机械手夹持接触力及力封闭分析
吴永宏,李群明
(中南大学 现代复杂装备设计与极端制造教育部重点实验室,湖南 长沙,410083)
摘 要:为合理确定机械手稳定夹持时的夹紧力,采用弹性线接触理论计算在工件上施加预紧力后机械手V型体与工件之间的接触压力,并分析手指处于不同工况位置时接触压力的变化,在此基础上计算不同工况位置时指端两V型体的夹紧力。以力螺旋理论为基础,建立手指与工件的接触模型,应用力封闭原理分析稳定夹持时接触压力与工件外力之间的关系,提出手指夹持工件时的稳定性判定方法,并针对实例计算接触力及夹紧力。研究结果表明:该方法可以用于准确计算V型体的夹紧力,并进行力封闭性判别,能够为机械手结构设计及其控制系统设计提供可靠的参数值。
关键词:V型手指;接触力;夹紧力;力螺旋;力封闭抓取
中图分类号:TP24 文献标志码:A 文章编号:1672-7207(2009)06-1580-07
Analysis of gripping contact force and force-closure of manipulator
WU Yong-hong, LI Qun-ming
(Key Laboratory of Design for Modern Complex Equipment and Extreme Manufacturing Ministry of Education, Central South University, Changsha 410083, China)
Abstract: In order to reasonably ascertain grasping force of manipulator while stably grasping, the contact force between V style finger tip and object due to the pre-tighten force was calculated based on the line contact theory, and the change of the contact force with the finger tip on the different positions was analyzed. The grasping force of the V style finger tip was calculated based on the contact force. The contact model of the finger tip and object was established based on the force spiral theory. The relation between external force and the contact force with stably grasping was analyzed by using force closure principle, and the method for calculating the stability of grasping was founded. The contact force and grasping force of one grasping instance were calculated. The results show that the grasping force and the stability of the V style finger tip can be accurately calculated, and the reliable value of the parameters can be supplied for the design of the manipulator and its control system.
Key words: V-style finger; contact force; grasping force; force spiral; force-closure grasp
机械手在工业中有广泛的应用[1-5]。机械手的一个重要功能就是抓取,即抓取目标物然后对其操作,能实现人手的相关操作功能。设计和衡量一个机械手性能的重要指标就是夹持的稳定性,要求机械手能输出足够大的夹紧力,并且在操作过程中持夹持力始终能够平衡目标物所受到的外力,以防止被夹持的目标物跌落[6-12]。机械手通过手指来抓取操作目标物。机械手的手指指端有多种形式,其中最常见的一种用于抓取圆柱形工件的手指为V型指结构,它是通过2个V型体来抓紧工件。由于V型体和工件表面的接触状况比较复杂,V型体施加于工件上的压力一般难以计算,因此,对于此种机械手夹紧力,一般都是在经验的基础上进行计算。本文作者以V型手指夹持圆柱形工件为例,通过分析V型体与工件间的接触力,确定V型手指机械手夹紧力以及影响因素,在此基础上应用力封闭原理,对V型手指夹持抓取的力封闭进行判断。
