DOI: 10.11817/j.issn.1672-7207.2016.10.021
���һ��˫��滮������Ӧ���춯̬��ֽ����㷨
�����죬�������������ո�����ΰ��
(���ϿƼ���ѧ ��Ϣ���������ѧԺ������ ��̶��411201)
ժҪ�����һ���ϲ㺯����Լ�������������ԺͿ���Ҫ���²㺯�������ķ�����˫��滮���⣬����ͨ��Karush-Kuhn-Tucher(KKT)������˫��滮����ת��Ϊ����Լ�������Թ滮���⣬����Ϸǹ̶����ӳ�䷣�������;�ȷ����������Լ������������Լ����������Ȼ�����һ�ָĽ��Ķ�̬��ֽ����㷨�Ż���ϵ����Լ���Ż����������⡣��8������ʵ��������ֵ���㲢�������㷨���бȽϡ����Խ�����������᷽����һ��������˫��滮�������Ч������
�ؼ��ʣ�˫��滮��KKT������������������ֽ����㷨
��ͼ����ţ�TP18 ���ױ�־�룺A ���±�ţ�1672-7207(2016)10-3436-09
A self-adaptive mutation dynamic differential evolution algorithm for a class of bi-level programming problem
WU Lianghong, XU Rui, ZUO Cili, ZEN Zhaofu, DUAN Weitao
(School of Information and Electrical Engineering,
Hunan University of Science and Technology, Xiangtan 411201, China)
Abstract: Considering a class of nonlinear bi-level programming problem with non-convex and non-differentiable upper-level function and constraints, convex and differentiable lower-level function and constraints was studied. The Karush-Kunh-Tucker (KKT) conditions were firstly used to transform the bi-level programming problem into a single-level optimization problem. Then, the non-fixed multi-segment mapping penalty function and fixed penalty function methods were combined to deal with the constraints. Thereafter, an improved dynamic differential evolution algorithm was proposed to solve the sequence non-constraint problems. Eight benchmarks problems were used to test the proposed method. The results show that, the proposed method is very effective for solving such class of bi-level programming problem compared with other algorithms.
Key words: bi-level programming; KKT conditions; penalty function method; differential evolution algorithm
˫��滮����(BLPP)��һ��������ӵݽṹ��ϵͳ�Ż����⡣��������ģ��������ʵ��ϵͳ�Ľײ��ϵ��ȫ������־����ߵ���Ը�����ھ��á����¡���ͨ���������̵��ڶ��������ʮ����Ҫ�����������Ӧ�ñ���[1-2]��һ����˵�����˫��滮�dz����ѣ�����Ҫ����2�����ԭ��һ���棬˫��滮������1��NP-hard���⣬HANSEN��[3]֤����ʹ�����˫�����Թ滮Ҳ��ǿNP-Hard���⡣
VICENTE��[4]ָ������Ѱ��˫�����Թ滮����ľֲ����Ž�Ҳ��1��NP-Hard���⡣��һ���棬�����ϲ��Ż������Ŀ�꺯��ȡ�����²��Ż�����Ľ⺯����������⺯��һ���Ƿ������Ҳ����ģ���˫���Ż�������1�����Ż����⡣˫���Ż����Ȿ�ʵķ����Լ��Ǵ������Ը�����ֵ�������������ѣ���ˣ����ڷ�����˫��滮���⣬�����Ч����㷨���ǵ�ǰ���о��ȵ㡣�ڹ�ȥ��20 �����У����Ƕ�˫��滮��������������о�����ȡ����һЩ���ۡ���ֵ��Ӧ���о��ɹ���������˵�ɷ�Ϊ����3�����͡�1) ������ֵ����ľ�ȷ�㷨�������㷨��������һЩ���������������Ե�˫��滮���⣬��������ԺͶ���˫��滮�ķ�֦���編[3]�ȡ���ͨ�÷���������KKT(Karush-Kuhn-Tucker)���������²�滮���⣬��˫��滮����ת��Ϊ1��Լ������滮���⣬Ȼ������ֵ���㷽��������⡣2) ��ȷ����������ʽ�㷨�Ľ�ϡ�������ͨ��������KKT������˫��滮����ת��Ϊ����滮���⣬Ȼ��������ʽ�㷨���õ���滮���⣬���������˫��滮��GA�㷨[5]�ͻ�Ͻ��������㷨[6]����������˫��滮�Ľ����㷨[7]�ȡ�3) �������ʽ�㷨�������㷨��һ�����˫��滮�����һ���㷨�����ϡ��²�Ŀ�꺯����Լ��û���κ�����Ҫ���ϡ��²��Ż��㷨����������ʽ�㷨��ͨ����ȡǶ��ʽ������һ�������˫��滮�����PSO�㷨[8]������Ŵ��㷨[9]����ֽ����㷨[10]�ȡ�Ȼ���������㷨���ڲ�ȡǶ��ʽ������ÿ���ϲ���嶼�������1���²�����ʽ�㷨�����Ӧ���²����Ž⣬�������ۺܴ���һ���棬���²�����ʽ�㷨����ֲ����Ž⣬��ò�����Ӧ���ϲ�ȫ�����Ž⡣���������о���2�����͵���ⷽ������ֽ���(differential evolution, DE)�㷨����STORN �� PRICE ��ͬ�����һ������ʽ�Ż��㷨[11]��DE�㷨ԭ�����ܿز����٣����������ʵ�֣�ʵʩ��������С�ֱ�ӵ�ȫ���������ǵ�ǰ����Ч�Ľ����㷨֮һ[12]��Ȼ��������ԭ��DE�㷨��ÿһ��������������Ⱥʼ�ձ��ֲ��䣬ֱ������һ����Ⱥ���������ˣ�����Ⱥ���½Ƕȣ�DE�㷨��������һ�־�̬�ṹ����û���������ٵ�ǰ��Ⱥ�Ľ�չ״��������һ��ʱ�ӡ���Ȼ����̬��Ⱥ���·�ʽ�ᵼ���㷨�����ٶȱ�����������ϲ��㣬QIN��[13]���ö�̬������Ⱥ��ʽ��DE/best/1/bin�������ƽ��иĽ������һ�ֶ�̬��ֽ�������(dynamic differential evolution,DDE)��DDE�������¸��µ���Ⱥ��������ʸ�����Ӷ��ӿ��㷨����������[14]���������һ���ϲ㺯����Լ�������������ԺͿ���Ҫ����²㺯�������ķ�����˫��滮���⣬ͨ��KKT����[15-16]��˫��滮����ת��Ϊ���������Լ���Ż����⣬�ֱ�Ӧ�÷ǹ̶����ӳ�䷣�������Բ���ʽԼ���Լ���ȷ���������Ե�ʽԼ��������Լ����������Ȼ��Ӧ�ö�̬��ֽ����㷨�Եȼ�ϵ����Լ���Ż����������⡣Ϊ��һ������㷨���������ܣ����DDE��2�ֲ�ͬ��������ŵ㣬��������Ӧ����ƽ���㷨��ȫ�������;ֲ��������������һ�ָĽ���DDE�㷨����8��Benchmarks����ʵ��������ֵʵ�顣
1 ˫��滮����
˫��滮����������������г������еĹ�ͷ��Ϊ����˫��滮ģ���У��ϡ��²�����߿�����Ӧ�ľ��߱��������Ż����Ե�Ŀ�꺯�������У��²��Ż���������Ż�������ϲ��Ż�����Ŀ��н�ռ䡣�²���������Ƚ��о��ߣ������ϲ�����߱��뿼���²�Ŀ��ܷ�Ӧ���²�����߸����ϲ�ľ��߽�����Ӧ�����Ż�����Ŀ�꺯������Ϊ˫���ɹ�ѡ��IJ��Լ���������ģ��ϲ�ľ���Ӱ���²��ѡ�ľ��ߺ�Ŀ��ʵ�֣���֮��Ȼ��
���ϲ����ʸ��Ϊx=(x1������xn)��Rn���²����ʸ��Ϊy=(y1������ym)��Rm��BLPP����ѧģ�Ͷ������£�
 (1)
(1)
���У�F(x, y)��G(x, y)�ֱ�Ϊ˫��滮���ϲ�Ŀ�꺯����Լ����������f(x, y)��g(x, y)�ֱ�Ϊ�²�Ŀ�꺯����Լ�������������к�����Ϊ���Ժ������������Ϊ����˫��滮������Ϊ������˫��滮(NBLP)��������Ҫ�о�һ��F(x, y)��G(x, y)û���ԺͿ��Ե�����Ҫ���f(x, y)��g(x, y)�ǿ�����NBLP���⡣
2 ����ת��
���ڱ����о�����һ���²����������˫��滮�����ϲ���²�Լ�����������ֱ�Ϊp��q�������ÿ���̶����ϲ����ʸ��x���²��Ż�����ɵȼ���1��KKTפ�����⣺
 (2)
(2)
���У� ��1��m��q�������i�е�ֵΪ
��1��m��q�������i�е�ֵΪ ��������g��(x, y)������y��Jacobian�����ת�ã���Ϊ1��qά����������ʾ�����������ӡ�KKT�����������ǵ��²�Ŀ�꺯��Ϊ�滮ʱ���������������ӣ����²��������㷨ֱ�ӽ�������Ż���ʽ��Լ����ͨ������ά���ķ�ʽ�����²�������ʽ(2)���棬ת��Ϊ����ʽ�͵�ʽԼ��������ʽ������ЩԼ������ǡǡ���²������������ģ����������������ŵ��Ȼ��1�����н⡣��ˣ���Ӧ��˫��滮����ȼ�Ϊ����ĵȼ۵���滮���⣺
