їј°ЛЩ¶ИФЖНјИзНј5ЛщКѕЎЈІЙСщЖчЖ«ЧЄЅЗ¶ИєНЛЩ¶ИЛжК±јдµД±д»ЇјыНј6ЎЈ

Нј5 ІЙСщЖчПВВд№эіМЦРЧЛМ¬±д»Їј°ЛЩ¶ИФЖНј
Fig. 5 Posture changes and velocity cloud charts of falling sampler
Нј6 ІЙСщЖчЖ«ЧЄЅЗ¶Иј°ПВВдЛЩ¶ИЛжК±јдµД±д»Ї
Fig. 6 Change of angle and velocity of sampler with time
УЙНј6їЙЦЄЈєІЙСщЖчµДЖ«ЧЄЅЗ¶ИФЪПВВд№эіМЦРјёєхіКЦёКэФці¤Ј¬ФЪПВВд1.36 sК±ІЙСщЖчЖ«ЧЄТСґп45ЎгЈ¬ґЛК±Ј¬ПВВдѕаАлОЄ7.02 mЎЈ¶шІЙСщЖчПВВдЛЩ¶ИіКПЯРФФцґуЈ¬ФЪ1.41 sК±ПВВдЛЩ¶ИґпµЅ·еЦµ8.73 m/sЈ¬ЛжєуїЄКјјх»єЈ»Н¬К±Ј¬ФЪПВВд1.41 sєуІЙСщЖчЖ«ЧЄЅЗОЄ44.5ЎгЈ¬ґЛК±Ј¬ІЙСщЖчґ№Ц±УЪЛЩ¶ИµДєбЅШГжН¶У°ТСѕЅПґуЈ¬КЬµЅµДЧиБ¦ТІПа¶ФЅПґуЈ¬ґУ¶шК№µГЧиБ¦¶ФІЙСщЖчІъЙъµДУ°Пмі¬№эЦШБ¦µДУ°ПмЈ¬ТтґЛЈ¬ІЙСщЖчПВВдЛЩ¶ИїЄКјјхРЎЎЈ
ФЪКµјКІвКФЦРЈ¬ЖЪНы»сИЎµДіБ»эОпСщ±ѕДЬ№»ёІёЗёьЙоµДНБІгЈ¬ТтґЛЈ¬ФЪЙијЖЅЧ¶ОТ»°гТЄЗуІЙСщЖчИлНБЗ°µДЖ«ЧЄЅЗѕЎБїїШЦЖФЪЅПРЎ·¶О§ДЪЎЈІЙСщЖчЗгР±ИлНБКѕТвНјИзНј7ЛщКѕЎЈЅ«ИЎСщВК¶ЁТеОЄИлНБґ№Ц±Йо¶ИdthУлИЎСщ№Ьі¤¶ИlµД±ИЦµЎЈґҐµЧК±µДЖ«ЧЄЅЗУлИЎСщВКµД№ШПµИз±н2ЛщКѕЎЈґУ±н2їЙЦЄЈєµ±ІЙСщЖчТФ5ЎгіхКјЗгР±ЅЗПВВдК±Ј¬ёГІЙСщЖчИз№ыТЄ±ЈЦ¤90%ТФЙПµДИЎСщВКЈ¬ПВВдѕаАлІ»ДЬі¬№э5 mЈ¬ИЭРнµДЧоґуЖ«ЧЄЅЗФјОЄ25ЎгЎЈ

Нј7 ІЙСщЖчЗгР±ИлНБКѕТвНј
Fig. 7 Diagram of slant sampler penetrating in ground
±н2 ЗгР±ІЙСщЖчЖ«ЧЄЅЗУлИЎСщВКµД№ШПµ
Table 2 Relationship between deflection angle and sampling rate

3 ЅбВЫ
1) ±ѕОДІЙУГµДЦШµюНшёс·ЁФЛЛг№эіМОИ¶ЁЈ¬ДЬ№»»сµГЗтМеПВВдЛЩ¶И±д»Ї№жВЙј°ґпµЅј«ПЮПВВдЛЩ¶ИК±ФИЛЩПВВдµДОИ¶ЁЧґМ¬Ј¬ЗТКэЦµДЈДвЅб№ыУлКµІвЅб№ыЅПЅУЅьЈ¬ЛµГчЦШµюНшёс·ЁКЗЅвѕцБчМеУлЅПґу·¶О§ФЛ¶ЇЅб№№П໥ЧчУГОКМвµДТ»ЦЦУРР§·Ѕ·ЁЎЈ
2) ФЪКµјКєЈІвЦРЈ¬ІЙСщЖчФЪЧФУЙПВВдК±µДіхКјЗгР±ЅЗ¶ФИЎСщВКУ°ПмєЬґуЎЈУліхКј±ЯЅзМхјюОЄґ№Ц±ПВВдЧґМ¬Па±ИЈ¬ЖдПВВдЛЩ¶ИіКПИФцґуєујхРЎµДЗчКЖЈ»¶ФУЪІЙСщЖчФЪ5ЎгіхКјЗгР±ЅЗµДЗйїцПВЈ¬Ж«ЧЄµДЅЗЛЩ¶ИїЙґп34 (Ўг)/sЎЈ
3) ЧФУЙПВВдѕаАлТІКЗУ°ПмІЙСщР§ВКµДЦШТЄТтЛШЎЈѕаАл№эі¤Ј¬ІЙСщЖчК§ОИіМ¶ИФЅёЯЈ¬µјЦВІЙСщК§°ЬЙхЦБФміЙІЙСщЖчЛрЙЛЎЈІЙУГ±ѕОДІЙСщЖчЈ¬ФЪ±ЈЦ¤90%ІЙСщВКµДЗ°МбПВ,ПВВдѕаАлІ»ДЬі¬№э5 mЎЈ