1 机械手接触力及夹紧力计算
1.1 机械手初始预紧时接触力
V型手指结构如图1所示。机械手在夹持工件前,先通过夹紧机构输出夹持力,作用在2个V型体上的夹紧力分别为P1和P2,由于结构的对称性,预紧作用力P1和P2是相等的,在V型体与工件之间形成预紧力,其示意图如图2所示。2个V型体作用面与工件间是在1条直线上接触,接触力可以用有限长线接触理论与数值计算方法来计算[15]。将接触区域沿长度方向(轴向)均匀划分为2b个矩形单元,其宽度与长度分别为2ai和2bi,在单元i内假定接触力沿轴向y均匀分布,poi为单元峰值压力,沿宽度方向x接触力分布为Hertz分布,如图3所示。
根据弹性变形方程及影响系数法,有:


图1 V型手指夹持圆柱形工件图
Fig.1 Sketch-map of V style finger grasp cylindrical object
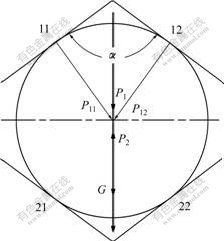
图2 V型手指与工件间施加预紧力
Fig.2 Pre-tighten force of V style finger and object
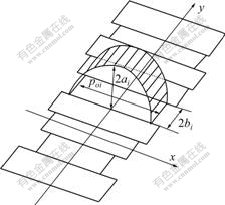
图3 线接触区域单元划分示意图
Fig.3 Sketch-map of element dividing of line-contact area
其中:k=1, 2, …, m;m为接触单元数;K为材料的弹性常数,K=1/4E;E为接触体的综合弹性模量;Cki为影响系数,指作用于单元i上的单位法向力引起单元k的几何变形量,是峰值压力poi的函数;fk为加载前接触体间的初始间隙;δ为载荷作用下弹性体的弹性趋近量,可以通过经验公式计算得到[15]:

作用于线接触区域的接触压力合力为:
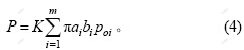
由于接触表面间不存在拉力,因此,式(4)中 poi≥0。
由图2可知,作用在V块上的力与V块2个工作面线接触区域的合力之间的关系为:

先按式(3)计算得到施加力P后接触区域弹性趋近量的近似值,然后,将其代入式(2),求解非线性方程组,通过迭代求出poi与δ的准确值,根据Hertz理论,利用式(1)就可以确定接触力沿x方向的分布。
1.2 机械手抓持工件时的接触力
在机械手将工件抓起过程中,机械手受到工件重力的作用,上、下V型体的接触力将发生变化,从而改变作用在2个V型体上的夹紧力。V型体的接触力状况与V型体的位置角度有关,如图4和图5所示。
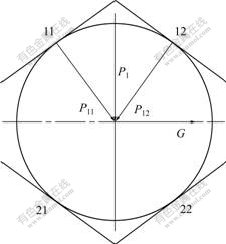
图4 V型体在水平位置时受力图
Fig.4 Sketch-map of force apply on V style finger tip on horizontal position
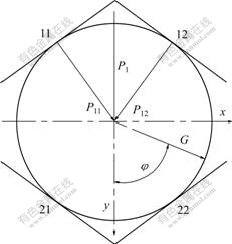
图5 V型体在任意位置时受力图
Fig.5 Sketch-map of force apply on V style finger tip on any position
由于工件受到的重力方向始终不变,因此,先分析2个V型体在水平位置和垂直位置的受力,V型体在任意方向的接触力可以通过将重力分解在水平与垂直方向上来计算。
1.2.1 V型体在垂直位置时的夹持接触力分析
如图2所示,当V型体在垂直位置时,通过对工件施加预紧力使V型体与工件之间产生接触力,设预紧力P在2个V型体区域11,12,21,22上产生的弹性趋近量分别为 ,
, ,
, 和
和 ,在工件重力作用下,相应的趋近量分别变为
,在工件重力作用下,相应的趋近量分别变为 ,
, ,
, 和
和 ,工件重力G产生的趋近量为
,工件重力G产生的趋近量为 ,则根据变形协调关系,有:
,则根据变形协调关系,有:

联立式(2),(3)和(6)~(10)可以求出接触区域的接触力及分布形式,然后,将其代入式(4)可求得上、下V型体的夹紧力。
1.2.2 V型体在水平位置时的夹持接触力
在水平位置时,V型体与工件重力方向如图4所示,根据变形协调关系,有:
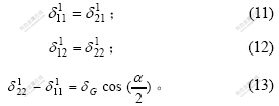
