含通信时延的卫星编队飞行输出反馈姿态协同跟踪控制
周稼康,胡庆雷,马广富
(哈尔滨工业大学 控制科学与工程系,黑龙江 哈尔滨,150001)
摘要:针对编队卫星姿态协同跟踪控制问题,考虑在实际系统中存在相异的星间通信时变时间延迟问题,从而引入一阶滤波器设计含通信时延的输出反馈控制器;并通过引入参数在线自适应辨识技术,利用卫星姿态误差信息来实现对卫星的转动惯量进行在线估计。进一步构造特定的Lyapunov函数,证明该控制器不仅能够有效地克服通信时间延迟对编队系统协同性的影响,同时可论证无需角速度信息反馈的闭环系统的有界稳定性。最后将提出的算法应用于只需要角速度信息反馈的卫星编队飞行的协同控制,仿真结果表明该方法有效可行,具有实际的应用前景。
关键词:卫星编队飞行;姿态协同;输出反馈;通信时延
中图分类号: V448.2 文献标志码:A 文章编号:1672-7207(2011)S1-0240-06
Angle velocity free attitude synchronization tracking control for satellite formation flying with time-varying delay
ZHOU Jia-kang, HU Qing-lei, MA Guang-fu
(Department of Control Science and Engineering, Harbin Institute of Technology, Harbin 150001, China)
Abstract: An output feedback based attitude synchronization tracking control law is developed for satellite formation flying, without using explicit angular velocity feedback, even in the presence of unknown communication non-uniform various time-delay and inertia matrix. More specifically, the controller structure includes a low-pass linear filter state that is derived without explicit differentiation of attitude to synthesize angular velocity-like signals, and an adaptive updating law is also involved to identify the satellite inertia matrix such that no knowledge of the inertia of the satellites in formation is required a prior. The associated stability proof is constructive and accomplished by the development of a novel Lyapunov function candidate which proves the formation systems to be bounded stability. Simulation results are presented to demonstrate the effectiveness of the control law.
Key words: satellite formation flying; attitude cooperative; output feedback; communication time-delay
随着空间技术的发展,多颗卫星编队构成一个整体实现各种空间任务的要求,可以突破单颗卫星的功能局限性,为了获取对观测目标更广范围,更多角度的探测,需要对卫星间的相对姿态进行协调控制[1-2]。
在编队卫星系统的实用中,由于通信设备物理特性对信息传递速度的限制,不可避免地出现通信时间延迟现象,影响整体系统的稳定性。文献[3]中证明了针对一阶线性系统的分布式控制,有向通信拓扑结构中信号的时间延迟并不影响系统的稳定性,并通过频域分析方法给出了定常时间延迟的上界。文献[4]在此基础上分析通信链路中存在相异时变时间延迟对多智能体一致性控制问题的稳定性研究。文献[5]针对通信链路中存在相异时间延迟二阶线性系统的一致性控制问题的稳定性进行分析。文献[6]对二阶线性系统的位置及速度进行一致性协同控制,其中不仅考虑通信链路的时间延迟而且考虑系统本身状态信息延迟反馈。然而,这些研究均是线性控制系统的研究,而卫星姿态运动学及动力学方程均有其特殊的非线性,上述线性系统的控制分析方法很难推广到姿态的分布式协同控制中。
进一步考虑到编队卫星的实际应用中,当系统出现角速度敏感器故障或者为了节省成本采用无角速度敏感器配置方案时,编队卫星需采用仅利用卫星姿态信息的输出反馈控制,达到对期望目标的跟踪及相对姿态的协同控制。文献[7]在文献[8]研究的基础上,针对每颗卫星及每一对相互通信的卫星,分别引入结构类似于四元数姿态模型的辅助动力学系统,利用辅助系统设计了无需绝对角速度及相对角速度信息的输出反馈控制器。文献[9]在文献[10]的基础上对卫星姿态调节问题设计抗输入饱和的协同控制器;文献[11]将文献[10]中的方法用于四元数表示的姿态模型,并使编队系统姿态及角速度协同收敛于期望值。然而,目前的研究成果未见到在考虑通信时间延迟对分布式编队控制系统影响的情况下,对其设计输出反馈控制器并进行稳定性分析。
基于上述研究,针对编队卫星姿态协同跟踪控制问题,考虑星与星间通信的时间延迟问题,在文献[12]的研究基础上,给出了无需角速度信息的输出反馈姿态协同跟踪控制器的设计方法。同时,利用卫星姿态误差信息来实现对卫星的转动惯量进行在线估计。并证明了系统协同收敛于时变的期望姿态及角速度的有界稳定性。
1 卫星姿态运动学与动力学模型
考虑第i个从星相对于惯性系的姿态动力学和运动学,具有如下形式[7-9]:
 (1a)
(1a)
 (1b)
(1b)
 (1c)
(1c)
其中:Ji为第i个从星的转动惯量(i=1, 2, …, n), ωi为星体相对于惯性系角速度矢量, 为星体相对于惯性系的姿态四元数, 且qi为其矢量部分,q0i为其标量部分, 且定义
为星体相对于惯性系的姿态四元数, 且qi为其矢量部分,q0i为其标量部分, 且定义 为四元数的逆,定义为:
为四元数的逆,定义为: ,τi为控制力矩,di为外部干扰力矩。另外,在此给出误差四元数及误差角速度的定义:
,τi为控制力矩,di为外部干扰力矩。另外,在此给出误差四元数及误差角速度的定义: ,
, ,其中
,其中 ,
, 为期望的姿态四元数及角速度,
为期望的姿态四元数及角速度, 为从期望坐标系到星i
为从期望坐标系到星i
本体坐标系的状态转移矩阵。由文献[13]可知,误差四元数及误差角速度仍然满足式(1)描述的卫星编队姿态运动学方程,即有:
 (2a)
(2a)
 (2b)
(2b)