��������g��(x, y)������y��Jacobian�����ת�ã���Ϊ1��qά����������ʾ�����������ӡ�KKT�����������ǵ��²�Ŀ�꺯��Ϊ�滮ʱ���������������ӣ����²��������㷨ֱ�ӽ�������Ż���ʽ��Լ����ͨ������ά���ķ�ʽ�����²�������ʽ(2)���棬ת��Ϊ����ʽ�͵�ʽԼ��������ʽ������ЩԼ������ǡǡ���²������������ģ����������������ŵ��Ȼ��1�����н⡣��ˣ���Ӧ��˫��滮����ȼ�Ϊ����ĵȼ۵���滮���⣺
 (3)
(3)
���У�Ei(x, y, ��)Ϊʽ(2)�е�ǰ2���ʽ����G(x, y)��g(x, y)�ķ����Բ���ʽ���֣�hj(x, y, ��)Ϊ���ǵķ����Ե�ʽ���֣�Arx+Bry-brΪG(x, y)��g(x, y)���������Բ��֡�
����KKT����������˫��滮����ת��Ϊ����滮���⣬����Ӧ��Լ����������������ά�����ࡣʽ(3)�в���ʽ��Ҫ��Ŀ�꺯�����������Ұ��������������ӽ�Ϊ�Ǹ�������������ʽԼ����Դ��ʽ(2)��mΪy��ά�������ڸ�Լ���Ż����⣬����Լ�������϶����ϲ��Ż������������һ���㷨������⣬��ˣ����IJ��û�Ϸ���������Լ�����д��������в���ʽԼ�����÷ǹ̶�������������ʽԼ�����þ�ȷ����������ͬʱ��Ϊ����ø������ȫ�����Ž⣬�������һ�־��������������ܵ�����Ӧ��̬��ֽ����㷨�Ը����������⡣
3 ��Ϸ�������
һ��أ��ڴ���ʽ(3)�����Ż�����ʱ�����������DZȽϳ�������Լ����������֮һ�������˼·����Ŀ�꺯���м���1���ܷ�ӳ����Լ���ijͷ���Ӷ�����1����Լ���Ĺ���Ŀ�꺯�����������Ż��㷨�������Լ���Ż�������м���Ѱ�ţ����óͷ�������ã�ʹ���㷨�ҵ���������Ž⡣
��ͨ������£�����Ĺ���Ŀ�꺯����ʽΪ
F(x)=f(x)+��(t)H(x) (4)
���У�f(x)ΪԭĿ�꺯������(t)H(x)Ϊ�ͷ����(t)Ϊ�ͷ����ȣ�H(x)Ϊ�ͷ����ӡ���ʽ(4)�еĦ�(t)�̶����䣬��Ƹ÷�������Ϊ��ȷ����������̶���������������Ϊ�ǹ̶������������ǹ̶������������Կ˷��̶����������Ц�(t)����ѡȡ�����⣬��ֵ����������ڿ�����߽����Ŀ�꺯��������̬�����¼������ѡ���֮������ֵ��С����ᵼ�����������������������ڷǹ̶����������У���(t)����������ı仯����̬���ڣ��ɱ����(t)��ѡȡ���⡣
��������(3)�������ɸ���ʽԼ������Լ�������ϸ��ӣ���ֱ��ʹ�÷ǹ̶����ӳ�䷣������������(3)������Լ�������Ĺ����У��÷�����Ȼ�ܱ�֤����(3)�ڲ���ʽԼ�����ڵ�����½�����ЧѰ�ţ����Ƕ������ɸ���ʽԼ���Ĵ������ڽϴ�ƫ�������ʽֱ�Ӹ�д��2����Ӧ�IJ���ʽ����hj(x)=0�ȼ�Ϊhj(x)��0��hj(x)��0���ᵼ����Լ����ǿ���㷨������������������ʵ�����⣬���þ�ȷ����������ǹ̶������������ϵIJ��ԡ����У����ڲ���ʽԼ�����֣����÷ǹ̶����ӳ�䷣�������������ڵ�ʽԼ�����֣����þ�ȷ���������������ȿ���Ч������(3)��Լ�������ֿɼͷ����ȵ�ѡȡ��ʹ������õ���Ч�����������Ļ�Ϸ�������Ϊ
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
���У�F(x, y)Ϊ�ϲ�Ŀ�꺯����tΪ����������g(x)Ϊ���в���ʽԼ��������h(x)Ϊ���е�ʽԼ��������CΪ��ȷ�������ijͷ����ȣ�P1Ϊ�ǹ̶����ӳ�䷣�����ijͷ����ӣ�P2Ϊ��ȷ�������ijͷ����ӡ�ʽ(7)��ʾ����ʽԼ��������Լ����Υ���̶ȣ�ʽ(8)��ʾ���Ӧ�ķ�������ǿ�ȣ�ʽ(9)Ϊ���ӳ�亯����ʽ(10)Ϊ��t�仯�ijͷ����ȡ�ͨ������Լ��������ʽ���ɽ�ʽ(3)Լ���Ż�����ת��Ϊ��Լ���Ż����⡣
4 ����Ӧ��̬��ֽ����㷨
