���˷������Կ��ſ����о���չ
��Դ�ڿ������ϴ�ѧѧ��(��Ȼ��ѧ��)2021���4��
�������ߣ������ ����Ը
����ҳ�룺1197 - 1213
�ؼ��ʣ����˷��������Կ��ſ��ƣ������������Ż����ȶ��Է���
Key words��unmanned aerial vehicles; active disturbance rejection control; parameter tuning and optimization; stability analysis
ժ Ҫ���Կ��ſ�������(ADRC)��1989��������Ⱥ��ڶ����������õ��ɹ�Ӧ�á��ܷ�ɹ�Ӧ���ں��պ��������Ǽ����Կ��ſ������۴����ɹ����Ĺؼ����������Ƚ����Կ��ſ������ۣ�Ȼ�������Կ��ſ��������˷��������п�������Ӧ�ã���������Կ��ſ����������������Ż����ȶ��Է����Լ��Կ��ſ��ƸĽ��㷨�����ڷ��п���ϵͳ�е�Ӧ�ã��������ܽ�����о��ɹ���ָ��δ����չ�������ٵ����⣬��չ��ADRC���������ܻ�����Ʒ����չ��Ӧ��ǰ����
Abstract: The theory of active disturbance rejection control(ADRC) was proposed in 1989. It has been successfully applied in multiple engineering fields. Whether it can be successfully applied in the aerospace field is the key to verifying the success of the establishment of ADRC theory. Firstly, the theory of ADRC was introduced. Then the application of ADRC in the field of UAV flight control was reviewed, and the parameter tuning and optimization of ADRC, stability analysis, improved algorithm of ADRC and its application in flight control system were summarized. Finally, the relevant research results were summarized and the problems faced in the future development were pointed out. In the development of intellectualization and productization, ADRC technology is prospected.

DOI�� 10.11817/j.issn.1672-7207.2021.04.016
����Ը�������
(�Ͼ����պ����ѧ ֱ������������ѧ���Ҽ��ص�ʵ���ң����� �Ͼ���210016)
ժҪ���Կ��ſ�������(ADRC)��1989��������Ⱥ��ڶ����������õ��ɹ�Ӧ�á��ܷ�ɹ�Ӧ���ں��պ��������Ǽ����Կ��ſ������۴����ɹ����Ĺؼ����������Ƚ����Կ��ſ������ۣ�Ȼ�������Կ��ſ��������˷��������п�������Ӧ�ã���������Կ��ſ����������������Ż����ȶ��Է����Լ��Կ��ſ��ƸĽ��㷨�����ڷ��п���ϵͳ�е�Ӧ�ã��������ܽ�����о��ɹ���ָ��δ����չ�������ٵ����⣬��չ��ADRC���������ܻ�����Ʒ����չ��Ӧ��ǰ����
�ؼ��ʣ����˷��������Կ��ſ��ƣ������������Ż����ȶ��Է���
��ͼ����ţ�TP273 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2021��04-1197-16
SHEN��Suiyuan, XU��Jinfa
(National Key Laboratory of Rotorcraft Aeromechanics, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China)
Abstract: The theory of active disturbance rejection control(ADRC) was proposed in 1989. It has been successfully applied in multiple engineering fields. Whether it can be successfully applied in the aerospace field is the key to verifying the success of the establishment of ADRC theory. Firstly, the theory of ADRC was introduced. Then the application of ADRC in the field of UAV flight control was reviewed, and the parameter tuning and optimization of ADRC, stability analysis, improved algorithm of ADRC and its application in flight control system were summarized. Finally, the relevant research results were summarized and the problems faced in the future development were pointed out. In the development of intellectualization and productization, ADRC technology is prospected.
Key words: unmanned aerial vehicles; active disturbance rejection control; parameter tuning and optimization; stability analysis
���˷�����(unmanned aerial vehicles, UAV)��ָͨ�����п���ϵͳ�������Աң�ز��ݵIJ����˷�����[1]�����˷������ߴ�С����۵ͣ�������ǿ���Ҳ������������Ա����������ܵ������ձ��ע�����㷺Ӧ������顢�鱨�ռ�����ء�����Ŀ������ũҵֲ��������[2-6]�����п���ϵͳ�����˷������ġ����ԡ������п���������ǡ����ԡ��ĺ��ġ�Ŀǰ�������ѷ�չ���������㷨����PID���ơ���ģ���ơ�ģ�����ơ���������ƺ��Կ��ſ��Ƶ�[7-11]��
�Կ��ſ�������(active disturbance rejection control��ADRC)Դ��1989�꺫������ڿ����۵ķ�˼[12]������1998����ʽ���[13]��������ɸ�������[14-15](tracking differentiator��TD)������״̬�۲���[16](extended state observer��ESO)��״̬����������Ͽ�����[17](state error nonlinear control law, SENCL)3��������ɡ��Կ��ſ������ۼ��з�ӳ�˺�����ȶ��ڴ�ͳPID���Ƶķ�˼[18]���������Ի�[19]�������[20]�����⣬����������������ԣ�ȷ�����벻ȷ���ԵĽ��ޣ�ͻ����PID���Ƶġ�����������������ʵ���ˡ�����������������Կ��ſ����㷨³����ǿ�������ʵ�֣����ڱ����������������������ͺ��պ�����ڶ�����õ��ɹ�Ӧ�á�
���������Կ��ſ��Ƶõ����չ����Ӱ�������վ������õ���ѧ��Ĺ㷺��ע����ܵ�[21]�������Կ��ſ�����������о��ɹ����չ����ָ������Ҫ��һ����չ�������о������ݻ�������辶�ķ�����˼·����־ǿ[22]���Կ��ſ��Ƶķ�ʽ����������ͻ���ԭ�������������ͷ�˼��̽�����Կ��ſ���˼����ں������壬��һ����չ���Կ��ſ��Ƽ��������ۣ�����ǿ��[23-24]ϵͳ�ز������Կ��ſ������۵��о���չ�������ڹ����е�Ӧ�ý������ܽ���ࣻ��������[25]������Ӧ���Կ��ſ���˼����ʱ��ϵͳ����ij�����Ʒ��������ܽ����Կ��ſ������IJ�������������
�Կ��ſ��ƹ���Ӧ�ñȽ϶࣬�ڷ��������п���ϵͳ��Ӧ��Ҳ���٣���δ��ϵͳ���������ס���������ϵͳ�����Կ��ſ��������˷��������п��������Ӧ�ã�����δ����չ�������չ����Ϊ���˷��������п��������о��ṩ�ο���
1 �Կ��ſ��������ԭ��
����PID���ƴ��ڹ���ȱ��[26]��
1) ����Ŀ��v�ڿ��ƹ����п��ԡ����䡱���������y����Բ������䣬�û��������y��������Ŀ����v����������
2) ���e�����ײ������������e�Ļ����ײ�����������������ͣ�ʹϵͳ��óٶۡ����������֡���������ϲ�������õ���Ϸ�ʽ��
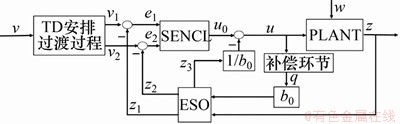
ADRC���������˾���PID���Ƶ�ȱ�ݣ���ṹ��ͼ1��ʾ���ɸ�������������״̬�۲�����״̬����������Ͽ�������ɣ���Щ��ɲ��ֿɸ��ݿ���������������ϣ����ɲ�ͬ�Ŀ�����ϡ�TD���ٻ�ȡ��������źź����źţ� ESO��������ϵͳ״̬���Ŷ����Ŷ���ϵͳ��ȷ����ģ���ɵ����ź�ϵͳ�ⲿ�Ŷ���SENCLΪ״̬����������Ͽ����ɣ������Ŷ���������ʵ���Զ����ơ��Կ��ſ��ƿ˷���ϵͳ��̬ģ�����ƣ�����Ч�������������źŵ�Ӱ�죬�ܹ������ⲿ�Ŷ�����ʵʱ�������������õĿ������ܡ�
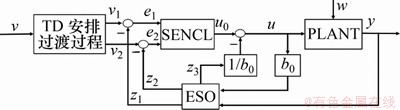
ͼ1��ADRC�ṹ
Fig. 1��ADRC structure
1.1����������
���������������ź�v(t)���Ϊ�����ź�v1(t)�����ź�v2(t)���������ź��е��������ܺõ��������á�
����[15]�����������ź��н�Ķ�����������ɢģ��Ϊ