 (2c)
(2c)
至此,在后续的研究中,将采用式(2)描述的卫星编队姿态方程来进行控制系统的设计研究 。
2 协同输出反馈跟踪控制器设计
引入一阶滤波器的信息反馈虽然不能够精确的估计角速度,但是可以为控制系统提供足够的信息以实现角速度的协同跟踪目标。由于编队小卫星的星载计算机的能力有限,所以本文采用此种方法设计控制器。首先设计如下滤波器:
 (3)
(3)
其中: ,并定义参数
,并定义参数 为:
为:
 (4a)
(4a)
 (4b)
(4b)
其中: 为参数的估计值,
为参数的估计值, 是正定加权矩阵,
是正定加权矩阵, 为正常数,
为正常数, ,并且矩阵
,并且矩阵 具有如下形式:
具有如下形式:
根据式(3)与式(4),选取编队卫星i的控制律为:

 (5)
(5)
其中: ,
, 和
和 ,
, 为可调控制参数。
为可调控制参数。 描述卫星间通信的拓扑关系,当卫星j到卫星i有信息传递时
描述卫星间通信的拓扑关系,当卫星j到卫星i有信息传递时 (
( ,
, ),当星间无信息传递时,
),当星间无信息传递时, ;αij定义同。
;αij定义同。 为卫星j到卫星i的非负时变通信延迟,且
为卫星j到卫星i的非负时变通信延迟,且 ;
; 为星j本体坐标系到星i本体坐标系延迟形式的坐标转换矩阵。由此可得到如下结论。
为星j本体坐标系到星i本体坐标系延迟形式的坐标转换矩阵。由此可得到如下结论。
定理1 当 ,
, 为有界函数,并且当时变通信时间延迟满足
为有界函数,并且当时变通信时间延迟满足
 (6a)
(6a)
 (6b)
(6b)
在理想情况 下,通过调节控制参数
下,通过调节控制参数 ,
, 和
和 ,
, 可使得编队卫星在控制器(5)的作用下协同有界稳定于期望值。
可使得编队卫星在控制器(5)的作用下协同有界稳定于期望值。
证明 针对分布式通信时延系统,选取Lyapunov函数如下:
 (7)
(7)
其中 ,
, 为适当非负常数;选取Vi如下:
为适当非负常数;选取Vi如下:

 (8)
(8)
式中:βi,θi和γi为适当正常数,并 ,当控制参数的选取满足下式时:
,当控制参数的选取满足下式时:
 (9a)
(9a)
 (9b)
(9b)
则V≥0。并对函数V沿系统动力学方程(2)对时间求导并化简,定义向量 ;则
;则 可表示为:
可表示为:
 (10)
(10)
其中,矩阵 ,定义如下:
,定义如下:
 (11a)
(11a)
 (11b)
(11b)
 (11c)
(11c)
 (11d)
(11d)
 (11e)
(11e)