��̬��ֽ���(DDE)�㷨�Ľ���������ԭ��DE��ȫ��ͬ�����ߵ�����������ڸ���Ķ�̬���·�ʽ��ͬ[14]������DDE�㷨����1�������ɵ�����ʸ������Ŀ��ʸ�����и��ŵ���Ӧ�ȣ�������ʸ�����Ŀ��ʸ�����������µ�ǰ��Ⱥ�������Ľ�����������ԭ��DE�㷨��ȣ�DDE�㷨���������������¸��µ���Ⱥ��������ʸ�������������Ĵ洢�ռ���������һ��������Ⱥ����ˣ����и�����������ʡ�Ȼ��������DE/best/1/bin���ԣ���̬������Ⱥ��Ȼ�ӿ����������ʣ���������ʹ�㷨����ֲ����ŵ㡣��ˣ�Ϊ��ƽ���㷨��ȫ�������;ֲ��������������Ľ��DE/rand/1/binȫ����������ǿ��DE/best/1/bin�ֲ���������ǿ�����ƣ����һ�־��������������ܺ�³���Ե�����Ӧ������ƶ�̬��ֽ����㷨(SADDE)�����ʽ(5)��ʾ���Ż����⡣
4.1 ����Ӧ�������
�ڽ�����ÿһ����DDE�㷨ͨ���������Ϊ��ǰ��Ⱥ�е�ÿ������xi(t)=(xi1, xi2, ��, xiD)����1��Ŀ�����vi(t) =(vi1, vi2, ��, viD)(���У�tΪ��ǰ��������)��Ŀǰ��DE�㷨�ѷ�չ���ֲ�ͬ��ʽ�ı�����ơ����У����ڡ�rand�����췽ʽ��DDE�㷨�ܺܺõر�����Ⱥ�����ԣ��Ӷ��н�ǿ��ȫ��������������Ҳ�����������ʽ��������⣻�����ڡ�best�����췽ʽ��DDE�㷨�Ե�ǰ��Ⱥ����Ӧ����ߵĸ��������������н�ǿ�ֲ����������ͽϴ��������ʣ�������������ֲ��������ۺϿ�����2�ֱ�����Ƶ��ص㣬�������һ������Ӧ������ƣ�
 (12)
(12)
 (13)
(13)
ʽ�У���nrandΪ[0,1]���ȷֲ����������ri (i=1��2��3)Ϊ�������������best��ʾ��ǰ��Ⱥ�ж�̬���µ����Ÿ��壻Fr��Fb�ֱ�ΪDE/rand/1/bin��DE/best/1/bin��2�ֱ�����Ƶı��쳣������min�ͦ�max�ֱ�Ϊѡ��������DE/rand/1/bin����С�������ʣ�tΪ��ǰ����������TΪ��������������ʽ(12)��֪���ڽ���ǰ�ڣ��������DE/rand/1/bin������ز��ã���Ч�ر�֤����Ⱥ�Ķ����ԣ�ʹ�㷨���н�ǿ��ȫ�������������Ӷ������ܶ���ҵ�DZ��ȫ�����ŵ㡣���Ž����������ӣ��������DE/best/1/bin��ѡ��ĸ��ʲ������ӣ��㷨�ľֲ�������������ǿ���ӿ����������ʣ�ͬʱҲ������㷨���ȡ�
4.2 �������
DEͨ������ǰ����xi(t)��Ӧ�������vi(t)���н��棬�����������ui(t) =(ui1, ui2, ��, uiD)���Ӷ������Ⱥ�Ķ����ԡ�
 (14)
(14)
���У�j=1��2������D��CRΪ������ʳ�����DE/rand/1/bin��DE/best/1/bin��2�ֱ�����ƵĽ�����ʳ����ֱ���CRr��CRb��ʾ��
4.3 ѡ�����
DE�㷨����̰����ѡ��ʽ���Բ��Ը���ui(t)�Լ���ǰ����xi(t)ѡ����ŵĸ��������һ������������С������Ϊ������ѡ�����Ϊ
 (15)
(15)
5 �㷨����
�ۺ�����˫��滮����ĵ���ת�������ͻ�Ϸ�������Լ�������������������������Ӧ����DDE�㷨�������˫��滮������㷨�������¡�
Step 1������Ӧ��˫��滮���ⰴ��ʽ(2)ת����ʽ(3)���ֵ���滮���⣬�г����еIJ���ʽԼ���͵�ʽԼ����
Step 2������DDE��Ⱥ��ģNP����ֱ���ʸ����������Fr��Fb��������ʳ���CRr��CRb����ÿ�������Ķ������������ʼ��ÿ�����壬��������������T���õ�ǰ����������t=0��
Step 3����ʽ(8)~(10)�������Ը�������ʽԼ���ijͷ����ӣ���ȷ����ȷ�������ijͷ�����C��
Step 4������ʽ(6)��(11)�õ�ÿ�������Ӧ�ijͷ�����P1��P2��
Step 5����ʽ(5)����ÿ�������Ӧ���ϲ�滮Ŀ�꺯������Ӧֵ��������Ӧ��������Ӧֵfbest�����Ÿ���xbest��
Step 6���ж�P1��P2�Ƿ�ﵽ����Ҫ����߽��������Ƿ�ﵽ���趨�����������������ǣ�����ֹ������ִ����һ����
Step 7������Ⱥ�еĸ���xi(t)ִ��Step 7~Step 10������t+1����Ⱥ��
Step 8������Ⱥ�����ѡȡ3����xi(t)��ͬ�ĸ��壬����ʽ(12)��(13)���б�����������ɱ�����塣
Step 9������(14)ʽ���н������������ʵ�����ui(t)��
Step 10������ʽ(15)����ѡ�����������t+1������Xi(t+1)��
Step 11��t=t+1������Step 3��
6 ���ݷ���
6.1 ���Ժ���
Ϊ��֤���㷨����Ч�������˫��滮���⣬ѡȡ8���������������ֵ����ʵ�顣����������Ķ������¡�
1) TP1��

subject to

 ��
��
2) TP2��

subject to

0��x��
3) TP3��

subject to

4) TP4��

subject to

0��x��1��
5) TP5��

subject to
6) TP6��

subject to

0��xi��i=1��2��
7) TP7��

subject to

0��x��
8) TP8��

subject to

0��x��8��
6.2 ���Խ��������
ʵ���У�SADDE�㷨�IJ����������£���Ⱥ��ģNP=50������������T=200��2�ֱ������ѡ����ͬ�ı��쳣��Fr=Fb=0.5������Ӧ���������DE/rand/1/bin���Ե���С�����ѡ����ʦ�min=0.1�ͦ�max=0.8�����ڽ�����ʳ�����Ϊ��ͻ��DE/rand/1/bin��ȫ������������ѡȡ��С��CRr�Ա�����Ⱥ�Ķ����ԣ�����CRr=0.1��Ϊ��ͻ��DE/best/1/bin�ľֲ�����������ѡ��ϴ��CRb������������ʺ;��ȣ�����CRb=0.9��Ϊ�˱��������Ӱ�죬SADDE��ÿ�����������������20�Σ�ȡ���ֵΪȫ�����Ž⣬���1��ʾ[17-21]��Ϊ����֤���ķ�������Ч�ԣ���1���������������������㷨�����Ŵ��㷨(NEA��GA��BIGA��AGA��SMGA��PFGA)�����������㷨(TS)�Լ���ֽ����㷨(BIDE��DEBLP)�ȶ���ѡ�����������ü���������1�У�F(x, y)��f(x, y)�ֱ��ʾ�ϲ���²�Ŀ�꺯��ֵ��
��1 ���Ժ���������
Table 1 Results of test functions
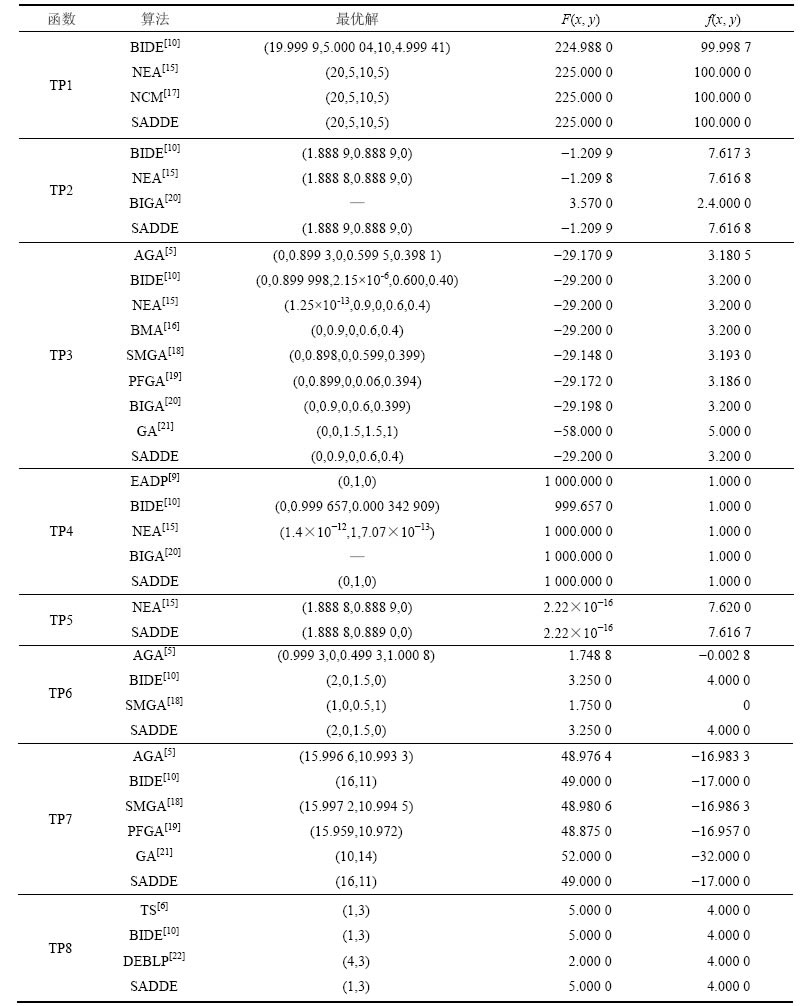
�ɱ�1��֪�����ķ����ܹ�����������������ȫ�����Ž⣬������ý���ȫ����Լ������������ʹ��KKT������˫������ת��Ϊ�������⣬ʹ��ά�����(���������Ӧ�)����SADDE�IJ������ý��٣�������ڲ���KKT�����������㷨(����NEA��BMA��)�����˼��������һЩ�����ķ������ԣ���ˣ������ٶȽϿ��Ҹ���ȷ���������BIDE��SADDE����KKT�����������ЧԼ���������ڼ��㸴�Ӷ���ҪԶ�Ȳ�ȡǶ���Ƶ�BIDE�͡����⣬��Ⱥ�Ķ�̬���º�����Ӧ�������ʹ��SADDE���и�����������ʺ��ߵ��������ȡ���2��ʾΪSADDE��NEA������� P1~P5ʱ����ƽ��CPUʱ��Ƚϡ��ɱ�2��֪��SADDE�������ٶ�����Ҫ����NEA����һ��������˫��滮����ʱ����Ч�㷨��
��2 NEA[15]��SADDEƽ��CPU����ʱ��
Table 2 Average CPU time of NEA[15] and SADDE s

ʵ���У�����TP3��TP7��TP8������GA[21]��DEBLP[22]ȡ���˸��õ��ϲ�����������TP3����������[21]�����ϲ����x��ȡ0����Ҫ�����²�Ŀ�꺯��ȡ��Сֵ���²����y��ȡֵӦ����Ϊ0������������[21]�и�����(1.5,1.5,1)����x�� y��ȡ0�������õ�������ϲ�⡣��ˣ���������[21]��ȡ���˸��õ��ϲ���������ʵ�ϸ����Ž�(0,0,1.5,1.5,1)��1�������н⣬��Υ����˫��滮���²㺯�����ϲ㺯����Լ����ͬ��������TP7��TP8��GA��DEBLP�����˸��õ��ϲ����������Ҳ��1�������н⣬��ˣ���2�ַ���������������ʱ���ܱ�֤Լ�����㡣��SADDE�����ڴ������⡣
���⣬Ϊ֤������Ӧ�������ӵ���Ч�ԣ�����SADDE��DE/rand/1/bin��DE/best/1/bin�������8����������20�ζ���������õ�ƽ��������Ӧ�ȣ���ͼ1~8��ʾ����ͼ1~8��֪�����ڲ�������TP1��TP2��TP5��TP8��SADDE���ܽϿ���ҵ�ȫ�����Ž⣻���ڲ�������TP3��TP4��TP6��TP7������DE/best/1/bin�����ٶȺܿ죬��������ֲ����ţ���DE/rand/1/bin�ٶȽ������ڵ�����������ʱ����������ȫ�����Ž⡣��ˣ�SADDE�ۺ���DE/rand/1/bin��DE/best/1/bin��2�ֱ�����Ƶ��ŵ㣬������Ч�ر�����Ⱥ�Ķ����ԣ��־��нϿ��ȫ���������ܣ�ʹ�㷨��ȫ�����Ž��̽���;ֲ����Ž�Ŀ���֮��ﵽ�ܺõ�ƽ�⣬��һ����⸴�ӷ�����Լ���Ż��������Ч������

ͼ1 ��������1��20��ƽ��������Ӧ�Ƚ�������
Fig. 1 Average convergence curves over 20 runs of DE variants for TP1

ͼ2 ��������2��20��ƽ��������Ӧ�Ƚ�������
Fig. 2 Average convergence curves over 20 runs of DE variants for TP2

ͼ3 ��������3��20��ƽ��������Ӧ�Ƚ�������
Fig. 3 Average convergence curves over 20 runs of DE variants for TP3

ͼ4 ��������4��20��ƽ��������Ӧ�Ƚ�������
Fig. 4 Average convergence curve over 20 runs of DE variants for TP4

ͼ5 ��������5��20��ƽ��������Ӧ�Ƚ�������
Fig. 5 Average convergence curve over 20 runs of DE variants for TP5

ͼ6 ����6��20��ƽ��������Ӧ�Ƚ�������
Fig. 6 Average convergence curve over 20 runs of DE variants for TP6

ͼ7 ��������7��20��ƽ��������Ӧ�Ƚ�������
Fig. 7 Average convergence curve over 20 runs of DE variants for TP7

ͼ8 ��������8��20��ƽ��������Ӧ�Ƚ�������
Fig. 8 Average convergence curve over 20 runs of DE variants for TP8
7 ����
1) ���һ���²㺯�������ķ�����˫��滮���⣬ͨ��KKT������˫��滮����ת��Ϊ������Լ������滮���⡣���ڲ���ʽԼ���͵�ʽԼ�����ֱ���÷ǹ̶����ӳ�䷣�������;�ȷ����������Լ�����д�������ԭ������˫��滮����ת��Ϊϵ����Լ������������Ż����⡣
2) ���һ������Ӧ���춯̬��ֽ����㷨�Ը����������⡣��̬��ֽ����㷨���ö�̬������Ⱥ��ʽ��������һĿ����壬�������ɵ�����ʸ��������и��ŵ���Ӧ�ȣ�������ʸ�����Ŀ��ʸ�����������뵱ǰ��Ⱥ���������Ľ����������������������㷨���������ʡ�����Ӧ��̬������ƽ����DE/rand/1/binȫ����������ǿ��DE/best/1/bin�ֲ���������ǿ�����ƣ�������㷨���������ܺ�³���ԡ�
3) ����������ķ����ܹ���ø��������˫��滮�����ȫ�����Ž⣬�������õ��������ܺ�³���ԣ��������NEA��ƽ��CPUʱ���������̣�֤����SADDE�ļ����Ч�ԡ�
4) SADDE������Ӧ������������DE/rand/1��DE/best/1�����ܹ���ø��õ�����Ч����֤ʵ������Ӧ���ӵ�ѧϰ������ƽ���㷨���ܵ����á���ˣ�SADDE��һ�������������˫��滮�������Ч������
�ο����ף�
[1] VICENTE L N, CALAMAI P H. Bilevel and multilevel programming: a bibliography review[J]. Journal of Global Optimization, 2004, 5(3): 291-306.
[2] COLSON B, MARCOTTE P, SAVARD G. An overview of bilevel optimization[J]. Annals of Operational Research, 2007, 153(1): 235-256.
[3] HANSEN P, JAUMARD B, SAVARD G. New branch and bound rules for linear bilevel programming[J]. SIAM Journal on Science and Statistical Computing, 1992, 13(5): 1194-1217.
[4] VICENTE L, SAVARD G, JUDICE J. Decent approaches for quadratic bilevel programming[J]. Journal of Optimization Theory and Applications, 1994, 81(2): 379-399.
[5] WANG Guangmin, WANG Xianjia, WAN Zhongping, et al. An adaptive genetic algorithm for solving bilevel linear programming problem[J]. Applied Mathematics and Mechanics, 2007, 28: 1605-1612.
[6] RAJESH J, GUPTA K, KUSUMAKAR H, et al. A tabu search based approach for solving a class of bilevel programming problems in chemical engineering[J]. Journal of Heuristics, 2003, 9: 307-319.
[7] WANG Yuping, JIAO Yongchang, LI Hong. An evolutionary algorithm for solving nonlinear bilevel programming based on a new constraint-handling scheme[J]. IEEE Transactions on Systems, Man, and Cybernetics: Part C, 2005, 35: 221-232.
[8] �����, ���O��, ����ǿ. ���ڲ������Ⱥ�㷨�ķ�����˫��滮����������[J]. ϵͳ����������ʵ��, 2013, 33(9): 2292-2298.