ІОїјОДПЧЈє
[1] єОёЯОД. ПтЙоєЈЧКФґїЄ·ўЗї№ъЅшѕь[EB/OL]. [2016-09-15]. http://www.gtzyb.com/lilunyanjiu/20160918_99784.shtml.
HE Gaowen. Advance to deep water resources power[EB/OL]. [2016-09-15]. http://www.gtzyb.com/lilunyanjiu/20160918_ 99784.s html.
[2] ИоИс. єЈµЧЦШБ¦ИЎСщјјКхµДМЅМЦ[J]. єЈСуІв»ж, 2009, 29(1): 66-69.
RUAN Rui. Discussion of technology on sea floor gravity sampling[J]. Hydrographic Surveying and Charting, 2009, 29(1): 66-69.
[3] ¶ЕРЗ, ЛпУАёЈ, єъ№вєЈ, µИ. ЦШБ¦»оИыИЎСщЖч№бИлЙо¶ИСРѕї[J]. єЈС󹤳М, 2016, 34(3): 133-139.
DU Xing, SUN Yongfu, HU Guanghai, et al. Study on penetration depth of gravity piston corer[J]. The Ocean Engineering, 2016, 34(3): 133-139.
[4] АиУА·ў. ЙоєЈіБ»эОпИЎСщЖчј°ЖдЗт·§№ШјьјјКхµДСРѕї[D]. єјЦЭ: ХгЅґуС§єЈСуС§Фє, 2016: 4-7.
LI Yongfa, Research on the key technology of deep-sea sediment sampler and ball valves[D]. Hangzhou: Zhejiang University. College of Ocean, 2016: 4-7.
[5] ЛО»¶Бд. °ІИ«ЦШБ¦»оИыИЎСщЖч: CN 87209127 U[P]. 1988-02-17.
SONG Huanling. Safe gravity piston sampler: CN 87209127 U[P]. 1988-02-17.
[6] І№јТОд, ЫіМ©Дю, ІэЦѕѕь. єЈµЧИЎСщјјКх·ўХ№ПЦЧґј°№¤ЧчФАнёЕКцЎЄЎЄєЈµЧИЎСщјјКхЧЁМвЦ®Т»[J]. МЅїу№¤іМ(СТНБЧкѕт№¤іМ), 2001, 44(2): 44-48.
BU Jiawu, YAN Taining, CHANG Zhijun. Introduction to the status quo and operating principle of seabed samplers: part ўс of the subject on seabed sampling[J]. Exploration Engineering (Rock & Soil Drilling and Tunneling), 2001, 44(2): 44-48.
[7] ХЕЗмБ¦, Бх№уЅЬ, Бх№ъУЄ. РВРНєЈµЧіБ»эОпІЙСщЖчЅб№№ЙијЖј°ІЙСщ№эіМ¶ЇМ¬·ЦОц[J]. єЈСујјКх, 2009, 28(4): 20-23.
ZHANG Qingli, LIU Guijie, LIU guoying. The structural design and dynamic analysis of collecting process of new type seabed sampler[J]. Ocean Technology, 2009, 28(4): 20-23.
