履带式试验车软地面行走性能仿真分析
刘少军,王国庆
(中南大学 机电工程学院,湖南 长沙,410083)
摘要:软路面行驶时,履带式试验车的行驶性能主要体现在履带板在软路面上的沉陷量、履带的打滑率以及试验车主轴的扭矩等几个方面。介绍ADAMS/ATV中软路面模型的计算方法,然后在完成履带式试验车机械设计的基础上,建立ADAMS/ATV虚拟样机模型,对履带式试验车在软地面条件下的行驶性能进行仿真分析。通过对仿真结果的分析和计算可知履带板的沉陷量为0.045 m到0.055 m,试验车的打滑率为5.37%,验证试验车设计的合理性。通过对履带式试验车驱动轮主轴扭矩的仿真分析,得到稳定状态下主轴平均扭矩为126.5 N·m,启动扭矩为239 N·m,为试验车动力参数的确定提供理论依据。
关键词:履带式试验车;软地面;行走性能;仿真
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S2-0285-04
Simulation and analysis of walking performance of tracked test vehicle tracking on soft road
LIU Shao-jun, WANG Guo-qing
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The walking performance of tracked test vehicle tracking on soft road mainly includes the penetration of belts, the slip rate, the main torque of the shaft. The calculation method of soft road model in ADAMS/ATV was introduced. The virtual prototype model was built on the platform of ADAMS/ATV, based on the completion of mechanical design of tracked test vehicle. The walking performance of tracked test vehicle tracking on soft road was simulated. The penetration of belts range from 0.045 m to 0.055 m, and the slip rate is approximately 5.37%.The design rationality of tracked test vehicle was verified. The torque of main shaft is 126.5 N·m and the start torque is 239 N·m, providing theoretical basis for the determination of the dynamic parameters of the test vehicle.
Key words: tracked test vehicle; soft road; walking performance; simulation
集矿机系统是整个深海采矿系统最前沿,也是最复杂和最关键的环节[1]。深海采矿环境极其复杂,海泥强度极低,实现集矿机海底的稳定行走、避障和路径跟踪等控制是集矿机正常工作的基本前提[2]。研制履带式试验车,为深海集矿机模拟实验提供实验平台具有重要的意义。本研究以履带式试验车的研制为背景,完成试验车机械结构设计后,在多刚体动力学仿真软件ADAM/ATV中建立试验车的仿真模型,进行软地面行走性能仿真分析,以验证履带车机械结构的合理性以及为履带车动力参数的选择提供理论依据。
1 ADAMS/ATV软路面模型
履带式试验车软地面仿真首先需要建立软路面模型,ADAMS中的ATV工具箱作为分析履带车辆的专用模块,为用户提供多种地面模型,其中软路面具有记忆功能,能够通过路面的矩形网格保留加载历史记录,从而实现反复加载的计算。例如,计算垂直力时会保留每一段路面的最大压陷深度和最大压力,计算纵向和横向力时会保留每一段路面的剪切挠度和剪切力[3]。履带车与地面之间的相互作用力以车辆地面力学理论和半经验公式为基础,分为承载特性和剪切特性[4]。
1.1 正压力计算