此时,结合(2),(11)~(13)可以求出水平位置时的接触力分布及大小,然后,将其代入式(4)便求得上、下V型体的夹紧力。在任意位置时,V型体的受力如图5所示,此时,重力方向与P1夹紧力的方向成夹角φ,因此,可以将重力分解在P1所在y轴方向和与P1垂直的x轴方向上,则有:
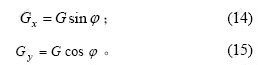
分别将(14)和(15)代入(13),(7)和(4),按照力的叠加原理,将得到的结果相加便可求的任意位置时的表面接触压力的分布、大小及夹紧力。
2 机械手夹持力封闭性分析
机械手在操作过程中要求其在任意一个位置角度处,作用于工件的合力要与工件所受外力平衡。由于指面与目标物在1条线上接触(如图6所示),因此,可以应用力螺旋理论来分析夹持的力封闭性[12-14]。
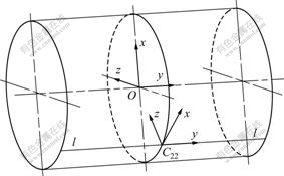
图6 物体坐标系与接触坐标系关系图
Fig.6 Relationship between object coordinate system and contact coordinate system
在图6中,将与工件固结的坐标系O-xyz定义为物体坐标系Co,将接触线中点处的坐标Ci-xyz定义为接触坐标系Ci,接触坐标系的z轴指向接触点表面内法线方向。线接触模型可以用力螺旋基与摩擦锥来表示[16]。力螺旋基是力螺旋相对于接触坐标系的方向基,其维数表示接触处所能独立施加的力向量的个数;摩擦锥是满足一定关系的接触力的集合,确定了在不滑动夹持时力螺旋各个量的大小关系。线接触力螺旋基(接触坐标在接触线的中点)与接触力向量分 别为:

可以通过式(21)分析一定预紧力作用下,机械手抓持一定质量的工件时的力封闭性,也可以分析机械手能承受的目标物所受的外力及其扰动的大小、范围,为机械手控制系统实现稳定夹持提供依据。
3 算例分析
各参数的选取如下:K=70.31 mm2/N,圆柱体工件半径R=10 mm,接触线长l=100 mm,接触区单元划分长度b=1 mm,接触体材料弹性模量E=207 GPa,V块夹角 =90?,接触表面摩擦因数为0.4。经过计算得到:当预紧力P1=P2=2 kN时,V块与圆柱面间的接触压力分布如图7所示。从图7可以看出:接触区压力沿接触线长度方向分布不均匀,在端面处压力有突变。在施加预紧力后,受到工件重力的影响,V块接触表面接触压力将发生改变,在
=90?,接触表面摩擦因数为0.4。经过计算得到:当预紧力P1=P2=2 kN时,V块与圆柱面间的接触压力分布如图7所示。从图7可以看出:接触区压力沿接触线长度方向分布不均匀,在端面处压力有突变。在施加预紧力后,受到工件重力的影响,V块接触表面接触压力将发生改变,在 =0? (图2所示垂直位置),且工件重力G分别为1.0,1.5和1.8 kN时计算得到的2个V型体的接触压力分布分别如图8和图9所示。可见,在垂直位置,V型体1的压力减小,V型体2的压力增大,而且随着重力的增大,2个V型体所受的力之差也增大。沿着接触线长度压力分布也
=0? (图2所示垂直位置),且工件重力G分别为1.0,1.5和1.8 kN时计算得到的2个V型体的接触压力分布分别如图8和图9所示。可见,在垂直位置,V型体1的压力减小,V型体2的压力增大,而且随着重力的增大,2个V型体所受的力之差也增大。沿着接触线长度压力分布也
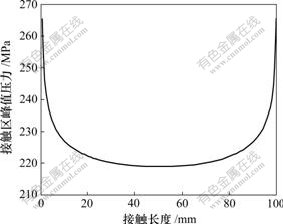
图7 预紧力作用下手指与工件间的接触压力
Fig.7 Contact force on object and finger tip after applying pre-tighten force on object
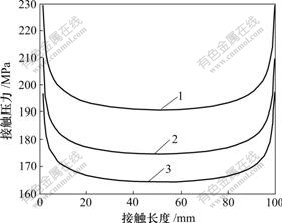
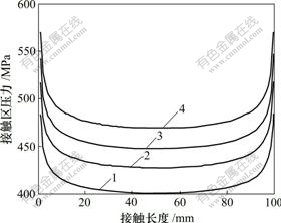
重力/kN: 1―1.0; 2―1.5; 3―1.8
图8 φ=0?时不同重力作用下V型体1上的接触压力
Fig.8 Contact force on V style finger tip 1 with different gravity as φ=0?
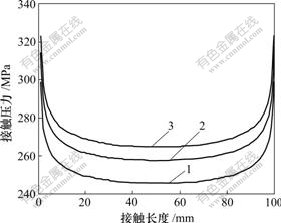
重力/kN: 1―1.0; 2―1.5; 3―1.8
图9 φ=0?时不同重力作用下V型体2上接触压力
Fig.9 Contact force on V style finger tip 2 with different gravity as φ=0?
