єгС№НшВзѕІТєґ«¶ЇПµНіµДЙсѕНшВ绬ģїШЦЖ
ХФБўѕь1, 2, 3Ј¬Ао№ъѕь1Ј¬ЅЄјМєЈ2, 3
(1. №ю¶ы±х№¤ТµґуС§ Жыіµ№¤іМС§ФєЈ¬ЙЅ¶« НюєЈЈ¬264209Ј»
2. №ю¶ы±х№¤ТµґуС§ »ъµз№¤іМС§ФєЈ¬єЪБъЅ №ю¶ы±хЈ¬150080Ј»
3. ХгЅґуС§ БчМеґ«¶Їј°їШЦЖ№ъјТЦШµгКµСйКТЈ¬ХгЅ єјЦЭЈ¬310027)
ХЄТЄЈєёщѕЭєгС№НшВзМхјюПВµДѕІТєґ«¶ЇПµНіµДМШµгЈ¬ЅЁБўУГУЪЧЄЛЩїШЦЖµД¶юЧФУЙ¶И¶ЇБ¦С§ДЈРНЎЈХл¶ФєгС№НшВзѕІТєґ«¶ЇПµНіµДІОКэЙг¶ЇєНІ»И·¶ЁРФЈ¬СЎФсТєС№±Г/ВнґпµДЅЗЛЩ¶ИєНЅЗјУЛЩ¶ИОЄїШЦЖ±дБїЈ¬ЙијЖТ»ЦЦЙсѕНшВзЧФККУ¦»¬ДЈїШЦЖЖчЈ¬ІЙУГѕ¶Пт»щєЇКэЙсѕНшВз(RBFNN)ИЎґъ»¬ДЈЗР»»їШЦЖІї·ЦЈ¬АыУГЖдФЪПЯС§П°№¦ДЬЈ¬¶ФПµНіµДІ»И·¶ЁТтЛШЅшРРЧФККУ¦І№іҐЈ¬У¦УГАоСЗЖХЕµ·тОИ¶ЁРФАнВЫНЖµјНшВзИЁЦµµДФЪПЯЧФККУ¦ВКЈ¬±ЈЦ¤±Х»·їШЦЖПµНіµДОИ¶ЁРФЎЈФЪДЈДвКФСйМЁЙПЅшРРБЛЅЧФѕРЕєЕєНР±ЖВРЕєЕµДЧЄЛЩїШЦЖПмУ¦·ЦОцЈ¬ІўУліЈ№жPIDїШЦЖТФј°»щУЪЙсѕНшВзµДPID(NNPID)їШЦЖЅшРР¶Ф±ИЎЈКФСйЅб№ы±нГчЈєЛщЙијЖµДїШЦЖЖчѕЯУРБјєГµДїШЦЖР§№ыЈ¬ДЬК№ПµНіѕЯУРБјєГµДёъЧЩРФєНЗїµДВі°фРФЈ¬УРР§µШПыіэёЯЖµ¶¶ХсПЦПуЎЈ
№ШјьґКЈєєгС№НшВзЈ»ѕІТєґ«¶ЇЈ»ѕ¶Пт»щєЇКэЙсѕНшВзЈ»»¬ДЈ±дЅб№№їШЦЖЈ»Ві°фРФ
ЦРНј·ЦАаєЕЈєTH137 ОДПЧ±кЦѕВлЈєA ОДХВ±аєЕЈє1672-7207(2012)01-0137-06
Neural network sliding mode control for constant pressure hydrostatic transmission system
ZHAO Li-jun1, 2, 3, LI Guo-jun1, JIANG Ji-hai2, 3
(1. School of Automobile Engineering, Harbin Institute of Technology, Weihai 264209, China;
2. School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150080, China;
3. The State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Abstract: A two degrees of freedom vehicle dynamic model was set up for speed control according to the characteristics of constant pressure hydrostatic transmission system. Then selecting angular velocity and angular acceleration of hydraulic pump/motor as the control variables, a novel neural network sliding mode control strategy was proposed, which was applied to ensure tracking capability to constant pressure hydrostatic transmission system in the presence of plant parameter variations and uncertainties. A radial basis function neural network (RBFNN) was utilized to realize the corrective control of sliding mode control, and compensate uncertainties of the system with adaptive learning algorithm, the parameter on-line adaptive laws were derived in the sense of Lyapunov stability theorem to guarantee the system stability. The speed control and response analysis of step signal and ramp signal were conducted in the simulation test platform, and contrasted with the conventional PID control and the PID based on the neural network (NNPID) control. The experimental results show that the proposed control scheme has good tracking performance and strong robustness, and eliminates chattering effectively.