对于加载过程,路面与履带板之间的垂直力的计算是基于Bekker所提出的沉陷-压力公式[5]:
 (1)
(1)
其中:z为沉陷深度; 为内摩擦角;b为沉陷部分较小尺寸(履带板宽度);Kc为土壤材料系数;n为变形指数。
为内摩擦角;b为沉陷部分较小尺寸(履带板宽度);Kc为土壤材料系数;n为变形指数。
对于卸载过程,正压力的计算公式为:
 (2)
(2)
其中:Pmax为接地部分的最大压力(与zmax相对应);K0和Au为地面属性参数。为了能够计算正压力,每一段路面上的最大压力Pmax和最大沉陷深度zmax都必须保留。
1.2 纵向压力和横向压力计算
剪切应力-剪切位移的关系是基于Janosi和Hanamoto提出的指数方程,如式(3)所示:
 (3)
(3)
其中: 为最大剪切应力;j为剪切位移。
为最大剪切应力;j为剪切位移。
最大剪切应力与地面压力P之间服从莫尔-库伦关系:
 (4)
(4)
其中:c为土壤内聚系数; 为内摩擦角。结合式(3)和式(4)可得到剪切应力和剪切位移的关系式为:
为内摩擦角。结合式(3)和式(4)可得到剪切应力和剪切位移的关系式为:
 (5)
(5)
在ATV中,位移j在每一步中进行迭代计算,迭代公式为:
当Pn≤Pn-1时,
 (6)
(6)
当Pn>Pn-1时,
 (7)
(7)
2 ADAMS/ATV建模
2.1 虚拟样机建模
ADAMS/ATV中履带车仿真模型由车体、履带系统、主动轮、诱导轮、负重轮、张紧轮以及履带板组成。车体又称母体,是履带车模型中最基本的实体。车体创建后将自动产生履带系统,与履带系统相关的轮系也随之产生。在建立计算履带车模型后,用户可根据需要修改履带车的结构尺寸、受力大小以及路面模型等,最终得到符合要求的仿真模型。
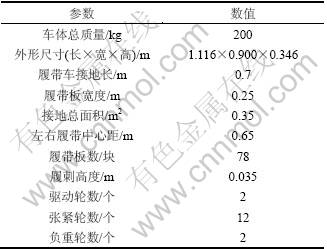
ATV提供2种默认履带车模型分别为坦克模型Tank和农用车模型Crawler,坦克模型用于高速履带车仿真,农用车模型用于低速履带车仿真。本研究的履带式试验车作用是模拟海底集矿机,设计最大速度为0.5 m/s,因此,选择农用车模型为计算模型。履带式试验车仿真模型主要参数如表1所示。
表1 仿真模型主要参数
Table 1 Main parameters of simulation model
调整参数后,建立的履带式试验车虚拟样机模型如图1所示。
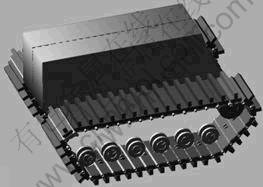
图1 履带式试验车虚拟样机模型
Fig.1 Virtual prototyping model of tracked test vehicle
2.2 软路面参数设置
ADAMS/ATV中每一个履带系统都拥有1个独立的地面参数模型。模拟海底软路面模型的建立方法是在履带系统设置界面的Road Type中选择soft,再将海泥土力学特性参数如入设置窗口,如图2所示[6]。

图2 软路面参数设置
Fig.2 Parameters setting of soft road
3 仿真分析
设置履带车的初始速度为0,设置左右驱动轮Motion均为Step(time,0,0,1,10),即试验车经过1 s的加速后,以0.6 m/s的速度匀速前进。
在ATV中履带板的沉陷量(z方向)不能直接测量,可通过测量质心在z方向的位移来反映沉陷量的变化,如图3所示。试验车在前进方向(x轴)上的速度曲线和主轴转矩曲线分别如图4和图5所示。
履带板沉陷量与履带车的接地比压密切相关,履刺适当的沉陷可以为试验车的行走提供牵引力,沉陷过大时会给试验车带来较大的附加阻力,严重时可能导致整车不能行走。由图3可见:试验车质心初始高度为0.105 m,经过1 s的波动后稳定在0.05 m到0.06 m之间,经计算可得履带板的沉陷量为0.045 m到0.055 m。履带式试验车履刺高度为0.035 m,负重轮下边缘距履带板下端面高度为0.085 m。因此,在整个行走过程中履带板沉陷深度适当,既可为试验车提供足够的牵引力,又不会由于沉陷量过大而导致试验车不能行走。

图3 试验车质心垂直方向的位移
Fig.3 Vertical displacement of centro of test vehicle
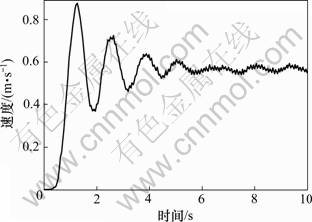
图4 试验车质心水平方向的速度
Fig.4 Horizontal velocity of centro of test vehicle
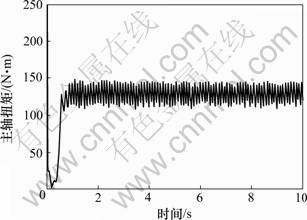
图5 试验车主轴扭矩
Fig.5 Torque of main shaft of test vehicle