LI Changbing, DU Shukang, FU Deqiang. Solution strategy for bi-level nonlinear programming problem based on hierarchical particle swarm optimization[J]. Systems Engineering: Theory & Practice, 2013, 33(9): 2292-2298.
[9] LI Hecheng, LEI Fang. An evolutionary algorithm for solving bilevel programming problems using duality conditions[J]. Mathematical Problems in Engineering, 2012, 20: 1101-1114.
[10] JAQUELINE S A, EDUARDO K, HELIO J C B. Differential evolution for bilevel programming[C]//2013 IEEE Congress on Evolutionary Computation, 2013: 470-477.
[11] STORN R, PRICE K. Differential evolution:a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11(4): 341-359.
[12] DAS S, SUGANTHAN P N. Differential evolution:a survey of the state-of-the-art[J]. IEEE Transactions on Evolutionary Computation, 2011, 15(1): 4-31.
[13] QIN A K, HUANG V L, SUGANTHAN P N. Differential evolution algorithm with strategy adaptation for global numerical optimization[J]. IEEE Transactions on Evolutionary Computation, 2009, 13(2): 398-417.
[14] ������, ��ҫ��. ��̬��ֽ����㷨����Ӧ��[M]. ����: ��ѧ������, 2014: 81-88.
WU Lianghong, WANG Yaonan. Dynamic differential evolution algorithm and its application[M]. Beijing: Science Press, 2014: 81-88.
[15] ����ƽ. ������������ۺͷ���[M]. ����: ��ѧ������, 2011: 169-190.
WANG Yuping. The theoryand methodsof evolutionary computation[M]. Beijing: Science Press, 2011: 169-190.
[16] BARD J F. Pratical bilevel optimization[M]. Norwell: Kluwer, 1998: 1-50.
[17] SHIMIZU K, AIYOSHI E. A new computational method for Syackelberg and min-max problems by use of penalty method[J]. IEEE Transactions on Automatic Control, 1981, 26(2): 460-466.
[18] WANG Guangmin, WANG Xianjia, WAN Zhongping, et al. Genetic algorithms for solving linear bilevel programming[C]// Proceedings of the Sixth International Conference on Parallel and Distributed Computing Applications and Technologies. Washington DC, USA: IEEE Computer Society, 2005: 920-924.
[19] ODUGUWA V, ROY R. Bi-level optimization using genetic algorithm[C]//Proceedings of IEEE Int Conf Artificial Intelligence Systems, 2002: 123-128.
[20] ����. ���һ�����������˫��滮����Ľ����㷨[D]. ����: �������ӿƼ���ѧ�����ѧԺ, 2010: 21-29.
ZHANG Lei. Evolutionary algorithms for one special class of nonlinear bilevel programing problem[D]. Xi��an: Xi��an Electronic and Science University. School of Computer Science and Technology, 2010: 21-29.
[21] KOH A. Solving transportation bi-level programs with differential evolution[C]//2007 IEEE Congress on Evolutionary Computation, 2007: 2243-2250.
(�༭ �²ӻ�)
�ո����ڣ�2015-11-20�������ڣ�2016-01-15
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61203309��51374107��61403134)������ʡ�����������������������Ŀ(12B043)������ʡ�о������д�����Ŀ(CX2015B488)(Projects(61203309, 51374107, 61403134) supported by the National Natural Science Foundation of China; Project(12B043) supported by Education Department of Outstanding Youth Foundation of Hunan Province; Project(CX2015B488) supported by Innovation Foundation of Hunan Province For Postgraduate)
ͨ�����ߣ������죬��ʿ�������ڣ����������Ż��㷨����Ŀ���Ż������ܿ������ۼ�Ӧ���о��ȣ�E-mail: lhwu@hnust.edu.cn