[8] CHEN Jiawang, FAN Wei, BINGHAM B, et al. A long gravity-piston corer developed for seafloor gas hydrate coring utilizing an in situ pressure-retained method[J]. Energies, 2013, 6(7): 3353-3372.
[9] ОДФуѕь, БхХї, ЅрУАЖЅ, µИ. ЙоєЈЦШБ¦»оИыИЎСщЖчИЎСщПµНіІЁ¶ЇБ¦С§ЅЁДЈУл·ЦОц[J]. ЦР№ъ»ъРµ№¤іМ, 2016, 27(17): 2280-2286.
WEN Zejun, LIU Zhan, JIN Yongping, et al. Modeling and analysis for sampling system of deep-sea gravity piston sampler based on wave mechanics[J]. China Mechanical Engineering, 2016, 27(17): 2280-2286.
[10] іМХсІЁ, СоёХ, ОвУА»Є,µИ. і¤ЦШБ¦»оИыИЎСщЖчФЪ¶х»фґДїЛєЈµДУ¦УГ[J]. єЈСуїЖС§ЅшХ№, 2013, 31(4): 553-558.
CHENG Zhenbo, YANG Gang, WU Yonghua, et al. Application of long gravity piston corer in the Okhotsk Sea[J]. Advances in Marine Science, 2013, 31(4): 553-558.
[11] АоГсёХ. 40ГЧЦШБ¦»оИыИЎСщЖчЙијЖј°·ВХж[D]. Заµє: ЗаµєАн№¤ґуС§»ъРµ№¤іМС§Фє, 2012: 3-11.
LI Mingang. Design and simulation of 40 m gravity piston corer[D]. Qingdao: Qingdao University of Technology. College of Mechanical Engineering, 2012: 3-11.
[12] WINTERS W J, LORENSON T D, PAULL C K. Coring and gas hydrate-related operations during the IMAGES VIH/PAGE 127 gas hydrate and paleoclimate cruise on the RV Marion Dufresne in the Gulf of Mexico[R]. Woods Hole, USA: Woods Hole Science Centre, 2002: 4-43.
[13] ХЕцО, ипХс¶«, СЦѕь, µИ. ЙоєЈіБ»эОпі¬і¤ИЎСщПµНіСРѕїЅшХ№[J]. єЈСуµШЦКЗ°СШ, 2012, 28(12): 40-45.
ZHANG Xin, LUAN Zhendong, YAN Jun, et al. AЎЎreview of development in deep-sea long coring system[J]. Marine Geology Frontiers, 2012, 28(12): 40-45.
[14] Бх€ђ, ІМОАѕь, НхГчЦЮ. »щУЪЦШµюНшёс·Ѕ·ЁµДЛ®ВЦ»ъ·З¶ЁіЈЛ®¶ЇБ¦КэЦµ·ВХж[J]. ЦР№ъЅўґ¬СРѕї, 2018, 13(1): 85-92.
LIU Yao, CAI Weijun, WANG Mingzhou. Numerical simulation for hydrodynamic performance of marine current turbine based on overset grid[J]. Chinese Journal of Ship Research, 2018, 13(1): 85-92.
[15] ЙтЦѕИЩ. ґ¬Ѕ°¶жП໥ЧчУГµДЦШµюНшёсјјКхКэЦµ·Ѕ·ЁСРѕї[D].ЙПєЈ: ЙПєЈЅ»НЁґуС§ґ¬І°єЈСуУлЅЁЦю№¤іМС§Фє, 2014: 13-16.
SHEN Zhirong. Development of overset grid technique for hull-propeller-rudder interactions[D]. Shanghai: Shanghai Jiao Tong University. School of Naval Architecture, Ocean & Civil Engineering, 2014: 13-16.
[16] BOGER D A, NOACK R W, PATERSON E G. Dynamic overset grid implementation in OpenFOAM[C]// 5th OpenFOAM Workshop. Gothenburg, Sweden, 2010: 21-24.
[17] ІЬєйЅЁ, НтµВіЙ. »щУЪnaoe-FOAM-SJTUЗуЅвЖч№№ЅЁИэО¬КэЦµІЁАЛЛ®іШ[J]. ёґµ©С§±Ё(ЧФИ»їЖС§°ж), 2013, 52(5): 627-634.
CAO Hongjian, WAN Decheng. Three-dimensional numerical wave tank based on naoe-FOAM-SJTU solver[J]. Journal of Fudan University(Natural Science), 2013, 52(5): 627-634.