试验车在软路面中行驶时,土壤之间必然会产生剪切位移,从而导致履带打滑,因此,履带打滑是不
可避免的。同时,履带打滑率过大严重影响试验车功率的充分发挥。在一般情况下,软路面履带车的最佳打滑率为2%左右,最大打滑率应该控制在10%以内。由图4可知:试验车经过4.5 s后基本进入匀速行驶状态,经计算,4.5 s后试验车平均速度为0.567 8 m/s。试验车理论速度为0.6 m/s,打滑率i=(0.6-0.567 8)/0.6= 5.37%,显然小于要求的10%,可见试验车打滑率满足要求。
由图5可见:试验车在启动的瞬间主轴扭矩最大,约为239 N·m,在ADAMS后处理平台中计算可得稳定状态下主轴的平均扭矩为126.5 N·m。因此,试验车的动力在额定转矩经传动系统到主轴时的扭矩应该大于126.5 N·m,并且在一定的时间内超载能力大于239 N·m。
4 结论
(1) 在ADAMS/ATV中建立履带式试验车的虚拟样机模型,可对软路面试验车履带沉陷以及打滑率进行仿真分析,通过对仿真结果的分析和计算可知履带板的沉陷量在0.045 m到0.055 m之间,试验车的打滑率为5.37%,验证试验车设计的合理性。
(2) 通过对履带式试验车驱动轮主轴扭矩仿真分析,得到了稳定状态下主轴平均扭矩为126.5 N·m,启动扭矩为239 N·m,为试验车动力参数的确定提供了理论依据。
参考文献:
[1] 戴瑜. 履带式集矿机海底行走的单刚体建模研究与仿真分析[D]. 长沙: 中南大学机电工程学院, 2010: 18.
DAI Yu. The modelling research and simulation analysis on the single-rigid-body of tracked miner moving on the seafloor[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2010: 18.
[2] Chung J S. Deep-ocean mining technology: Development Ⅱ[C]//Proceedings of the 6th ISOPE Ocean Mining Symposium. Changsha, 2005: 9-13.
[3] 马伟标, 王红岩. 基于ATV分析履带预张力对车辆软土通过性能的影响[J]. 装甲兵工程学院学报, 2005, 19(4): 59-62.
MA Wei-biao, WANG Hong-yan. The analysis of impact to passing performance of tracked vehicle tracking on soft road based on ATV[J] . Journal of the Academy of Armored Forces Engineering, 2005, 19(4): 59-62.
[4] 黄祖永. 地面车辆原理[M]. 北京: 机械工业出版社, 1985: 69-74.
HUANG Zu-yong. The principle of ground vehicles[M]. Beijing: Machinery Industry Press, 1985: 69-74.
[5] 张克健. 车辆地面力学[M]. 北京: 国防工业出版社, 2002: 145-146.
ZHANG Ke-jian. Vehicle terramechanics[M]. Beijing: National Defense Industry Press, 2002: 145-146.
[6] 王震宇. 深海履带式集矿机行驶性能实验性研究[D]. 长沙: 中南大学机电工程学院, 2004: 41.
WANG Zheng-yu. Experimental study on the walking performance of deep sea tracked vehicle[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2004: 41.
(编辑 何运斌)
收稿日期:2011-06-15;修回日期:2011-07-15
基金项目:国务院大洋专项资助项目(DYXM-115-04-02-01)
通信作者:刘少军(1955-),男,湖南冷水江人,博士生导师,从事深海采矿研究和混合动力研究;电话:13808423595;E-mail: liushaojun@mail.csu.edu.cn