Key words: constant pressure; hydrostatic transmission; radial basis function neural network; sliding mode control; robustness
ИХТжСПѕюµДДЬФґєН»·ѕіОКМвЈ¬Н№ПФСР·ўёЯРФДЬµД»·±ЈіµБѕµДЦШТЄРФЎЈФЪґу№¦ВКµДЖЅМЁФЛКдіµЎўЖЅ°еіµј°·Й»ъЗЈТэіµµИЖЅ°еФЛКдАаМШЦЦіµБѕЦРЈ¬ІЙУГ»щУЪєгС№НшВзєН¶юґОµчЅЪјјКхµДѕІТєґ«¶ЇПµНіЧчОЄµЧЕМµДЦ§іЕјјКхЈ¬їЙТФКµПЦЦЖ¶ЇДЬµД»ШКХАыУГЈ¬ІўµчХы·ў¶Ї»ъµД№¤ЧчµгЈ¬ґУ¶шЅµµНИјУНПыєДЎўјхЙЩЕЕ·ЕЈ¬Тт¶шѕЯУРЦШТЄµДАнВЫСРѕїјЫЦµєНУ¦УГЗ°ѕ°[1]ЎЈµ«КЗЈ¬ёГПµНіѕЯУРІОКэІ»И·¶ЁРФЎў·ЗПЯРФЎўК±±дРФµИґэХчЈ¬ДСТФЅЁБўѕ«И·µДКэС§ДЈРНЈ¬ФЛУГѕµдїШЦЖєН»щУЪЧјИ·ДЈРНµДїШЦЖ·Ѕ·ЁЈ¬ДСТФ»сµГАнПлµДїШЦЖРФДЬ[2]Ј¬КµјКУ¦УГИФУРЅПґуµДА§ДСЎЈДїЗ°Ј¬№ъДЪНвФЪёГ·ЅГжµДСРѕїЈ¬ЦчТЄјЇЦРУЪПµНіДЈРНµД№№ЅЁУлРФДЬ·ВХж·ЦОцЈ»ІўЗТЈ¬ОЄїШЦЖПµНіЅЁДЈєН·ЦОц·Ѕ±гЈ¬іЈЅ«¶юґОФЄјю(ТєС№±Г/Внґп)µД±дБїµчЅЪПµНіјт»ЇОЄµҐ±Х»·Ѕб№№Ј¬УлКµјКПµНіЅб№№УРЅПґуІо±рЈ¬ФміЙ·ЦОцІ»№»ЧјИ·ЎЈОЄґЛЈ¬±ѕОДЅ«ёГПµНі°ґХХЛ«±Х»·Ѕб№№ЅшРР№№ЅЁЎЈ»¬ДЈїШЦЖ(SMC)ЧчОЄТ»ЦЦ·ЗПЯРФїШЦЖЈ¬ѕЯУРПмУ¦їмЛЩЎў¶ФІОКэ±д»Їј°ИЕ¶ЇІ»БйГфєНТЧУЪКµПЦµИУЕµг[3]ЎЈДСµгФЪУЪЈ¬±дЅб№№їШЦЖЦРУГУЪґ¦АнІ»И·¶ЁТтЛШµДЗР»»їШЦЖЈ¬»бК№ПµНіІъЙъёЯЖµ¶¶ХсПЦП󣬴ӶшУ°ПмїШЦЖµДЧјИ·РФЈ¬ФцјУДЬБїПыєДЈ»¶шЗТЈ¬ПµНіЦРµДёЯЖµОґЅЁДЈ¶ЇМ¬ИЭТЧ±»ј¤·ўЈ¬УЙґЛЖЖ»µПµНіµДРФДЬЈ¬ЙхЦБІъЙъХсµґ»тК§ОИЈ¬Лр»µїШЦЖЖчІї јю[4]ЎЈИЛ№¤ЙсѕНшВзїЙТФУГАґ±ЖЅьИОТвёґФУµД·ЗПЯРФПµНіЈ¬ІўЗТѕЯУРБјєГµДЧФККУ¦РФєНБЄП빦ДЬЈ¬Ѕ«¶юХЯУР»ъЅбєПЈ¬їЙТФУРР§јхЙЩ»¬ДЈїШЦЖµД¶¶ХсЈ»Н¬К±Ј¬»¬ДЈїШЦЖїЙТФМбёЯЙсѕНшВзС§П°µДКХБІЛЩ¶ИЈ¬К№ПµНіµДїШЦЖРФДЬµГµЅМбёЯЎЈ±ѕОДЧчХЯХл¶ФєгС№НшВзѕІТєґ«¶ЇПµНіЈ¬ЅшРРѕ¶Пт»щєЇКэ(RBF)ЙсѕНшВ绬ģїШЦЖ·Ѕ·ЁСРѕїЎЈАыУГRBFЙсѕНшВзФЪПЯ№АјЖПµНіµДІ»И·¶Ё¶ЇБ¦С§Ј¬ІЙУГАоСЗЖХЕµ·тОИ¶ЁРФАнВЫНЖµјНшВзИЁЦµµДФЪПЯЧФККУ¦ВЙЈ¬ЧоєуЅшРРКФСйСйЦ¤ЎЈЦјФЪНЖЅшєгС№НшВзПВТєС№Зэ¶ЇїШЦЖјјКхФЪМШЦЦіµБѕЦРµДУ¦УГ»щґЎСРѕїЎЈ
1 ПµНіДЈРН