不是均匀的。图10所示为在=30?且工件重力G=1.8 kN时得到的接触区压力分布。由于受力方向发生改变,因此,在同一个V型体的2个接触面上,压力分布不同,在V块2的接触区域22上受到的压力最大,而接触区域11的压力最小,随夹持质量的增加,最大力与最小力的差增大,V块接触面间力分布的不均匀性增大;当接触面间有摩擦时,这种压力的分布不同将引起摩擦力不同,从而影响夹持的稳定性。得到接触区域压力分布后,可以根据式(4)来确定接触区压力的合力与夹紧力。接触区域合力如表1所示。
1―11区域; 2―12区域; 3―21区域; 4―22区域
图10 φ=30?, G=1.8 kN时V型体接触压力
Fig.10 Contact force on V style finger tip 1 and tip 2 as φ=30?, G=1.8 kN
表1 接触区域合力
Table 1 Resultant force of contact area 合力/N

本例中,由于夹持件只受重力作用,没有力矩作用,分析其夹持的力封闭性是指接触压力的合力作用与夹持件的重力平衡,因此,式(16)可以简化为:
根据式(18)得到抓持矩阵为:

将上式和表1中的数据代入式(20),则可以验证是否力封闭。取=30?,G=1 kN的工况进行验算,此时,外力重力在坐标系Co下的分量为: =866.02 N,
=866.02 N, =500 N,Gy=0
=500 N,Gy=0
N,由式(20)计算得到:F0X=856 N,F0Z=512 N,F0Y=0 N,在误差允许的范围内,可以认为GX=FOX,GY=FOY,GZ=FOZ,即式(21)成立,因此,在此工况下,手指夹持稳定。用同样的方法可以对其他参数下力封闭夹持稳定性进行判断。
4 结 论
a. 不受力矩作用时,V型体与工件间的接触压力沿接触线方向分布不均匀,在端面处压力有突变。
b. V型体与工件间的接触压力的影响因素有V型体的张角、预紧力、手指所处的位置角度 、工件的材料特性等,V型体每个接触面上的压力在不同的位置角度下不相同,在水平位置时,2个V型体上的接触压力大小及分布状况相同,在垂直位置时,2个V型体上的接触压力之差最大,夹紧力也随之变化。
、工件的材料特性等,V型体每个接触面上的压力在不同的位置角度下不相同,在水平位置时,2个V型体上的接触压力大小及分布状况相同,在垂直位置时,2个V型体上的接触压力之差最大,夹紧力也随之变化。
c. 由V型体与工件间的接触压力可准确计算手指处于不同位姿时的夹紧力。
d. 夹紧力变化的实质是V型体与工件间的接触压力发生改变。应用力封闭原理,建立手指夹持工件时的稳定性判定方法,为机械手控制系统的设计提供了理论依据。
参考文献:
[1] LI Ji-ting, ZHANG Yu-ru, ZHANG Qi-xian. Calculation of contact forces in grashping by space decomposition[J]. Chinese Journal of Aeronautics, 2001, 14(2): 112-117.
[2] 李剑锋, 张玉茹, 王新华, 等. 多手指Power抓持的鲁棒性分析及载荷域计算[J]. 中国机械工程, 2004, 15(7): 628-631.
LI Jian-feng, ZHANG Yu-ru, WANG Xin-hua, et al. Robustness analysis and determination of stability load domain of multi-fingered hand power grasps[J]. China Mechanical Engineering, 2004, 15(7): 628-631.
[3] Al-Gallaf E A. Multi-fingered robot hand optimal task force distribution Neural inverse kinematics approach[J]. Robotics and Autonomous Systems, 2006, 54(1): 34-51.
[4] ZHENG Yu, QIAN Wen-han. Limiting and minimizing the contact forces in multifingered grasping[J]. Mechanism and Machine Theory, 2006, 41(10): 1243-1257.
[5] XIONG Cai-hua, LI You-fu, XIONG You-lun, et al. Grasp capability analysis of multifingered robot hands[J]. Robotics and Autonomous Systems, 1999, 27(4): 211-224.
[6] Nahavandi S, Jashim U M, Saadat M, et al. Heavy tools manipulation by low powered direct-drive five-bar parallel robot[J]. Mechanism and Machine Theory, 2007, 43(11): 1450-1461.