����


��ֻ����


ʽ�У�kΪ�źŲ����ĵ�kʱ�̣�hΪ��ɢ����ʱ�䲽����rΪ�ٶ����ӡ�h��r�����ɵ�������������źŸ����ٶȡ����״̬����

1.2������״̬�۲���
����������Ŷ��ķ����Բ�ȷ������Ϊ

���У�u��yΪϵͳ��������źţ�




ϵͳ(8)����n��״̬������ʾΪn���ַ��̣���


���ϵͳ(8)������ϵͳ(9)Ϊ��������״̬�۲�����
����





������״̬�����Ĺ���ֵ
��ϵͳ(9)�����ź����Ϊ
������״̬����ֵ������ϵͳ��Ϊn�����ִ��������Ա��ض���

Ҳ���Ƿ����Ա��ض���Ķ�̬�������Ի�������
1.3��״̬��������������Ͽ�����
��֪����ϵͳ���ض��������Ŀ���������ø����������ٻ�ȡ����Ŀ������źź����źţ���������״̬�۲��������״̬������ǰ����ֵ���ֹ���ֵ������״̬����������״̬���������з�������ϣ��γɵĿ������ܺܺÿ����ܿض�����ٸ�������Ŀ��������ϵͳ��³���Ժã�����Ч�����Ŷ����š����÷�����������£�
ʽ�У�
2 ���˷������Կ��ſ���Ӧ��
�����Կ��ſ��Ƽ����IJ��Ϸ�չ�������÷�Χ���������ں��������Կ��ſ������ڲ�ͬ���͵����˷��������п���ϵͳ��Ӧ�á�
2.1���Կ��ſ��ƿ����õ�ϵͳ
GUO��[27-28]�������Կ��ſ�����������SISOϵͳ��MIMOϵͳ��������֤����������[13]������ʱ��ϵͳ�������ϵͳ����С��λϵͳ�Ȳ�ͬ����ʹ���Կ��ſ������ķ�����XUE��[29]�����һ���ⲿ�Ŷ��������ķ�����ʱ�䲻ȷ��ϵͳ�������Կ��ſ���ϵͳ������������Lipchitz��������ʱ�Կ��ſ���������һ�����ƣ�����[30-32]����˷���С��λϵͳ�������Կ��ſ��ƣ�����[33]������ADRC�����ϵͳ��Ӧ�����������[34-35]��ADRC-GPC�㷨Ӧ���ڻ���ϵͳ��ͬ������ƣ�֤����������ǿ������ϵͳ������[36]֤����ADRC-GPC�㷨�����ڴ�ʱ�Ͷ�������ϵͳ��
�Կ��ſ�����Ӧ��ǿ�����ڶิ��ϵͳ�����еõ��ɹ�Ӧ�á���������������״̬�۲�����״̬��������������Ͽ����������ϣ������������ۺϺ��һ�������Կ��ſ��Ƶ�Ӧ�÷�Χ��������[12]��������Ų��õĽ������ƹ�����PID���Ƽ�����ͳ�ε�λ�����Կ��ſ��Ƽ�������������ƹ��̽�ӭ���Կ��ſ���������ʱ����
���˷������ܴ����ڲ���ȷ����(δ��ģ��̬��������ȷ����)�Լ��ⲿ��ȷ����(�ⲿ������δ֪�Ŷ�)���⽫������ѧģ����ʵ�ʷ��д��ڽϴ�����ͳ���Ʒ���������Ч���ơ�ADRC��ϵͳ�ڲ����ⲿ�Ŷ���Ϊ���Ŷ���ͨ������״̬�۲��������Ŷ����й��Ʋ�ʵʱ������ADRC�������ھ�ȷ����ѧģ�ͣ��˷��������Ŷ��IJ�ȷ���ԣ����н�ǿ��³���ԣ������ڲ�ͬ�������˷��������п���ϵͳ��ơ�
2.2��������������
���������������з����ԡ�ǿ��ϡ�Ƿ������ʱ�����ԣ�����صĽṹ���ֺͷ��п�������ʹ�����ϵͳ������ѶȽϴ�[37]������������������Ϊ�����Ķ�����������������п���ϵͳ����ܷ�ӳ�����Ƽ�����Ӧ�����������[38]Ϊ�����������������һ�������Կ�����̬��������������/�����Կ���λ�ÿ���������ʵ����֤��ϵͳ����С����Ӧ�죬������Ӧ��Χ�㡢³���Ա�ǿ������[39]Ϊ�������������������̬�Ƕ��LADRC����������̬���ٶ��ڻ�������ADRC���������߶Ȼ�λ��PID���������ٶ�PID�������ͼ��ٶ�ADRC�������������������˴���ADRC��������������Ч���ã�����[40]�Ա��о���LADRC�뷴������Ӧ���Ŀ���Ч����������LADRC�ڿ����ԡ�³���Լ���̬�����ϵ���Խ�ԣ�����[41]�����Կ��ſ������λ�ÿ��������ڻ�PID���������Ϸ�����������������������Ϲ����еĿ������⣻����[42]Ϊһ������ʸ������ת���������˻������ADRC�Թ��Ʋ����������Ŷ�������˶���ʧЧ��³���ԡ�
����[43]�����ADRC��̬�ڻ���������PIDλ�����������������������������Ŀ����ԣ�������֤�˷����Ŀɿ��ԡ�����[44]�о���³��������ADRC�������������������е�Ӧ�ã�³���������ڰ����������½��о����źŵ���ȡ���˲���ʵ�����ڸ�Ƶ�������Ŷ��µ��ȶ��켣���١�
���������˷���������һ�����ṹ��ʽ�Ķ�����������������[45]Ӧ��LADRCʵ�ְ��������˻�ƫ����̬���ٿ��ƣ����뾲̬�����Ͳ���������֤��ƫ����̬����ִ��������ʱ����Ȼ���нϺõ�ƫ���������ܡ����������˷�����Ҳ��һ�ೣ�����͵Ķ�����������������[46]�����һ���Ӿ������Ĵ����Կ���λ�˿���������ż�����������˷������⣬�������������˷����������ܾ��нṹ���ȶ��Ժá���Լ���ϵ����ƣ�����ṹ���Գƣ������Ʋ�����ƴ����Ѷȡ�����[47]����������������ѧ��ģ�������һ��ADRCλ�˿����������봫ͳPID��������ȣ�ADRC��Ӧ�ٶȸ��죬������������ǿ��
2.3������ֱ����
�������������һ��������ֱ�����Ķ���ѧģ��ͬ�����и߶ȷ����Ժ�ǿ����ԣ��������������ݻ������Ӽ��������ŵ����صĴ��ڣ����¾�ȷ��ģ�Ѷȴ��Կ��ſ��Ƽ����Ա��ض���ģ����Ҫ�ߣ�Ϊ����ֱ������Ʒ��п���ϵͳ�ṩ��һ����Ч;����
����[48]���������ֱ��������ͨ���Կ��ſ�����������˻���ģ��������ģ����Ϣ������ʽ��������Կ��ſ������ܡ�ģ����Ϣ������ʽ��ESO��ʽ�Ͷ�̬���������˸��죬���������ADRC��δ֪�Ŷ��IJ����������Կ��Ų������ֲ��䡣
����[49]�����Կ��ſ��Ƽ����������ֱ������λ�ÿ����ɣ�������·��������ƣ�ǰ��ͨ��ESO�Ŷ�����ʵ�ֶ�̬���������������ֱ�����Ŀ��������Ϳ��ƾ��ȣ�����[50]�ۺϷ�����ֱ��������ȷ�����ԣ������һ���Կ��ſ��Ʋ��ԣ���֤������ж��Ŷ���������ǿ�����ƾ��ȸߵ��ŵ㣬�����������Աȴ�ͳ��PID���Ʒ����ţ�����[51]���������ֱ������ADRC˫�����������ڻ�Ϊ��̬��������߶Ȼ�����Ժ�����λ�ƽ��п��ƣ������ڻ�����ĺ�������Dzο����룬��������������ģ̬������֤���Ʒ�������Ч�Ժ�³���ԡ�
���ڷ��л����Ķ�䣬����ģ�ͼ��Լ�ģ�͵ľ�ȷ�ȵ����ظ��ţ���Ҫ����ֱ�����켣����ϵͳ����п�������������[52]Ϊ�˽������ֱ�����켣����Ч��������ֱ�������������IJ����ͱ�ʶ�����Լ��ⲿ�Ŷ����⣬�����һ�ֻ���LADRC������·����ֱ�����켣����ϵͳ�����ݱ������Ķ���ѧ���̽״�ѡȡ��Ӧ��һ�����LADRC�������������ʱ��߶�ԭ���������������ι�������ֱ��������̬���ٶȺ�λ�ÿ��ƻ�·��������·��������������ֱ�����켣����ϵͳ��ͨ��ʩ�Ӹ����Ŷ���ֱ֤�����켣����������ͼ2��ʾΪ��ͬ�����µĿռ�켣��Ӧ����ͼ2���Կ��������Ʒ����ܺܺõؿ˷������Ŷ���Ӱ�죬ʵ�ִ������ʵġ�8�����ι켣���١�
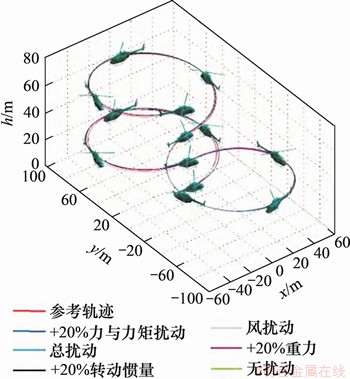
ͼ2����ͬ�����µĿռ�켣��Ӧ[52]
Fig. 2��Spatial path response under various operating conditions[52]
����[53-54]��������600����ֱ��������ѧģ�ͣ����һ�ָĽ��Ķ���LADRC����TD���ӵ�LESO�У�������Ӱ���������ĸ��ţ��ڸĽ��������ṹ�뷴������ϵ�������ϣ��Ա��о��˸ÿ��Ʒ�����ģ��PID�Ŀ���Ч�������ָ÷�������̬����Ӧ�ٶȸ��죬�ȶ��Ը��á�
������ת���������ڲ��������ࡢͨ��������ص����⣬����[55]������������ת���������ɹ����з��������������Ժ�ͨ���л����ԣ�����������п��Ƶ��ص�����˽���ADRC������������TD�����̬�����ʣ�������ESO�Ľ�����ͨ��������ת��������ȫ���߷��п��Ʒ��棬��֤�˿���ϵͳ����Ч�ԡ����������Ժ�ͨ���л����Եĺ����ԡ�
����ʽ˫����ֱ�����봫ͳ��������β��ֱ������Ⱦ�����ͣ���ù��ʵ͡���������ǿ�����ı仯��Χ����ʺϽ��ص��ŵ㣬����[56-57]Ϊ�������ʽ˫����ֱ������̬�����еĶ������Ƿ������ǿ��ϵĿ������⣬����˴����Կ��ſ����������Զ����͵�����(linear quadratic regulator, LQR)�����ִ����Կ��ſ��������и����Ŀ��ƾ��ȣ��ܸ�����������Ե�Ҫ���Ҹ���³���ԡ����������Լ��Է�����ǿ���ϵͳ�Ľ���������
2.4���̶������˷�����
�̶������˷��������Զ���ʻ��ϵͳ���Կ��ſ��Ƽ�������һӦ����������[58]Ϊһ�̶������˷����������ADRC����ϵͳ������[59]Ϊ��˹��182p���Ⱥ�ģ�����ADRC������ת��̬����ϵͳ�������������֤�������Ч��������[60]Ϊ�̶������˻������ADRC�����������ϵͳ������[61]�Աȷ�����ADRC��PID�Ŀ�����������
�����������˻�����ģ��ǿ�����ԡ���ȷ���Լ������ǿ��ϵ����⣬����[62]����˻��ڿ�ط��ݿ��Ƽ�������̬�����ɣ�������ESO����ģ���ܲ�ȷ���ԣ����ú�����Ϸ���������������ƫָ������ö������ڶԹ۲������п�ʱ�ʹ���������[63]����ADRC�۲Ⲣ�����³��������Է����������˻����п��ƣ�ʹ�ú�����Ƕ�ָ����ӦѸ�١�
����[64]Ϊ���Է������˻������ADRC³������ϵͳ���ܹ��˷����ż�����ģ̬������Χ�㶯��Ӱ�죻����[65]Ϊ�߿ճ���ʱ���˻����������ͺ����Կ��ź��������ɡ�
�̶������˷������������˹��ϻ���������������Χ�仯������[66]����LADRC���������˹�������ı��ض������Ա仯�����������н��㶯����ʵʱ���ƺͲ����������ض��������ɲ������Ա仯Ӱ��ı�ƶ���ʵ�ֶԶ������˹��ϵı����ݴ����ơ�
2.5���������ͷ�����
�����˻����������Ը߶ȷ����Բ�����ѧģ�Ͳ��״������[67]����ADRC�������ھ�ȷ����ѧģ���ص㣬����������˻��ĸ߶ȡ���̬����ϵͳ���õ��˽ϺõĿ���Ч�������˻�������Ʒ�������У����˻����������仯�ҳ��ָ߶ȷ����ԣ�ϵͳģ�ʹ��ڲ�ȷ���ԣ�����[68]��������˻�������Ʒ���ϵͳ�Ŀ��������õ��˽�Ϊ��ȷ�Ŀ���Ч��������[69]�ڸ߳��������˻����Ա��о���ADRC��PID���Ƽ�
��֮���Կ��ſ�����Ӧ�ڴ�������˷��������п���ϵͳ������������Կ��ſ��Ƶ������Լ�����Ӧ�õ����ơ�����ʵ��Ӧ�ý�������Կ��ſ������PID���ƾ����������ƣ�������������Ʒ�����ȣ���һЩ�ؼ���������ָ����Ҳչ�ֳ����ơ��������о����ǵķ���״̬����ȫ�棬��Ҫ��֤�����Կ��ſ����ܷ���Ӧ���˷�����ȫ���߷����Լ����й����еĸ�Ƶ�Ŷ����������С���ˣ��ھ���Ӧ��ʱ����Ҫ��ϱ��ض���Ĺ���ԭ�������������ص㣬����Կ��ſ�������
3 �Կ��ſ����㷨�Ľ����ȶ��Է���
�Կ��ſ����㷨�Ľ���Ҫ�漰ADRC�����㷨�Ľ����ں��㷨�Ľ�����ADRC�����㷨�Ľ�����ADRC��ܽṹ�Ľ���fal�����Ľ�2�����档
3.1��ADRC�����㷨�Ľ�
�Կ��ſ���ϵͳ����Ҫ�ع̶�������Ϸ�ʽ���仯���Ӿ������Ҫ�������ϡ�fal����Ҳ����һ�ɲ��䣬������Ҫ���б䶯��
����[71]ָ������������������ִ�л����Ķ�̬���֣���ɽ�������Ϊ����ϵͳ����ʵ��ִ�л����Ի������ͺ����ã������ϲ����ԣ�Ϊ���⽫ESO����Ϊ3���������߽ף��Կ��������С��ӳٲ�����ת��Ϊ������q������������Ϊ�м���������Ի����˶�ģ����ESO�������ܹ�ȷ�۲��Ŷ���ͬʱ������ESO�������ߴ����IJ��������������⣬�Ľ���Ŀ���������ͼ3��ʾ��ͼ4��ʾΪ�������в���2��ESO�Ĺ۲�Ч���Աȡ���ͼ4��֪����ʱ��Ϊ0.25~1.25 s�ڼ䣬����0.1 N��m�ĺ�������Ŷ������Կ��������ӳٲ�����ESO���и��ŵĹ۲�������
ͼ3��ADRC�Ľ��ṹ[71]
Fig. 3��Improved structure of ADRC[71]
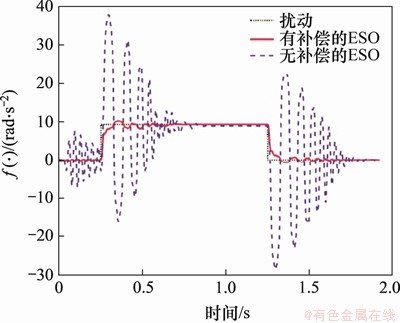
ͼ4���в���������ESO���ŶԱ�[71]
Fig. 4��Comparison of ESO between with and without compensations for disturbance estimation[71]
����[72]�����������������ADRC����ϵͳʱ��ָ��������[73]��Ƶ�fal������ԭ�㸽�����ڹյ㣬�ᵼ��б�ʽϴ�����۲����۲�Ч�����ѣ���ˣ����������fal����
��fal������Ҫ�Ľ������������Ժ��������к�����ϵĺ�����ʽ���fal������ָ����ʽ�������˹յ�ͽϴ��������棬ͬʱ�����˳����ˣ�ͨ�����ڦ˿��Ա���fal������С�����档ͼ5��ʾΪfal����fal��Ӧ���ߡ�ͼ6��ʾΪfal/e����fal/e��Ӧ���ߡ���ͼ5��ͼ6�ķ���Ա�ʵ�������fal�������ԭfal������ԭ����и��õ�ƽ���ԡ������Ժ������ԣ��������ԭ�㸽���յ㵼�¹۲����۲�Ч�����ѵ����⡣
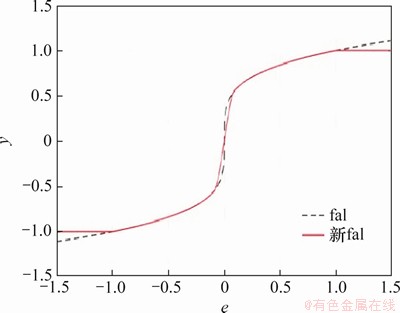
ͼ5��fal����fal��Ӧ����[72]
Fig. 5��Response curves of fal and new fal[72]
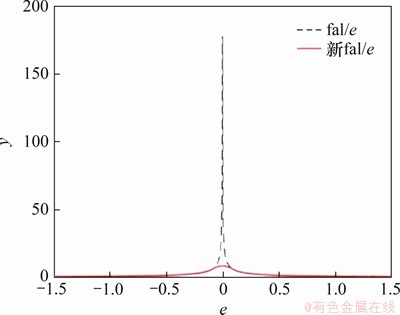
ͼ6��fal/e����fal/e��Ӧ����[72]
Fig. 6��Response curves of fal/e and new fal/e[72]
����[74]�����ESO��ɢ�Ľ�����������shifted Tustin˫���Ա任������ɢ��ESO�������̣���������ɢ�������п������������

ʽ�У�

ͬʱ���������λ��Ľ���fal��������

�������Ž�ǿ��ʱ������ر������Ѹ�����Ľ��˶���fal�����ġ������С���桱���Ʋ��ԣ�������ɡ���ͣ��ǿ����п��ƽ����˷��棬��֤�˸Ľ���������Ч�ԡ�
�ɴ˿ɼ������ӻ����ADRC����ϵͳ��ģ���ܹ���ijЩ�����ϻ�����棬�����Ⲣ����ζ���������������⣬ͬʱģ��仯��������ƾ��ȡ�������������ɲ�ȷ�����ء��㷨�Ľ��ܸ��ƿ����ٶȣ��������˿���������������Ҫ��ע�����⡣���ܸĽ�fal�����ܸ��ƿ���Ч��������֮����������Ҳ�ܶ࣬���������������Ƿ�Ա��ض�����������Եȣ�Ҳ��δ����Ҫ��ע�����⡣
3.2���ں��㷨�Ľ�
��չ�������˲������Կ��ſ����ںϣ���ǿ��������λ�˿��ƵĿ���������[75]�������Կ����������
����[78]�����Կ����뷴�������ں�����˻����������������̬���ƣ�����[79]�������������������̬���Ƶķ�����PD���������Կ����е���������״̬�۲������ϵĿ��Ʋ��ԣ���������˻���̬����ϵͳ�����ܡ�
����[80-81]����ģ���Կ��ſ�������Ϊ��������������ʱ�ӿ��Ƽ��������ʱ��ģ�������Կ����ݴ����п��Ʒ�������Ա����ݴ����Ʒ���������δ֪�����б�֤ϵͳ���ȶ����Ҳ����г�ʼ�ָ��Ե����⣬����ESO������Ӧ�����ںϣ����һ������������������������Ӧ�����������ڵķ������Թ��Ͻ��м�⡢����͵��ڡ�
����[82]�о��ĸ߳��������˻�����ϵͳ����������˴����Կ��ſ��ƣ������ƻ�ģ���ƶ���ȡ���˽Ϻõ�Ч��������[83-84]��������������Ϊ���ض�������˻�ģ�Կ��ſ�����������[85]����߽�ģ�۲������ۣ���Ч�����˴�ͳESO����״̬�۲��������ȶ��������ٶȲ��ܱ�֤��ȱ�㣻����[86]���÷����Թ⻬������ƻ�ģ�����ɣ���Ч��С�����źŵĶ���LESO�������Ŷ�״̬�����뻬ģ�������ںϣ�ʵ���˾�����ȫ�Կ�����������Ƶ����������˻����ܱ�ӷ��п��ƣ�����[87]���÷������ն˻�ģ�Կ��ſ��Ʋ��ԣ�����˿����ն˻�ģ�棬��ӦЧ�����ã�����˷����컬ģ����Զ��ƽ��������ٶ��������⣬ʵ��ȫ�ֿ��������������ϵͳ�����ԡ�
ADRC�����ö��ֿ��ƿ�ܣ���֮�ں����ֳ���ǿ�������Ժͻ����ԡ�ADRC����Ч����λ���Ŷ��������˿�����ƶԾ�ȷ��ѧģ�͵�������Ϊ����ϵͳ����ṩһ�ֺܺõIJ�ȱ���������ںϹ����б����˵��������������Ŀ������⣬ֻ���ĸ���ģ��ṹ������ɼ��ɡ�
3.3���ȶ��Է���
�Կ��ſ��ƶԱ��ض���ȷ���Բ��ֵ���ѧ��ģû�о�����ʽ���ƣ������۷������������ѣ���ʹ�����Ի���Ӧ�ø��Ӹ���[21]���ȶ��Է����ǿ���ϵͳ��Ʋ���ȱ�ٵ�һ�����ڡ�
����[44]����Hurwitz�����жϷ�������������/�������Կ��ſ��������������������й����п����л������µĽ����ȶ��ԣ�����[88]����Routh�оݷ���ϵͳ�ȶ��ԣ�����ͨ���ıջ����ݺ�������Ƶ�����ۻ�ã����ں��Ը��Ź�������ȱ�ݣ�����[89]����I/O�ȶ��Զ�������ģ���������������ȶ��ij����������������������ģ�Կ��ſ���ϵͳ�ȶ���[83-84]�̶������˷������Կ��ſ���ϵͳ�ȶ���[90]����Lyapunov�ȶ������۵õ�����֤����
4 �����������Ż�
ADRC���Ʋ����������Կ��ſ����е���Ҫ���ڡ�ADRC�����Ż������ܶ࣬�ڴ������Ż��㷨Ӧ�ã����Զ�Ѱ���㷨ʵ��ADRC������������
4.1����������
�Կ��ſ���������Ч��������Ʋ���ѡȡ��ϵ�ش��Կ��ſ����������࣬�߽��Կ��ſ���������ࡣ��Щ�ؼ�����֮������Դ������ڷ����ĸ�Чȷʮ����Ҫ��
����[91]����˲��ù����ݶ��㷨(conjugate gradient algorithm��CGA)����ADRC�����ķ������������������������������н�������֤������[92]����˻���PID������������LADRC������������������[93]���ø��켣���Բ�����������������[94]���ݹ��̾��飬��TD��ESO��SENCL��3�����ְ���һ������ֿ����в�������������ٽ�����ϲ���������
�ܵ���˵�������˷��������п���ϵͳ�еIJ����������������࣬��Ҫ�����Թ��̾������PID������������Ϊ����δ�������Խ�����������ADRC�����������飬�����˷��������������ԡ�
4.2�������Ż�
�����Ż��㷨���Ŵ��㷨���˹���Ⱥ�㷨���������㷨����Ӧ����ʵ�ʹ����Ż����㷨�������죬��ADRC���Ͽɽ������������Ż�����һ�ּ���ֵ�ķ���������Ч�����š�
����[95]Ϊ���������������Ŵ��㷨(genetic algorithm��GA)������ϵͳESO��




����[99]���������ֱ��������LADRC��������������˹���Ⱥ�㷨(artificial bee colony algorithm, ABC)��PSO��GA��3�ֲ����Ż������Բ��������Ż�����������ABC�����ٶȽϿ죬�ȶ�ʱ�������2���㷨�Ŀ죬Ȼ��Ӧ�ٶ��Ա�PSO�㷨������
����[100]����һ�ֻ��ڱ�Ȩ�ر����Ⱥ�Ż�(variable weighted mutant pigeon inspired optimization, VWMPIO)�㷨���Կ��ſ������Ŀ��Ʋ��������Ż����Խ�����м������ͻ��Ľ�ģ����ǿ�����Լ�ADRC�����������⣻����[101]�û����Ż��Զ��������������˷�ͧ��LADRC����ϵͳ���������Ż���
����[102]������Ⱥ�㷨(particle swarm optimization,PSO)�Ż����������˷������Ŀ��Ʋ�����������ʵ����֤������[103]��˫�ռ�(��
�����Կ��ſ���Ӧ������IJ�����չ�����Ƕ��Կ��ſ����������������Ż�����Ҫ����ߣ������õķ���Ҫ�����ã������ýϺõĹ���Ч������Ҫ�������빤���н���Ȩ�⡢���ؿ��ǡ�
5 �ܽ�
������[12]��1989������Կ��ſ������ۣ���չ��������30���꣬�����ڶ����ҵ����õ�Ӧ�á������������Կ��ſ��Ƽ��������˷��������п��Ƶ�Ӧ��������������Կ��ſ��ƻ���ԭ�����Կ��ſ����ڲ�ͬ�������˷�������Ӧ����״���Կ��ſ��ƵIJ����������Ż����ȶ��Է����Լ��㷨�Ľ��ȡ����Կ������������Կ��ſ��Ʒ�չ�ܿ죬Ҳ��������۷������������ý϶࣬�����˷��������п��Ʒ���Ҳ��Ϊ������չ���ơ�
ͼ7��ʾΪ�����˷��������п��Ʒ����ܹ���ADRC�ںϵĿ����㷨����ͼ7�ɼ�����ͳ���˷��������Ʒ����ֶ�����ADRC�㷨�ںϣ�˵��ADRC�к�ǿ����չ�ԡ�����������ADRC�����ʱ������ͨ��Ѱ�Һ����㷨�����ںϸĽ����Ʒ�����
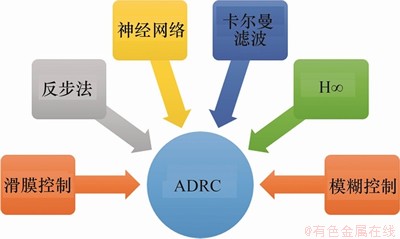
ͼ7���ܹ���ADRC�ںϵĿ����㷨
Fig.7��Control algorithms integrated with ADRC
ͼ8��ʾΪADRC�ڶ��ֹ������˷��������п��Ƶ�Ӧ�á��Կ��ſ��Ƽ���������ʢ��������������ͻ�ƴ�ͳ���˷��������п��Ʒ�������Ҫԭ�����ڣ�
1) �Կ��ſ��Ʋ���Ҫ������ȷ����ѧģ�ͣ������и��Ź�����������ǡ��Ӧ�����˷������߶ȷ��������ڽ�ģ�����й��������Ų�ȷ�����ص㡣