єгС№НшВзѕІТєґ«¶ЇПµНіµДЛЩ¶ИїШЦЖЅб№№їтНјИзНј1ЛщКѕЎЈµзБчРЕєЕНЁ№эїШЦЖЖчґ¦АнєуЛНИлµзТєЛЕ·ю·§Ј¬їШЦЖ±дБїУНёЧ»оИыµДТЖ¶ЇАґёД±дР±ЕМЗгЅЗЈ¬ґУ¶шµчЅЪТєС№±Г/Внґп(¶юґОФЄјю)µДКдіцЧЄѕШєНЧЄЛЩЈ¬Ѕш¶шЗэ¶Ї/ЦЖ¶ЇіµБѕ[5]ЎЈ№ШУЪѕІТєґ«¶ЇПµНіµДСРѕїЈ¬ОЄЅЁДЈєНїШЦЖ·Ѕ±гЈ¬¶аІЙУГµҐ±Х»·Ѕб№№µДЧЄЛЩїШЦЖЈ»µ«КЗµҐ±Х»·µДПµНіЧиДбЅПРЎЈ¬ПµНіёХ¶ИРЎЈ¬¶ЇМ¬МШРФЅПІоЎЈОЄґЛЈ¬јУИл±дБїїШЦЖУНёЧ·ґАЎ№№іЙЛ«±Х»·їШЦЖЈ¬ТФМбёЯПµНіПмУ¦К±јдЈ¬јхРЎПµНіµДі¬µчБїЈ¬ёДЙЖПµНіµД¶ЇМ¬їШЦЖМШРФ[6]ЎЈ
КЧПИЧчИзПВјЩЙиЈє(1) ПµНіГ»УРТєС№УНµДР№В¶Ј»(2) ТєС№УНОЄІ»їЙС№ЛхБчМеЈ»(3) іµБѕЛщКЬµДїХЖшЧиБ¦їЙТФєцВФЎЈФтПµНіµД¶юЧФУЙ¶И¶ЇБ¦С§ДЈРНОЄЈє
 (1)
(1)
КЅЦРЈєpsОЄПµНіС№Б¦Ј¬PaЈ»Jp/mОЄТєС№±Г/ВнґпЧЄ¶ЇІїјюµДЧЄ¶Ї№ЯБїЈ¬kgЎ¤m2Ј»BОЄТєС№±Г/ВнґпµДр¤РФЧиДбПµКэЈ¬N/(mЎ¤s)Ј»TfОЄТєС№±Г/ВнґпЛщКЬНвёєФШБ¦ѕШЈ¬NЎ¤mЈ»¦ИОЄТєС№±Г/ВнґпЧЄЅЗЈ¬radЈ»DmaxОЄТєС№±Г/ВнґпЧоґуЕЕБїЈ¬m3/radЈ»DОЄТєС№±Г/ВнґпЕЕБїЈ¬m3/radЈ»AОЄ±дБїУНёЧ»оИыУРР§ЧчУГГж»эЈ¬m2Ј»Xg maxОЄ±дБїУНёЧЧоґуО»ТЖБїЈ¬mЈ»KvОЄЛЕ·ю·§БчБїФцТжЈ¬m3/(s?A)Ј»KpОЄ±дБїУНёЧРЎ±Х»·±ИАэїШЦЖЖчФцТжПµКэЈ»KwОЄРЎ±Х»·О»ТЖґ«ёРЖчµД·ґАЎПµКэЈ¬V/mЈ»rОЄіµВЦ°лѕ¶Ј¬mЈ»¦ВОЄЖВµАЅЗЈ¬radЈ»fОЄ№ц¶ЇЧиБ¦ПµКэЈ»mОЄ¶ЇБ¦НЁµА·ЦµЈЗэ¶ЇµДіµБѕЦКБїЈ¬kgЈ»dОЄРэЧЄЦКБї»»ЛгПµКэЎЈТтПµНіЦРК№УГВЦ±ЯјхЛЩЧ°ЦГЈ¬№КІ»їјВЗЛЩ±И±д»ЇЎЈ
¶ФЙПКц·ЅіМЅшРРАКЅ±д»»єуЈ¬µГєгС№НшВзѕІТєґ«¶ЇіµБѕµДїЄ»·ЛЩ¶ИїШЦЖ·ЅїтНјИзНј2ЛщКѕ[7]ЎЈ
ИЎЧґМ¬±дБїЈє Ј¬x1єНx2·Ц±рОЄТєС№±Г/ВнґпµДКдіцЅЗЛЩ¶ИєНЅЗјУЛЩ¶ИЈ¬їЙµГПµНіµДЧґМ¬·ЅіМОЄЈє
Ј¬x1єНx2·Ц±рОЄТєС№±Г/ВнґпµДКдіцЅЗЛЩ¶ИєНЅЗјУЛЩ¶ИЈ¬їЙµГПµНіµДЧґМ¬·ЅіМОЄЈє
 (2)
(2)
КЅЦРЈє Ј»
Ј» Ј»
Ј»
 Ј»
Ј» Ј»
Ј» Ј»
Ј»
 Ј»
Ј» ЎЈ
ЎЈ

Нј1 єгС№НшВзѕІТєґ«¶ЇПµНіµДЛЩ¶ИїШЦЖЅб№№їтНј
Fig.1 Diagram of hydrostatic transmission velocity control system

Нј2 ЛЩ¶ИПµНіїЄ»··ЅїтНј
Fig.2 Open-loop block diagram of speed system
ФЪіµБѕЗэ¶Ї/ЦЖ¶Ї№¤їцПВЈ¬ПµНіµДС№Б¦psІў·Зєг¶ЁЈ¬НвёєФШёЙИЕЕ¤ѕШТІЛжЧЕВ·ГжµДЖВ¶ИЎўјУјхЛЩ¶ш·ўЙъ±д»ЇЈ»ПµНіµДБчБїПµКэЎўР№В©ПµКэТІѕЯУРІ»И·¶ЁРФЈ¬ЗТЛжЧЕ№¤ЧчЧґМ¬ЎўОВ¶ИµИ¶ш»єВэ±д»Ї[8]Ј¬ґУ¶шК№ПµНііКПЦіцЗїµД·ЗПЯРФЎЈ±ѕОДїШЦЖµДДї±кКЗЈєК№ПµНіДЬ№»їЛ·юЙПКцІ»И·¶ЁТтЛШµДУ°ПмЈ¬ѕЯУРБјєГµДёъЧЩРФєНВі°фРФЎЈ