[7] Yashima M, Yamaguchi H. Control of whole finger manipulation utilizing frictionless sliding contact-theory and experiment[J]. Mechanism and Machine Theory, 1999, 34(8): 1255-1269.
[8] Lalibert T, Gosselin C M. Simulation and design of underactuated mechanical hands[J]. Mechanism and Machine Theory, 1998, 33(1/2): 39-57.
[9] Melchiorri C. Multiple whole-limb manipulation: An analysis in the force domain[J]. Robotics and Aulonomous Systems, 1997, 20(1): 15-38.
[10] ZUO Bing-ran, QIAN Wen-han. A force-closure test for soft multi-fingered grasps[J]. Science in China (Series E), 1998, 41(1): 62-69.
[11] Chevallier D P, Payandeh S. On computation of grasping forces in dynamic manipulation using a three-fingered grasp[J]. Mechanism and Machine Theory, 1998, 33(3): 225-244.
[12] 左炳然, 钱文瀚. 基于形封闭定量分析的最优抓取[J]. 上海交通大学学报, 1997, 31(12): 90-94.
ZUO Bing-ran, QIAN Wen-han. The optimal grasp based on quantitative analysis of form-closure[J]. Journal of Shanghai Jiao Tong University, 1997, 31(12): 90-94.
[13] 刘雯林, 熊蔡华. 夹具的封闭性和工件的可分离性分析[J]. 华中科技大学学报: 自然科学版, 2003, 31(8): 7-9.
LIU Wen-lin, XIONG Cai-hua. Closure of fixtures and detachability of workpiece[J]. Journal of Huazhong University: Science and Technology, 2003, 31(8): 7-9.
[14] 秦志强, 赵锡芳, 李泽湘. 机器人多指抓取的力封闭判别[J]. 上海交通大学学报, 1999, 33(7): 858-861.
QIN Zhi-qiang, ZHAO Xi-fang, LI Ze-xiang. On the force closure of robotic multifingered grasp[J]. Journal of Shanghai Jiao Tong University, 1999, 33(7): 858-861.
[15] 丁长安, 张 雷, 周福章, 等. 线接触弹性变形的解析算法[J]. 摩学学报, 2001, 21(2): 135-138.
DING Chang-an, ZHANG Lei, ZHOU Fu-zhang, et al. Theoretical formula for calculation of line-contact elastic contact deformation[J]. Tribology, 2001, 21(2): 135-138.
[16] 理查德・摩雷, 李泽湘, 夏恩卡・萨思特里. 机器人操作的数学导论[M]. 徐卫良, 钱瑞明, 译. 北京: 机械工业出版社, 1998.
Murray R M, LI Ze-xiang, Sastry S S. A mathematical to robotic manipulation[M]. XU Wei-liang, QIAN Rui-ming, tran. Beijing: China Machine Press, 1998.
[17] 万胜狄, 王运赣, 沈元彬. 锻造机械化与自动化[M]. 北京: 机械工业出版社, 1983.
WAN Sheng-di, WANG Yun-gan, SHEN Yuan-bin. Forge mechanization and automation[M]. Beijing: China Machine Press, 1983.
[18] 孟宪国, 冯长儒. 锻造操作机钳口夹紧力和夹紧缸能力的计算[J]. 一重技术, 2006(2): 1-3.
MENG Xian-guo, FENG Chang-ru. Jig jaw clamping force and cylinder clamping capacity calculation for forging manipulator[J]. CFHI Technology, 2006(2): 1-3.
[19] ZHU Xiao-cai, DONG Guo-hua, CAI Zi-xing, et al. Robust simultaneous tracking and abilization of wheeled mobile robots not satisfying nonholonomic constraint[J]. Journal of Central South University of Technology, 2007, 14(4): 537-545.
[20] Birglen L, Gosselin C M. Grasp-state plane analysis of two-phalanx underactuated fingers[J]. Mechanism and Machine Theory, 2006, 41(7): 807-822.
收稿日期:2009-01-25;修回日期:2009-04-09
基金项目:国家重点基础研究发展计划(“973”计划)项目(2006CB705400)
通信作者:李群明(1969-),男,湖南宁远人,博士,副教授,从事机电控制技术研究;电话:0731-88877915;E-mail: liqm@mail.csu.edu.cn