ͼ8��ADRC�����˷��������п��Ƶ�Ӧ��
Fig.8��ADRC application in flight control of UAV
2) �Կ��ſ����ں���ǿ��������ֿ��Ʒ�����ϣ��ٽ����Կ��ſ��Ƶķ�չ���Կ��ſ��Ʋ����Ż����������ڿ�������������
3) �Կ��ſ��ƵĿ��ƽṹ�Ϳ�����ģ��Դ���ִ��������ۣ��ܽ��ʵ�ʹ������⡣
������ˣ��Կ��ſ�����Ȼ�����Ͼ���ս��
1) �Կ��ſ��ƻ������װ��Ѷ�ģ�͵�����������Ҫ֪������״Ρ����÷�Χ�������������Ϣ�����ڸ��ӵı��ض���������Щ��Ϣ�����Ѷȡ�
2) �Կ��ſ��Ʋ����������ӣ���Ҫ�����IJ����϶࣬�������Կ��ſ��ƵIJ��������ȷ������Կ��ſ��ƵIJ��������٣������ڿ��ƾ��ȼ������������Բ����������Կ��ſ��ơ�
3) �Կ��ſ��Ʋ����Ż��㷨�ڹ���ʵ���ϻ���һ���Ѷȣ��ܲ�������������������ƣ���������ֵ��ʵ�ʹ�������ֵ����һ����ࡣ
4) �Կ��ſ���Ӧ���ڷ����Ժ�ʱ�����Ա��ض���Ҫʵʱ���߹���Ԥ������b0�������ס�Ӧ����ʱ��ϵͳ��ʱ�ͳ̶ȹ��������Ч�������ޡ�
6 չ��
�Կ��ſ��������˷��������п��Ƶ�Ӧ�ý��������˷���������Ҫ����ߵõ����ٷ�չ���Կ��ſ���Ҳ���������˷������ķ�չ�����µ�ʹ�����Կ��ſ��ƻ�õ���һ�����ƣ���Ҫ�����У�
1) ��������������Ʒ������Ż��㷨������Կ��ſ��Ʋ����������������˷����������ĸ����ԣ���һ������Կ��ſ��Ƶ�����Ӧ������
2) ���˷������������ܻ���������������˷�����Ҳ���ڿ��ܡ��Կ��ſ��Ƽ����������˻�����������ܻ�ESO���ٹ���״̬ʹ����ϵͳ���װ��ѶԱ��ض����������
3) ǿ���Կ��ſ����㷨�����������㷨�ںϣ��Ľ��ں��㷨��Ӧ�ø����������������п���оƬ��ʹ�Կ��ſ��Ʋ�Ʒ��������Ӧ�ִ����������ٷ�չ����Ҫ��
�ο����ף�
[1] CAI Guowei, CHEN B M, LEE T H. Unmanned rotorcraft systems[M]. London: Springer, 2011: 21-29.
[2] CAMPOY P, GARCIA P J, BARRIENTOS A. An stereoscopic vision systems guiding an autonomous helicopter for overhead power cable inspection[J]. Lecture Notes in Comouter Science, 2011, 95(3): 115-124.
[3] WANG Binhai, HAN Lei, ZHANG Hailong, et al. A flying robotic system for power line corridor inspection[C]// 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO). Guilin, China: IEEE, 2009: 2468-2473.
[4] EISENBEISS H. The autonomous mini helicopter: a powerful platform for mobile mapping[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2008, 37(B1): 977-981.
[5] ������. Ѹ�����µ����˻�����Ӧ��[J]. ���ʺ���, 2007(10): 48-50.
HAN Shijie. UAVs will get extensive civil applications[J]. International Aviation, 2007(10): 48-50.
[6] л��. �������������˻��Ķ���������������ϵͳ���[D]. ����: ����������ѧ, 2019: 26-35.
XIE Tao. Design of multi-parameter air quality monitoring system based on four-rotor UAV[D]. Huainan: Anhui University of Science & Technology, 2019: 26-35.
[7] HYUNCHUL S D, KIM H J, SASTRY S. Control system design for rotorcraft-based unmanned aerial vehicles using time-domain system identification[C]// Proceedings of the 2000 IEEE International Conference on Control Applications. Anchorage, AK, USA: IEEE, 2000: 808-813.
[8] RAZMI H, AFSHINFAR S. Neural network-based adaptive sliding mode control design for position and attitude control of a quadrotor UAV[J]. Aerospace Science and Technology, 2019, 91: 12-27.
[9] KIM H. A flight control system for aerial robots: algorithms and experiments[J]. Control Engineering Practice, 2003, 11(12): 1389-1400.
[10] ERGINER B, ALTUG E. Design and implementation of a hybrid fuzzy logic controller for a quadrotor VTOL vehicle[J]. International Journal of Control, Automation and Systems, 2012, 10(1): 61-70.
[11] COZA C, MACNAB C J B, A ramirez-serrano, Adaptive fuzzy control for a quadrotor helicopter robust to wind buffeting[J]. Journal of Intelligent and Fuzzy Systems, 2011, 22(5): 267-283.
[12] ������. ��������: ģ���ۻ��ǿ�����[J]. ϵͳ��ѧ����ѧ, 1989, 9(4): 328-335.
HAN Jingqing. Control theory, is it a model analysis approach or a direct control approach[J]. Journal of Systems Science and Mathematical Sciences, 1989, 9(4): 328-335.
[13] ������. �Կ��ſ���������Ӧ��[J]. ���������, 1998, 13(1): 19-23.
HAN Jingqing. Auto-disturbances-rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23.
[14] ������, ��ΰ. �����Ը���-����[J]. ϵͳ��ѧ����ѧ, 1994, 14(2): 177-183.
HAN Jingqing, WANG Wei. Nonlinear tracking-differentiator[J]. Journal of Systems Science and Mathematical Sciences, 1994, 14(2): 177-183.
[15] ������, Ԭ¶��. ����-��������ɢ��ʽ[J]. ϵͳ��ѧ����ѧ, 1999, 19(3): 268-273.
HAN Jingqing, YUAN Lulin. The discrete form of tracking-differentiator[J]. Journal of Systems Science and Mathematical Sciences, 1999, 19(3): 268-273.
[16] ������. һ�ȷ�����������״̬�۲���[J]. ���������, 1995, 10(1): 85-88.
HAN Jingqing. The ��extended state observer�� of a class of uncertain systems[J]. Control and Decision, 1995, 10(1): 85-88.
[17] ������. ������״̬����������: NLSEF[J]. ���������, 1995, 10(3): 221-225.
HAN Jingqing. Nonlinear state error feedback control Law-NLSEF[J]. Control and Decision, 1995, 10(3): 221-225.
[18] ������. ��PID���������Կ��ſ��ơ�����[J]. ���ƹ���, 2002, 9(3): 13-18.
HAN Jingqing. From PID technique to active disturbances rejection control technique[J]. Basic Automation, 2002, 9(3): 13-18.
[19] ������. ����ϵͳ�е������������[J]. ���������, 1988, 3(2): 27-32.
HAN Jingqing. Linearity and nonlinearity in the feedback system[J]. Control and Decision, 1988, 3(2): 27-32.
[20] GAO Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]// Proceedings of the 2003 American Control Conference. Denver, Colorado, USA: IEEE, 2003: 4989-4996.
[21] ���, ������, ���, ��. �Կ��ſ���: �о��ɹ��ܽ���չ��[J]. ����������Ӧ��, 2017, 34(3): 281-295.
LI Jie, QI Xiaohui, WAN Hui, et al. Active disturbance rejection control: theoretical results summary and future researches[J]. Control Theory & Applications, 2017, 34(3): 281-295.
[22] ��־ǿ. �Կ��ſ���˼��̽��[J]. ����������Ӧ��, 2013, 30(12): 1498-1510.
GAO Zhiqiang. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1510.
[23] ����ǿ, ������, ������. һ�����Ϳ��Ʒ���: �Կ��ſ��Ƽ������乤��Ӧ������[J]. ����ϵͳѧ��, 2018, 13(6): 865-877.
CHEN Zengqiang, LIU Junjie, SUN Mingwei. Overview of a novel control method: active disturbance rejection control technology and its practical applications[J]. CAAI Transactions on Intelligent Systems, 2018, 13(6): 865-877.
[24] ����ǿ, ���S, ������, ��. �����Կ��ſ������ۼ�����Ӧ�õ����ɽ�չ[J]. ��Ϣ�����, 2017, 46(3): 257-266.
CHEN Zengqiang, CHENG Yun, SUN Mingwei, et al. Surveys on theory and engineering applications for linear active disturbance rejection control[J]. Information and Control, 2017, 46(3): 257-266.
[25] ������, ����, ͯ����, ��. ʱ��ϵͳ���Կ��ſ�������[J]. ����������Ӧ��, 2013, 30(12): 1521-1533.
WANG Lijun, LI Qing, TONG Chaonan, et al. Overview of active disturbance rejection control for systems with time-delay[J]. Control Theory & Applications, 2013, 30(12): 1521-1533.
[26] ������. �Կ��ſ��Ƽ���[J]. ǰ�ؿ�ѧ, 2007, 1(1): 24-31.
HAN Jingqing. Auto disturbances rejection control technique[J]. Frontier Science, 2007, 1(1): 24-31.
[27] GUO Baozhu, ZHAO Zhiliang. On convergence of nonlinear active disturbance rejection for SISO systems[C]// 2012 24th Chinese Control and Decision Conference (CCDC). Taiyuan, China: IEEE, 2012: 3507-3512.
[28] GUO Baozhu, ZHAO Zhiliang. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems & Control Letters, 2011, 60(6): 420-430.
[29] XUE Wenchao, HUANG Yi. On performance analysis of ADRC for nonlinear uncertain systems with unknown dynamics and discontinuous disturbances[C]// Proceedings of the 32nd Chinese Control Conference. Xi'an, China: IEEE, 2013: 1102-1107.