2 ЙсѕНшВ绬ģїШЦЖЖч
2.1 ЙсѕНшВ绬ģїШЦЖЖчЅб№№УлФАн
ЙијЖ»¬ДЈїШЦЖЖчЈ¬КЗОЄБЛК№±»їШПµНіВъЧ㻬ģµЅґпМхјю Ј¬јґЈєК№ПµНіЧґМ¬їХјдЦРµДИОТвµг±ШЅ«Пт»¬ДЈГж
Ј¬јґЈєК№ПµНіЧґМ¬їХјдЦРµДИОТвµг±ШЅ«Пт»¬ДЈГж їїЅьЈ¬ІўЧоЦХµЅґп»¬ДЈГжЎЈОЄБЛ»сµГЅПєГµДїШЦЖРФДЬЈ¬±ИИзМбёЯПµНіЧґМ¬µЅґп»¬ДЈГжµДЛЩ¶ИЈ¬іЈИЎЅПґуµДїШЦЖФцТжkАґїЛ·юІ»И·¶ЁРФєННвІїИЕ¶ЇµДУ°ПмЈ¬µ«»бёшїШЦЖПµНіґшАґІ»±ШТЄµД¶¶ХсПЦПуЈ¬У°ПмПµНіµДїШЦЖѕ«¶И[9]ЎЈОЄґЛЈ¬±ѕОДЙијЖТ»ЦЦІ»ТААµПµНіДЈРНµДRBFЙсѕНшВ绬ģїШЦЖЖчЈ¬Ѕ«ЗР»»єЇКэЧчОЄRBFНшВзµДКдИлЈ¬»¬ДЈїШЦЖЖчЧчОЄRBFНшВзµДКд іц[10]Ј¬ІЙУГRBFЙсѕНшВзАґ№АјЖПµНіµДІ»И·¶Ё¶ЇБ¦С§Ј¬їШЦЖВЙµДІОКэНЁ№эПµНіЧґМ¬РЕПўµДФЪПЯЧФµчХы»сµГЈ¬ЖдЅб№№ФАнИзНј3ЛщКѕЎЈ
їїЅьЈ¬ІўЧоЦХµЅґп»¬ДЈГжЎЈОЄБЛ»сµГЅПєГµДїШЦЖРФДЬЈ¬±ИИзМбёЯПµНіЧґМ¬µЅґп»¬ДЈГжµДЛЩ¶ИЈ¬іЈИЎЅПґуµДїШЦЖФцТжkАґїЛ·юІ»И·¶ЁРФєННвІїИЕ¶ЇµДУ°ПмЈ¬µ«»бёшїШЦЖПµНіґшАґІ»±ШТЄµД¶¶ХсПЦПуЈ¬У°ПмПµНіµДїШЦЖѕ«¶И[9]ЎЈОЄґЛЈ¬±ѕОДЙијЖТ»ЦЦІ»ТААµПµНіДЈРНµДRBFЙсѕНшВ绬ģїШЦЖЖчЈ¬Ѕ«ЗР»»єЇКэЧчОЄRBFНшВзµДКдИлЈ¬»¬ДЈїШЦЖЖчЧчОЄRBFНшВзµДКд іц[10]Ј¬ІЙУГRBFЙсѕНшВзАґ№АјЖПµНіµДІ»И·¶Ё¶ЇБ¦С§Ј¬їШЦЖВЙµДІОКэНЁ№эПµНіЧґМ¬РЕПўµДФЪПЯЧФµчХы»сµГЈ¬ЖдЅб№№ФАнИзНј3ЛщКѕЎЈ
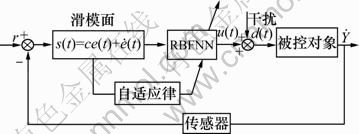
Нј3 ЙсѕНшВ绬ģїШЦЖЖчЅб№№Нј
Fig.3 Neural network sliding mode controller diagram
2.2 ЙсѕНшВ绬ģїШЦЖЖчµДЙијЖ
ФЪКЅ(2)ЦРБо
 (3)
(3)
КЅЦРЈєf(x)ОЄУРЅзЧґМ¬±дБїµДєЇКэЈ¬ґЛґ¦КУЦ®ОЄОґЦЄµДК±±дєЇКэf(t)Ј»bОЄХэКэЈ»d(t)ОЄНвЅзёЙИЕЎЈ
БоТєС№±Г/ВнґпµДЧЄЅЗО»ЦГЦёБо Ј¬¶ЁТе
Ј¬¶ЁТе ОЄПаЖЅГж±дБїЈ¬ЙијЖ»¬ДЈГжОЄ
ОЄПаЖЅГж±дБїЈ¬ЙијЖ»¬ДЈГжОЄ
 (4)
(4)
ЖдЦРЈє ЎЈ»¬¶Ї±дБїsЅ«ЧчОЄЙсѕНшВзµДКдИлАґјЖЛгїШЦЖВКuЎЈ
ЎЈ»¬¶Ї±дБїsЅ«ЧчОЄЙсѕНшВзµДКдИлАґјЖЛгїШЦЖВКuЎЈ