 (11f)
(11f)
假设q11, m,q22, m和q33, m分别表示q11,q22和q33的诱导范数的下界,q12, M,q13, M,q23, M分别表示q12,q13和q23的诱导范数的上界,当有:
 (12a)
(12a)
 (12b)
(12b)
 (12c)
(12c)
则有下式成立[14]:
 (13)
(13)
则有下式成立
 (14)
(14)
根据式(13)及式(11)得到控制参数的范围如下:

 (15a)
(15a)
 (15b)
(15b)
 (15c)
(15c)

 (15d)
(15d)
令 ,并假设,
,并假设, ,可得:
,可得:

 (16)
(16)
定义
 (17a)
(17a)
 (17b)
(17b)
选取控制参数范围同时满足
 (18)
(18)
可得:

 (19)
(19)
选取控制参数范围满足式(9)时,可得V>0,并且由式(19)可得: 时,
时, ,由此可证明系统能够收敛到原点的邻域
,由此可证明系统能够收敛到原点的邻域 内。证毕。
内。证毕。
为了方便分析描述,控制器(5)中所有控制参数均选用标量表示;而根据实际需要,其也可以更换为合适维数的矩阵,仍能保证编队卫星姿态协同控制的稳定性。
为论证编队卫星姿态协同输出反馈系统的稳定性,式(6)、式(9)、式(15)及式(18)中给出的控制参数的范围均为充分条件而非必要条件。
3 仿真分析
假设编队由3颗卫星组成,为验证本文提出的控制算法的可行性与有效性,根据文献[15]设定卫星的参数、初始状态及期望姿态、角速度,并根据式(6)、式(9)、式(15)及式(18)给出的条件并参考注3选取控制参数如表1所示。
表3 控制参数
Table 3 Parameters of control law

以星3为例,控制器式(5)的仿真结果如图1所示。由仿真结果可知:控制器(5)在无需角速度信息的情况下,使星3的姿态和角速度趋近于期望姿态及角速度,并且控制力矩在有限的幅值2 N・m内变化,证明控制器是实际可行的。
图2所示为星与星间的相对姿态误差曲线。可以看出,尽管存在模型不确定性和通信延迟的作用,卫星的姿态仍然能够很好地达到协同。对比图1与图2的仿真曲线收敛时间。可以看出:3颗卫星几乎同时收敛于期望姿态,其相对姿态误差定义为qij。由此表明:编队卫星在控制器(5)的控制下由不同初始条件下可以达到姿态及角速度的良好协同跟踪效,满足卫星编队飞行实际任务的需求。
4 结论
针对编队卫星姿态协同跟踪控制问题,考虑在实际系统中存在星间通信的时间延迟问题,从而引入一阶滤波器设计无需角速度信息的控制器;并构造特定的Lyapunov函数,证明该控制器不仅能够有效地克服通信时间延迟对编队系统协同性的影响,同时论证了输出反馈控制的闭环系统稳定性。最后,本文给出的仿真结果表明:该方法有效可行,具有实际的应用前景。
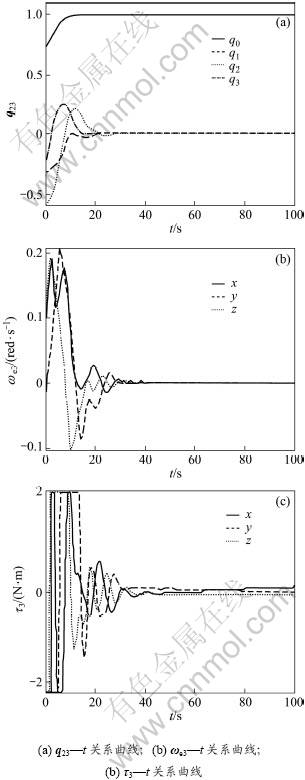
图1 星3姿态误差、角速度误差和控制力矩
Fig.1 Absolute attitude & angular velocity errors & control torque of sat. 3
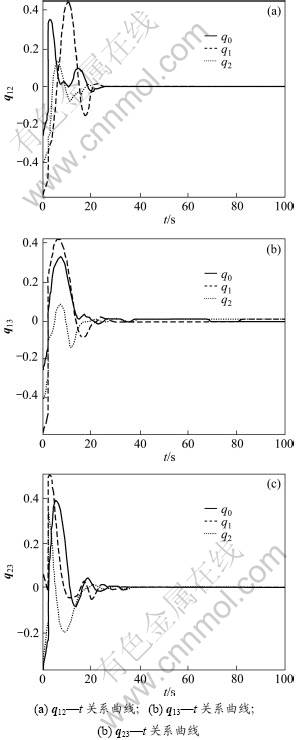
图2 星间相对姿态误差
Fig.2 Relative attitude with inter-satellite communication
参考文献:
[1] Chung S J, Ahsun U, Slotine J J E. Application of synchronization to formation flying spacecraft: Lagrangian approach[J]. Journal of Guidance, Control, and Dynamics, 2009, 32 (25): 512-526.
[2] Dimarogonasa D V, Tsiotras P, Kyriakopoulos K J. Leader-follower cooperative attitude control of multiple rigid bodies[J]. Systems & Control Letters, 2009, 58(6): 429-435.
[3] Moreau L. Stability of continuous-time distributed consensus algorithms[C]//In Proceedings of the IEEE Conference on Decision and Control. Atlantis, Paradise, Bahamas, 2004: 3998-4003.
[4] Bliman P A, Ferrari-Trecate G. Average consensus problems in networks of agents with delayed communications[J]. Automatica, 2008, 44(8): 1985-1995.
[5] Munz U, Papachristodoulou A, Allgower F. Delay-dependent rendezvous and flocking of large scale multi-agent systems with communication delays[C]//In Proceedings of the 47th IEEE Conference on Decision and Control. Cancun, Mexico, 2008: 2038-2043.
[6] MENG Zi-yang, REN Wei, CAO Yong-can, et al. Leaderless and leader-following consensus with communication and input delays under a directed network topology[J]. Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, 2011, 41(1): 75-88.
[7] Abdessameud A, Tayebi A. Decentralized attitude alignment control of spacecraft within a formation without angular velocity measurement[C]//Proceedings of the 17th International Federation of Automatic Control World Congress, Seoul, Korea, 2008: 1766-1771.
[8] Tayebi A. Unit quaternion-based output feedback for the attitude tracking problem[J]. IEEE Transactions on Automatic Control, 2008, 53 (6): 1516-1520.
[9] REN Wei. Distributed cooperative attitude synchronization and tracking for multiple rigid bodies[J]. IEEE Transactions on Control Systems Technology, 2010, 18 (2): 383-392.
[10] REN Wei. Distributed attitude synchronization for multiple rigid bodies with Euler-Lagrange equations of motion[C]//Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 2007: 2363-2368.
[11] WU Bao-Lin, WANG Dan-Wei, Poh E K. Decentralized attitude coordinated control without velocity measurements for spacecraft formation[C]//The 8th IEEE International Conference on Control and Automation. Xiamen, China, 2010: 667-672.
[12] 周稼康, 胡庆雷, 马广富, 等. 带时变通信时间延迟的卫星编队姿态协同自适应L2增益控制[J]. 航空学报, 2011, 32(2): 321-329.
ZHOU Jia-kang, HU Qing-lei, MA Guang-fu, et al. Adaptive L2-gain cooperative attitude control of satellite formation flying with time-varying delay[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(2): 321-329.
[13] Wen J T Y, Delgado K K. The attitude control problem[J]. IEEE Transactions on Automatic Control, 1991, 36(10): 1148-1162.
[14] Kristiansen R, Loria A, Chaillet A, et al. Spacecraft relative rotation tracking without angular velocity measurements(3)[J]. Automatica, 2009, 45(3): 750-756.
[15] JIN Er-dong, JIANG Xiao-lei, SUN Zhao-wei. Robust decentralized attitude coordination control of spacecraft formation[J]. Systems & Control Letters, 2008, 57(7): 567-577
(编辑 陈爱华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61004072);辽宁省教育厅高校科研计划项目(L2010009)
通信作者:胡庆雷(1979-),男,河南太康人,博士,副教授,从事卫星编队研究; 电话:0451-86413411-8606; E-mail: huqinglei@hit.edu.cn