[30] ZHAO Shen, GAO Zhigiang. Active disturbance rejection control for non-minimum phase systems[C]// Proceedings of the 29th Chinese Control Conference. Beijing: IEEE, 2010: 6060-6070.
[31] ZHAO Shen, SUN Li, LI Donghai, et al. Tracking and disturbance rejection in non-minimum phase systems[C]// Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014: 3834-3839.
[32] SUN Li, LI Donghai, GAO Zhiqiang, et al. Combined feedforward and model-assisted active disturbance rejection control for non-minimum phase system[J]. ISA Transactions, 2016, 64: 24-33.
[33] LI Mingda, LI Donghai, WANG Jing, et al. Active disturbance rejection control for fractional-order system[J]. ISA Transactions, 2013, 52(3): 365-374.
[34] ��, ����, ������, ��. ���ڿ���ȫ����Ԥ����ƵĻ���ϵͳ������ͬ��[J]. ����ѧ��, 2015, 64(1): 55-61.
ZHANG Yuan, XU Qi, SUN Mingwei, et al. Control and synchronization in chaotic systems based on fast linear predictive control[J]. Acta Physica Sinica, 2015, 64(1): 55-61.
[35] ZHANG Yuan, SUN Mingwei, CHEN Zengqiang. Control and synchronization in chaotic systems based on fast linear predictive control[J]. Nonlinear Analysis: Modelling and Control, 2016, 21(5): 587-599.
[36] ��, ������, ����ǿ. ǿ��ѭ������ϵͳ�����Կ��Ž�����Ƶ�³�����[J]. ����ѧ��, 2015, 66(S2): 263-270.
ZHANG Yuan, SUN Mingwei, CHEN Zengqiang. Robust design of linear active disturbance rejection decoupling control for forced-circulation evaporation system[J]. CIESC Journal, 2015, 66(S2): 263-270.
[37] �����, ������, ������, ��. ����������ֱ�������п��Ƽ�������[J]. ������ѧ, 2012, 30(4): 295-299.
ZHEN Hongtao, QI Xiaohui, XIA Mingqi, et al. Survey of flight control technology for quad-rotor unmanned helicopter[J]. Flight Dynamics, 2012, 30(4): 295-299.
[38] ��˧. �����Կ��ż�����Qball���˻�����ϵͳ�������ʵ��[D]. ���: ���ҵ��ѧ, 2019: 42-51.
TANG Shuai. Design and implementation of Qball U-AV control system based on ADRC[D]. Tianjin: Tianjin Polytechnic University, 2019: 42-51.
[39] Ҷ����. �����Կ��ŵ�����������������ϵͳ�����ʵ��[D]. ����: ���ϿƼ���ѧ, 2019: 50-60.
YE Jianxiao. Design and implementation of quad-rotor control system based on active disturbance rejection[D]. Mianyang: Southwest University of Science and Technology, 2019: 50-60.
[40] ����ϼ. �����Կ��ż���������������������[D]. ���: ���ҵ��ѧ, 2017: 32-45.
BAO Mingxia. Attitude control of four-rotor aircraft based on ADRC[D]. Tianjin: Tianjin Polytechnic University, 2017: 32-45.
[41] �Ź��, ����, ������, ��. �����Կ��ż��������˻����������о�[J]. ��������������, 2017, 25(9): 216-218.
ZHANG Guifeng, CHEN Xiao, CUI Yanzhao, et al. Research on autonomous obstacle avoidance of UAV based on ADRC[J]. Computer Measurement & Control, 2017, 25(9): 216-218.
[42] ¬����, ����, ������, ��. ����ʸ������ת�������Կ��ŷ��п��Ʒ���[J]. ����������Ӧ��, 2020, 37(6) :1377-1387.
LU Kaiwen, YANG Zhong, ZHANG Qiuyan, et al. Active disturbance rejection flight control method for thrust vectored quadrotor with tiltable rotors[J]. Control Theory & Applications, 2020, 37(6): 1377-1387.
[43] ʷ�ڷ�. �����Կ����㷨�����������˻����������о�[D]. ����: ����������ѧ, 2017: 55-60.
SHI Tengfei. Research on the wind resistant performance of four-rotor unmanned aerial vehicle based on auto disturbances rejection algorithm[D]. Beijing: North China Electric Power University, 2017: 55-60.
[44] �Լ�ΰ. �����������������㷨�о�[D]. ��³ľ��: �½���ѧ, 2019: 57-61.
ZHAO Jiawei. Research on control algorithm of quadrotor[D]. Urumqi: Xinjiang University, 2019: 57-61.
[45] ����. ������������˷�������̬�뺽�����ٿ����о�[D]. ����: ���ִ�ѧ, 2015: 45-63.
PENG Cheng. On the attitude and trajectory tracking control for a coaxial eight-rotor unmanned aircraft[D]. Changchun: Jilin University, 2015: 45-63.
[46] �. �����Ӿ�������������������ϵ��������[D]. ֣��: ֣�ݴ�ѧ, 2016: 41-52.
LI Dong. The integrated navigation and control of hexacopter basing on vision[D]. Zhengzhou: Zhengzhou University, 2016: 41-52.
[47] ������, ������, ������. �������������Ľ�ģ������̬�Կ��ſ���[J]. ������ҵ��ѧѧ��, 2016, 42(10): 1461-1467.
RUAN Xiaogang, ZHANG Xiaorui, WANG Danyang. Modeling of three-rotor aircraft and its attitude based on ADRC[J]. Journal of Beijing University of Technology, 2016, 42(10): 1461-1467.
[48] ֣��ǿ. �����Կ��ſ��Ƶ�С������ֱ�����߶ȿ��Ƶ��о���Ӧ��[D]. ����: ����������ѧ, 2016: 47-51.
ZHENG Liqiang. The research and application of altitude control of small unmanned helicopter based on ADRC[D]. Guangzhou: South China University of Technology, 2016: 47-51.
[49] ����ǿ, ����, ������. �����Կ��ſ��Ƽ���������ֱ����λ�ÿ��������[J]. ֱ��������, 2014(2): 36-40.
WANG Gangqiang, LI Yuchuan, ZENG Guogui. Position control laws design of UAH based on ADRC[J]. Helicopter Technique, 2014(2): 36-40.
[50] ���´�, ���, ������, ��. ����ֱ���������Կ��ſ���[J]. ����������Ӧ��, 2014, 31(2): 238-243.
FANG Yongchun, SHEN Hui, SUN Xiuyun, et al. Active disturbance rejection control for heading of unmanned helicopter[J]. Control Theory & Applications, 2014, 31(2): 238-243.
[51] ������, ������, ������. С��ֱ�����Կ��ŷ��п���[J]. ���������ѧ��, 2012, 31(2): 30-34.
CHANG Guanqing, FAN Guoliang, CHANG Hongxing. Active disturbance-rejection flight control of a miniature helicopter[J]. Journal of Spacecraft TT&C Technology, 2012, 31(2): 30-34.
[52] �ⳬ, ������, ������, ��. ����LADRC������ֱ�����켣����[J]. ����ѧ��, 2015, 36(2): 473-483.
WU Chao, WANG Haowen, ZHANG Yuwen, et al. LADRC-based trajectory tracking for unmanned helicopter[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 473-483.
[53] ����Ⱥ, ������, Ӧ��, ��. ����ֱ��������LADRC��������Ƽ����Ӿ�����ʵ��[J]. �ִ����Ӽ���, 2020, 43(2): 101-105.
LIU Zequn, DAI Jiyang, YING Jin, et al. Design and visual simulation of cascade LADRC for unmanned helicopter[J]. Modern Electronics Technique, 2020, 43(2): 101-105.
[54] ����ϼ, ������, ������, ��. һ�������Կ��ſ�����������ֱ������̬���Ʒ����о�[J]. �����Ӧ���о�, 2019, 36(6): 1753-1757.
WANG Yunxia, DAI Jiyang, WANG Cunsong, et al. Research on attitude control method of unmanned helicopter based on linear active disturbance rejection control[J]. Application Research of Computers, 2019, 36(6): 1753-1757.
[55] ������, ������, �ֻ���. ������ת����������ģʽ������估�Կ��ſ���[J]. ��������, 2019, 26(4): 23-27.
WANG Dongsheng, GUO Jiandong, PU Huangzhong. Rudder distribution and active disturbance rejection control of unmanned tiltrotor aircraft in transition mode[J]. Electronics Optics & Control, 2019, 26(4): 23-27.
[56] ����ǿ, ����, Ԭ����, ��. �����Կ��ſ�����������ʽ˫����ֱ����������̬�����е�Ӧ��[J]. ����������Ӧ��, 2015, 32(9): 1219-1225.
CHEN Zengqiang, LI Yi, YUAN Zhuzhi, et al. Attitude control of tandem rotor helicopter based on cascade active disturbance rejection control[J]. Control Theory & Applications, 2015, 32(9): 1219-1225.
[57] ����, ����ǿ, ���˻�, ��. ˫�������˻����������Կ��ſ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(3): 564-571.