ІЙУГRBFNNАґДЈД⻬¶Ї±дБїsєНПµНіїШЦЖВЙЦ®јдµД№ШПµЎЈRBFNNКЗТ»ЦЦИэІгЗ°АЎНшВзЈ¬±ѕОДІЙУГµДRBFNNЅб№№ОЄ1-5-1Ј¬ЖдЅб№№ИзНј4ЛщКѕЎЈЙсѕНшВзµДіхКјЦµОЄЛж»ъЦµЈ¬ёЯЛ№єЇКэІОКэИЎ Ј¬
Ј¬ Ј¬ІЙУГpersistentГьБоКµПЦНшВзИЁЦµµДёьРВЎЈ
Ј¬ІЙУГpersistentГьБоКµПЦНшВзИЁЦµµДёьРВЎЈ
ФЪRBFNNЦРЈ¬ёЯЛ№»щєЇКэУГЧчѕ¶Пт»щЙсѕФЄµДґ«µЭєЇКэЎЈЖдКдИлОЄ»¬¶Ї±дБїПтБїєНёЯЛ№»щєЇКэПтБїµДѕаАлЈ¬јґ
 (5)
(5)
КЅЦРЈєsОЄКдИлµД»¬¶Ї±дБїПтБїЈ»cjОЄНшВзµДµЪjёцЅЪµгµДЦРРДПтБїЈ¬ ЎЈКдИлІгЙсѕФЄєНТює¬ІгЙсѕФЄЦ®јдµДИЁЦµПтБїwjЙиОЄіЈЦµ1ЎЈТює¬ІгЙсѕФЄєНКдіцІгЙсѕФЄЦ®јдµДИЁЦµПтБїwkУЙЧФККУ¦Лг·ЁЅшРРµчХыЎЈФтRBFNNµДКдіцОЄ
ЎЈКдИлІгЙсѕФЄєНТює¬ІгЙсѕФЄЦ®јдµДИЁЦµПтБїwjЙиОЄіЈЦµ1ЎЈТює¬ІгЙсѕФЄєНКдіцІгЙсѕФЄЦ®јдµДИЁЦµПтБїwkУЙЧФККУ¦Лг·ЁЅшРРµчХыЎЈФтRBFNNµДКдіцОЄ
 (6)
(6)
КЅЦРЈє ОЄёЯЛ№»щєЇКэЈ»
ОЄёЯЛ№»щєЇКэЈ»
jОЄТюІШІгµДµЪjёцЙсѕФЄЈ» ОЄЅЪµгjµД»щїнІОКэЎЈnОЄТює¬ІгЙсѕФЄµДёцКэЎЈ
ОЄЅЪµгjµД»щїнІОКэЎЈnОЄТює¬ІгЙсѕФЄµДёцКэЎЈ
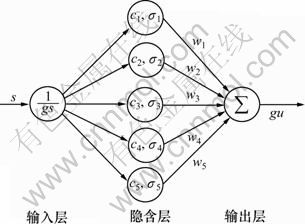
Нј4 RBFЙсѕНшВзЅб№№
Fig.4 RBF neural network structure
Ѕ«»¬ДЈїШЦЖЖчЙијЖОЄRBFНшВзµДКдіцЈ¬јґ
 (7)
(7)
ёщѕЭLyapunovАнВЫЈ¬»¬ДЈГжµДµЅґпМхјюОЄ Ј¬Из№ыСЎИЎµДїШЦЖВЙДЬ№»ВъЧгµЅґпМхјюЈ¬їШЦЖПµНіЅ«»бЗчЅьУЪПаЖЅГжµДФµгЎЈИзЙПЛщКцЈ¬RBFNNКЗУГАґ±ЖЅь»¬¶Ї±дБїsєНїШЦЖВЙЦ®јдµД·ЗПЯРФУіЙдµДЈ¬Тт¶шRBFNNµДИЁЦµУ¦ёГёщѕЭµЅґпМхјюЅшРРµчХыЎЈЧФККУ¦Лг·ЁУГАґЛСС°ЧоУЕµДИЁЦµІў±ЈЦ¤ОИ¶ЁРФЎЈїШЦЖµДДї±кКЗК№Ј¬јґRBFНшВзµДИЁЦµµчХыЦё±кОЄЈє
Ј¬Из№ыСЎИЎµДїШЦЖВЙДЬ№»ВъЧгµЅґпМхјюЈ¬їШЦЖПµНіЅ«»бЗчЅьУЪПаЖЅГжµДФµгЎЈИзЙПЛщКцЈ¬RBFNNКЗУГАґ±ЖЅь»¬¶Ї±дБїsєНїШЦЖВЙЦ®јдµД·ЗПЯРФУіЙдµДЈ¬Тт¶шRBFNNµДИЁЦµУ¦ёГёщѕЭµЅґпМхјюЅшРРµчХыЎЈЧФККУ¦Лг·ЁУГАґЛСС°ЧоУЕµДИЁЦµІў±ЈЦ¤ОИ¶ЁРФЎЈїШЦЖµДДї±кКЗК№Ј¬јґRBFНшВзµДИЁЦµµчХыЦё±кОЄЈє
 (8)
(8)
УЙМЭ¶ИПВЅµ·Ё
 (9)
(9)
КЅЦРЈє ОЄЧФККУ¦ЛЩВКЈ¬Јѕ0ЎЈ
ОЄЧФККУ¦ЛЩВКЈ¬Јѕ0ЎЈ
УЙУЪ
 (10)
(10)
ФтRBFНшВзИЁЦµС§П°ЧФККУ¦Лг·ЁОЄ
 (11)
(11)
ЖдЦРЈє ОЄС§П°ЛЩВКЈ¬
ОЄС§П°ЛЩВКЈ¬ Ј¬ТЧЦЄ
Ј¬ТЧЦЄ ЎЈ
ЎЈ