[18] CHANDAR D. Seamless integration of an overset grid framework for OpenFOAM:[EB/OL].[2015-09-24]. https://ww w.esi-group.com/abstract-openfoam2015-chandar-institute-high-performance-computing-seamless-integration-overset-grid.
[19] НхЅЁ»Є, НтµВіЙ. »щУЪЦШµюНшёсјјКхКэЦµДЈД⴬І°ґїТЎКЧФЛ¶Ї[J]. Л®¶ЇБ¦С§СРѕїУлЅшХ№(Aј), 2016, 31(5): 567-574.
WANG Jianhua, WAN Decheng. Numerical simulation of pure yaw motion using dynamic overset grid technology[J]. Journal of Hydrodynamics(A), 2016, 31(5): 567-574.
[20] ХЕПю¶«, ХЕЕаБЦ, ёµЅЁЖЅ, µИ. k-¦ЕЛ«·ЅіМНДБчДЈРН¶ФЦЖНЛ»ъДЪБчіЎјЖЛгµДККУГРФ·ЦОц[J]. ±¬ХЁУліе»ч, 2011, 31(5): 516-520.
ZHANG Xiaodong, ZHANG Peilin, FU Jianping, et al. Applicability analysis of k-¦Е turbulence models on numerical simulation of internal flow field of recoil brake[J]. Explosion and Shock Waves, 2011, 31(5): 516-520.
[21] BROWN P P, LAWLER D F. Sphere drag and settling velocity revisited[J]. Journal of Environmental Engineering, 2015, 129(3): 222-231.
[22] ХЕѕэФЄ, Со№вёґ. ЦШБ¦»оИыІЙСщЖчєЈЙПІЙСщјјКхµДСРѕї[J]. єЈСуїЖС§, 1983, 7(6): 19-22.
ZHANG Junyuan, YANG Guangfu. Gravity piston sampler sampling technology research at sea[J]. Marine Sciences. 1983, 7(6): 19-22.
[23] ¶Ммєк, »ЖєЈїЖ, їВЕф·Й. УгАЧГЄµД·ЅПтОИ¶ЁРФСРѕї[J]. №г¶«Ф촬, 2015, 34(4): 24-27.
DONG Tianhong, HUANG Haike, KE Pengfei. Directional stability of torpedo anchors[J]. Guangdong Shipbuilding, 2015, 34(4): 24-27.
[24] ¶ЕРЗ, ЛпУАёЈ, ЛОУсЕф, µИ. ЦШБ¦»оИыИЎСщЖч№бИлДЈРНСРѕї[J]. єЈСуїЖС§ЅшХ№, 2018, 36(1): 88-97.
DU Xing, SUN Yongfu, SONG Yupeng, et al. Study of penetration depth from a model of gravity piston corer[J]. Advances in Marine Science, 2018, 36(1): 88-97.
[25] ХЕС©зч. ¶ЇБ¦№бИлГЄЛ®ЦРЧФУЙПВВд№эіМµДКэЦµДЈДв[D]. ґуБ¬:ґуБ¬Ан№¤ґуС§ЅЁЙ蹤іМС§Ії, 2015: 14-17.
ZHANG Xueqi. Numerical simulation of the free fall of gravity installed anchor in water[D]. Dalian: Dalian University of Technology. Faculty of Infrastructure Engineering, 2015: 14-17.
[26] Бхѕэ, ХЕС©зч. °еТн¶ЇБ¦ГЄЛ®ЦРЧФУЙПВВд№эіМКэЦµДЈДв[J]. єЈС󹤳М, 2017, 35(3): 29-36.
LIU Jun, ZHANG Xueqi. Numerical simulation of the installation of gravity installed plate anchors in water[J]. The Ocean Engineering, 2017, 35(3): 29-36.
(±ај ОйЅх»Ё)
КХёеИХЖЪЈє2018-04-16Ј»РЮ»ШИХЖЪЈє2018-06-16
»щЅрПоДї(Foundation item)Јє№ъјТЧФИ»їЖС§»щЅрЧКЦъПоДї(41572252)(Project(41572252) supported by the National Natural Science Foundation of China)
НЁРЕЧчХЯЈєНхШ·Ј¬І©КїЈ¬ё±ЅМКЪЈ¬ґУКВЙоєЈµШЦКї±МЅј°ІЙСщјјКхСРѕїЈ»E-mailЈєy.wang@dlut.edu.cn