ХвСщЈ¬ТюІШІгєНКдіцІгЙсѕФЄµДИЁЦµѕНїЙТФКµК±ФЪПЯµчХыТФКµПЦRBFNNµДЧФС§П°ДЬБ¦ЎЈ
2.3 ОИ¶ЁРФ·ЦОц
ІЙУГLyapunov·Ѕ·Ё·ЦОцЛщЙијЖµДїШЦЖЖчµДОИ¶ЁРФЎЈИз№ыКЅ(3)ЦРµДК±±дєЇКэТСЦЄЈ¬ФтїЙ¶ЁТеѕ«И·їШЦЖВЙОЄ
 (12)
(12)
Ѕ«КЅ(12)ґшИлКЅ(3)Ј¬їЙµГ
 (13)
(13)
УЙУЪcКЗХэЦµЈ¬ТтґЛ»¬¶Ї±дБїs»бЦрЅҐЗчУЪ0Ј¬УЙКЅ(4)ЦРЗР»»єЇКэµД¶ЁТеїЙЦЄЈ¬ПµНіµДКдіцОуІоТІ»бЦрЅҐЗчУЪ0ЎЈRBFNNКЗУГАґ±ЖЅь»¬¶ЇКдИл±дБїєНїШЦЖВЙЦ®јдµД·ЗПЯРФєЇКэ№ШПµµДЈ¬ЖдїШЦЖВЙuУлѕ«И·їШЦЖВКueqЦ®јдїП¶ЁґжФЪОуІоЈ¬ґУ¶шУЙКЅ(3)єНКЅ(12)їЙµГИзПВµИКЅЈє
 (14)
(14)
АнВЫЙПЈ¬RBFNNДЬТФИОТвѕ«¶И±ЖЅьИОТвБ¬РшєЇКэЎЈТтґЛЧчИзПВјЩЙиЈє
јЩЙи ґжФЪЧоУЕµДИЁЦµПтБї К№µГїШЦЖВЙuєНѕ«И·їШЦЖВКueqЦ®јтµҐОуІоРЎУЪ
К№µГїШЦЖВЙuєНѕ«И·їШЦЖВКueqЦ®јтµҐОуІоРЎУЪ Јє
Јє
 (15)
(15)
КЅЦРЈє Ј¬
Ј¬ ЎЈ
ЎЈ
¶ЁТе ОЄЧоУЕЦµєНµ±З°№АјЖЦµЦ®јдµДИЁЦµОуІоПтБїЈ¬ФтКЅ(14)їЙТФРґОЄЈє
ОЄЧоУЕЦµєНµ±З°№АјЖЦµЦ®јдµДИЁЦµОуІоПтБїЈ¬ФтКЅ(14)їЙТФРґОЄЈє
 (16)
(16)
СЎИЎLyapunovєЇКэОЄЈє
 (17)
(17)
КЅ(17)¶ФК±јдЗуµјµГ
 (18)
(18)
Ѕ«КЅ(11)єНКЅ(16)ґшИлКЅ(18)µГ
 ЎЬ
ЎЬ
 (19)
(19)
Фтµ± К±Ј¬
К±Ј¬ ЎЈХвѕНТвО¶ЧЕLyapunovєЇКэ»бЦрЅҐјхРЎЈ¬ЗР»»єЇКэЅ«»бЦрЅҐКХБІµЅ»¬ДЈГжµДТ»ёцєЬРЎµД±ЯЅзІгДЪЎЈУЙТФЙПµД·ЦОцїЙТФµГіцЛщЙијЖµДїШЦЖЖчКЗОИ¶ЁµДЈ¬ІўЗТПµНіµДОуІо»б±»їШЦЖФЪєЬРЎµД·¶О§ДЪЎЈЛжЧЕЙсѕНшВз·ЗПЯРФУіЙдѕ«¶ИµДМбёЯЈ¬ПµНіµДКдіцОуІоТІ»бЅµµНЎЈ
ЎЈХвѕНТвО¶ЧЕLyapunovєЇКэ»бЦрЅҐјхРЎЈ¬ЗР»»єЇКэЅ«»бЦрЅҐКХБІµЅ»¬ДЈГжµДТ»ёцєЬРЎµД±ЯЅзІгДЪЎЈУЙТФЙПµД·ЦОцїЙТФµГіцЛщЙијЖµДїШЦЖЖчКЗОИ¶ЁµДЈ¬ІўЗТПµНіµДОуІо»б±»їШЦЖФЪєЬРЎµД·¶О§ДЪЎЈЛжЧЕЙсѕНшВз·ЗПЯРФУіЙдѕ«¶ИµДМбёЯЈ¬ПµНіµДКдіцОуІоТІ»бЅµµНЎЈ
3 КФСйСйЦ¤
3.1 ѕІТєґ«¶Ї»мєП¶ЇБ¦іµБѕДЈДвКФСйПµНі
ЧЄЛЩїШЦЖРФДЬКФСйФЪТєС№»мєП¶ЇБ¦іµБѕµДДЈДвКФСйЖЅМЁЙПЅшРРЎЈКФСйМЁПµНіРЕєЕ№ШПµєНУІјю№№іЙИзНј5єННј6ЛщКѕЎЈЅ«ЛщЙијЖµДЙсѕНшВ绬ģїШЦЖЖчЈ¬АыУГC++ BuilderУпСФЅшРР±аіМЈ¬ЦІИлѕІТєґ«¶Ї»мєП¶ЇБ¦іµБѕµДїШЦЖПµНіЦРЈ¬єгС№ПµНі№¤ЧчС№Б¦ОЄ7 MPaЈ¬јУФШЕ¤ѕШОЄ8 NЎ¤mЈ¬ЅшРРѕІТєґ«¶Ї»мєП¶ЇБ¦іµБѕЙсѕНшВ绬ģїШЦЖ(NNSMC)КФСйСРѕїЈ¬ІўУліЈ№жPIDїШЦЖТФј°»щУЪЙсѕНшВзµДPID(NNPID)їШЦЖЅшРР¶Ф±ИЎЈ
3.2 КФСйЅб№ы
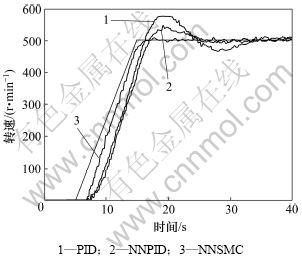
Нј7єННј8ЛщКѕ·Ц±рОЄ3ЦЦїШЦЖµДЅЧФѕПмУ¦єНР±ЖВПмУ¦КФСйЗъПЯЎЈїЙјыЈєPIDїШЦЖК±ПµНіі¬µчБїГчПФФцјУЈ¬ЗТ¶ЇМ¬ОИ¶ЁµчХыК±јді¤Ј¬ПµНіЅшИлОИ¶ЁЗ°ХсµґґОКэФц¶аЈ¬ОИМ¬ОуІоґуЈ»»щУЪЙсѕНшВзµДPIDїШЦЖЈ¬ЛдИ»ФЪі¬µчБїєНХсµґґОКэЙПУРЅПґуёДЙЖЈ¬µ«ЖдПмУ¦ЛЩ¶ИГчПФЦНєуЈ»Па¶ФУЪТФЙПБЅЦЦїШЦЖ·ЅКЅЈ¬ЙсѕНшВ绬ģїШЦЖ»щ±ѕОЮі¬µчЈ¬ПµНіЅшИлОИ¶ЁЗ°Г»УРХсµґЈ¬ПмУ¦ЛЩ¶ИїмЗТЗчЅьР§№ыєГЎЈ

Нј5 ТєС№»мєП¶ЇБ¦іµБѕДЈДвКФСйМЁ№№іЙКѕТвНј
Fig.5 Experimental system schematic diagram of hydrostatic transmission hybrid vehicle

Нј6 ТєС№Зэ¶Ї»мєП¶ЇБ¦іµБѕДЈДвКФСйЖЅМЁКµОпНј
Fig.6 Prototype of hydrostatic transmission hybrid system
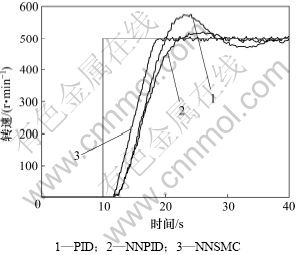
Нј7 ЅЧФѕЧЄЛЩДї±кПВµДЧЄЛЩїШЦЖПмУ¦¶Ф±И
Fig.7 Comparison of speed control responses to step speed
Нј8 Р±ЖВЧЄЛЩДї±кПВµДЧЄЛЩїШЦЖПмУ¦¶Ф±И
Fig.8 Comparison of speed control responses to slope speed
УЙКФСйЅб№ыїЙЦЄЈєФЪПмУ¦ЛЩ¶ИєНОИМ¬ОуІоТФј°¶ФНвЅзї№ёЙИЕДЬБ¦·ЅГжЈ¬ЙсѕНшВ绬ģїШЦЖР§№ыѕщУЕУЪЖХНЁPIDїШЦЖєН»щУЪЙсѕНшВзµДPIDїШЦЖЈ¬ѕЯУРёьЗїµДВі°фРФЎЈ
4 ЅбВЫ
(1) Хл¶ФєгС№НшВзѕІТєґ«¶ЇПµНіµДЧЄЛЩїШЦЖ№эіМЦРµДІОКэЙг¶ЇєНІ»И·¶ЁРФЈ¬ЅшРРБЛRBFЙсѕНшВ绬ģїШЦЖСРѕїЎЈІЙУГRBFЙсѕНшВзФЪПЯ№АјЖПµНіµДІ»И·¶Ё¶ЇБ¦С§Ј¬АыУГАоСЗЖХЕµ·тОИ¶ЁРФАнВЫНЖµјНшВзИЁЦµµДФЪПЯЧФККУ¦ВЙЈ¬И·±Ј±Х»·їШЦЖПµНіµДОИ¶ЁРФЈ¬МбёЯПµНіµДПмУ¦ЛЩ¶ИЈ¬ІўґпµЅПчИх¶¶ХсµДДїµДЎЈ
(2) ЙсѕНшВ绬ģїШЦЖ·Ѕ·Ё¶ФУЪІОКэИЕ¶Їј°ёєФШёЙИЕЈ¬ѕЯУРЅПєГµД¶ЇМ¬ПмУ¦РФДЬЎўЅПёЯµДОИМ¬їШЦЖѕ«¶ИєНЅПЗїµДВі°фРФЈ¬ІўДЬУРР§ПчИхїШЦЖРЕєЕЦРµДёЯЖµ¶¶ХсЎЈёГ·Ѕ·ЁїЙїїТЧРРЈ¬ККУЪ№¤іМУ¦УГЎЈ
ІОїјОДПЧЈє
[1] Kepner R P. Hydraulic power assist: A demonstration of hydraulic hybrid vehicle regenerative braking in a road vehicle application[C]. SAE Paper, 2002-01-3128.
[2] Ов№вЗї, Нх»бТе. іµБѕѕІТєЗэ¶ЇУлЦЗДЬїШЦЖПµНі[M]. ЙПєЈ: ЙПєЈїЖС§јјКхОДПЧіц°жЙз, 1998: 1-30.
WU Guang-qiang, WANG Hui-yi. Hydrostatic drive vehicle and intelligent control system[M]. Shanghai: Shanghai Scientific and Technological Literature Publishing House, 1998: 1-30.
[3] Young K D, Utkin V I, Ozguner U. A control engineer's guide to sliding mode control[J]. IEEE Transactions on Control Systems Technology, 1999, 7(3): 328-342.
[4] БхЅрзы. »¬ДЈ±дЅб№№їШЦЖMATLAB·ВХж[M]. ±±ѕ©: Зе»ЄґуС§іц°жЙз, 2005: 202-217.
LIU Jin-kun. Matlab simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2005: 202-217.
[5] ЅЄјМєЈ, є«УАёХ, НхµВєЈ, µИ. ¶юґОµчЅЪѕІТєЗэ¶ЇПµНіµДЦЗДЬPIDїШЦЖ[J]. №ю¶ы±х№¤Тµґуѧѧ±Ё, 1998, 30(1): 36-38.
JIANG Ji-hai, HAN Yong-gang, WANG De-hai, et al. The intelligent PID control in hydrostatic drive system with secondary regulation[J]. Journal of Harbin Institute of Technology, 1998, 30(1): 36-38.
[6] БхУо»Ф, ЖСєм, ЅЄјМєЈ. ¶юґОµчЅЪЧЄЛЩПµНіµДЛ«±Х»·їШЦЖСРѕї[J]. »ъґІУлТєС№, 2001(1): 39-40.
LIU Yu-hui, PU Hong, JIANG Ji-hai. Research on closed-loop control system of hydrostatic transmission with secondary regulation[J]. Machine Tool & Hydraulics, 2001(1): 39-40.
[7] ХЅРЛИє. ѕІТєЗэ¶Ї¶юґОµчЅЪјјКхїШЦЖМШРФµДСРѕї[D]. №ю¶ы±х: №ю¶ы±х№¤ТµґуС§»ъµз№¤іМС§Фє, 1999: 31-48.
ZHAN Xing-qun. Study of control characteristics of hydrostatic driving secondary regulation technology[D]. Harbin: Harbin Institute of Technology. School of Mechatronics Engineering, 1999: 31-48.
[8] Лп»Ф, ЅЄјМєЈ, Нхкї. ѕІТєґ«¶Ї»мєП¶ЇБ¦іµБѕµДQFTВі°фїШЦЖЖчЙијЖ[J]. јЄБЦґуѧѧ±Ё: №¤С§°ж, 2009, 39(6): 1538-1543.
SUN Hui, JIANG Ji-hai, WANG Xin. Quantitative feedback robust controller design for hydrostatic transmission hybrid vehicle[J]. Journal of Jilin University: Engineering and Technology Edition, 2009, 39(6): 1538-1543.
[9] УфГч, ґФЛ¬. »щУЪѕ¶Пт»щєЇКэЙсѕНшВ绬ģїШЦЖµДФЛ¶ЇїШЦЖПµНі[J]. ПµНі·ВХжС§±Ё, 2009, 21(3): 776-779.
YU Ming, CONG Shuang. Radial basis function neural network sliding mode control for motion control system[J]. Journal of System Simulation, 2009, 21(3): 776-779.
[10] Huang S J, Huang K S, Chiou K C. Development and application of a novel radio basis function sliding mode controller[J]. Mechatronics, 2003, 13: 313-329.
(±ај СоУЧЖЅ)
КХёеИХЖЪЈє2011-01-15Ј»РЮ»ШИХЖЪЈє2011-04-28
»щЅрПоДїЈє№ъјТЧФИ»їЖС§»щЅрЧКЦъПоДї(50875054)Ј»ХгЅґуС§БчМеґ«¶Їј°їШЦЖ№ъјТЦШµгКµСйКТїЄ·Е»щЅрЧКЦъПоДї(GZKF-2008003)
НЁРЕЧчХЯЈєХФБўѕь(1975-)Ј¬ДРЈ¬БЙДю±±ДюИЛЈ¬І©КїЈ¬ё±ЅМКЪЈ¬ґУКВіµБѕ№¤іМЎўБчМеґ«¶ЇУлїШЦЖСРѕїЈ»µз»°Јє13061168554Ј»E-mail: zhaolijun@hitwh.edu.cn