ZHANG Yong, CHEN Zengqiang, ZHANG Xinghui, et al. Attitude control of tandem rotor UAV based on cascade linear active disturbance rejection control[J]. Journal of Central South University(Science and Technology), 2019, 50(3): 564-571.
[58] �ܴ���. ����Ƕ��ʽ����ϵͳ�����˻��Զ���ʻ����Ƽ��Կ����㷨�о�[D]. ����: ����������ѧ, 2016: 27-32.
ZHOU Dali. The design of UAV autopilot based on embedded operating system and the ADRC algorithm research[D]. Beijing: Beijing Institute of Technology, 2016: 27-32.
[59] ������. �����Կ��ſ��Ƶķɻ�������̬�����о�[D]. �Ͼ�: �Ͼ����պ����ѧ, 2016: 37-39.
ZHANG Zhaolong. Research on aircraft flight attitude control based on active disturbance rejection control[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016: 37-39.
[60] ¥��÷, �ſ�. �����Կ������۵����˻�������������о�[J]. ��������������, 2014, 22(4): 1152-1154.
LOU Jingmei, ZHANG Ke. Study on decoupling control of UAV lateral based on auto-disturbance-rejection control theory[J]. Computer Measurement & Control, 2014, 22(4): 1152-1154.
[61] ������, ����. ���˻����п���ϵͳ���Կ�����̬�ȶ�����[J]. ң��ң��, 2012, 33(3): 62-67.
HU Haiyan, XU Min. Active disturbance rejection control of attitude stability for UAV flight control system[J]. Journal of Telemetry,Tracking and Command, 2012, 33(3): 62-67.
[62] ������, ףСƽ, ����, ��. ��Խ�³������ķ����������˻����Ʒ���[J]. ����ѧ��, 2015, 36(5): 1673-1683.
WANG Yanxiong, ZHU Xiaoping, ZHOU Zhou, et al. A control method of flying wing UAV for penetration of microburst[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(5): 1673-1683.
[63] ������, ����, �Ų�, ��. �����������˻������Կ�����̬����[J]. ������ѧ, 2017, 35(2): 30-34.
WANG Yanxiong, ZHOU Zhou, ZHANG Bo, et al. Flying-wing attitude control based on backstepping and active disturbance rejection control[J]. Flight Dynamics, 2017, 35(2): 30-34.
[64] ������, ףСƽ, ����. ����Ӧ�����Կ��ŵ��Է������˻���̬����[J]. �����뼤���, 2014, 43(5): 1594-1599.
FENG Yinan, ZHU Xiaoping, ZHOU Zhou. Adaptation cascade active disturbance rejection controller for flexible flying wing UAV attitude control[J]. Infrared and Laser Engineering, 2014, 43(5): 1594-1599.
[65] ¬����. �߿ճ���ʱ���˻����п����о�[D]. ������: ��������ҵ��ѧ, 2014: 42-49.
LU Yueliang. Research on flight control for high-altitude long-endurance unmanned aerial vehicle[D]. Harbin: Harbin Institute of Technology, 2014: 42-49.
[66] л����, κ����, ����. �����Կ��ŵ����˷������������˱����ݴ�����[J]. ս����������, 2017(6): 83-88.
XIE Menglei, WEI Xianli, WANG Huan. Passive fault-tolerant control for control surface damage of UAV based on active disturbance rejection[J]. Tactical Missile Technology, 2017(6): 83-88.
[67] ������, �ƾ���, �±���, ��. �ͷ��������Կ��ſ��������[J]. ��������������, 2017, 25(7): 136-139.
GAO Shaoting, HUANG Jingwen, CHEN Bingbin, et al. Active disturbance rejection control for micro aerial vehicle[J]. Computer Measurement & Control, 2017, 25(7): 136-139.
[68] ����, ����, ����, ��. ���˻�������Ʒ��������Կ��ſ���[C]// ȫ�潨��С��������й����շ�չ����2013���й����տ�ѧ����������ļ�. ����: �й�����ѧ��, 2013: 128-132.
ZHANG Xudong, YIN Hang, WANG Jian. et, al. UAV launched by rockets control based on ADRC[C]// Completely building a well-off society and the development of China's aviation�DProceedings of the 2013 First China Aviation Science and Technology Conference. Beijing: Chinese Aeronautical Society, 2013: 128-132.
[69] ��Ԫ��. ���/����������Կ��ż�H��³�������о�[D]. ������: ��������ҵ��ѧ, 2015: 45-56.
GU Yuanbei. ADRC and H�� robust controller design for large space/speed range vehicle[D]. Harbin: Harbin Institute of Technology, 2015: 45-56.
[70] �ս�, ������, ����ǿ, ��. ɡ�����˻������Կ��Ÿ߶ȿ���[J]. �����Ƽ���ѧѧ��, 2017, 39(6): 103-110.
TAO Jin, SUN Qinglin, CHEN Zengqiang, et al. Linear active disturbance rejection altitude control for parawing unmanned aerial vehicle[J]. Journal of National University of Defense Technology, 2017, 39(6): 103-110.
[71] ����, �Ƴ�ӱ, �״���. ���ڸĽ��Կ��ż�������������̬����[J]. ϵͳ����ѧ��, 2018, 30(8): 3124-3129.
WANG Biao, TANG Chaoying, KONG Daqing. Quadrotor attitude control based on an improved ADRC[J]. Journal of System Simulation, 2018, 30(8): 3124-3129.
[72] �ƹ���. �����Կ�������������������ϵͳ���[D]. ��: ���տƼ���ѧ, 2019: 55-59.
YAN Guilin. Design of control system for quadrotor based on auto-disturbance rejection[D]. Zhenjiang: Jiangsu University of Science and Technology, 2019: 55-59.
[73] ������. �Կ��ſ��Ƽ���: ���Ʋ�����ȷ�����صĿ��Ƽ���[M]. ����: ������ҵ������, 2008: 36-59.
Han Jingqing. Active disturbance rejection control technology: the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 36-59.
[74] ̸��, ���. С������ֱ�����Կ��ſ���[J]. ������, 2009, 31(5): 385-390.
TAN Li, JIA Peifa. Active-disturbance-rejection control of a small autonomous helicopter[J]. Robot, 2009, 31(5): 385-390.
[75] ������, ����, ��ҫ��. �Ľ�EKF���Կ��ŷɿ�ϵͳ���[J]. ���Ӽ���Ӧ��, 2018, 44(4): 18-22.
JIANG Haitao, CHANG Qing, WANG Yaoli. Design of automated disturbance flight control system based on improved EKF[J]. Application of Electronic Technique, 2018, 44(4): 18-22.
[76] ������, ��ǿ, ������, ��. ������ֱ�����������Կ����������H2/H����Ͽ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(4): 873-880.
LIU Junjie, GAO Qiang, SUN Mingwei, et al. Quadrotor helicopter control based on LADRC & nonlinear mixed H2/H�� control structure[J]. Journal of Central South University (Science and Technology), 2019, 50(4): 873-880.
[77] ��ϣ, ̷����. ��������ӦRBFNN�������Ƶ��Կ��ſ�������̬�����е�Ӧ��[J]. ������, 2019, 41(1): 9-18.
LI Xi, TAN Jianhao. Application of the active disturbance rejection control based on adaptive RBFNN noise estimating to attitude control[J]. Robot, 2019, 41(1): 9-18.
[78] ��ݼݼ, ����, ����. ����������������Կ��ŷ����߾�����̬����[J]. ϵͳ��������Ӽ���, 2010, 32(8): 1711-1715.
LI Jingjing, REN Zhang, QU Xin. Design of active disturbance rejection backstepping attitude controller for maneuvering glide vehicles[J]. Systems Engineering and Electronics, 2010, 32(8): 1711-1715.
[79] ����. ���ڷ������Կ��ŵ����˻���̬���Ʒ����о�[D]. ����: ����������ѧ, 2018: 48-56.
XU Xiang. Research on UVA attitude control based on fractional active disturbance rejection control[D]. Changchun: Changchun University of Science and Technology, 2018: 48-56.
[80] ������. ���������˻��Կ����ݴ������о�[D]. ����: ���ϿƼ���ѧ, 2019: 27-36.
LIU Xulin. Active disturbance rejection control and fault tolerant control of an unmanned quadrotor helicopter[D]. Mianyang: Southwest University of Science and Technology, 2019: 27-36.
[81] ������, ����Ӣ. ���������˻�ʱ��ģ���Կ����ݴ�����[J]. ��ؼ���, 2020, 39(1): 55-60.
LIU Xulin, GUO Yuying. Fault-tolerant control of quadrotor UAV based on fuzzy active disturbance rejection control and time delay control[J]. Measurement & Control Technology, 2020, 39(1): 55-60.
[82] ������, ���ƽ�, ����. ���������¸߳����ٷ������Ļ�ģ�Կ��ſ���[J]. ϵͳ����ѧ��, 2017, 29(10): 2391-2396.
CHENG Mingzhi, WU Yunjie, MA Fei. Sliding mode auto-disturbance rejection control of hypersonic vehicle under disturbance[J]. Journal of System Simulation, 2017, 29(10): 2391-2396.
[83] ����, ������, �����, ��. ���������˻���ģ�Կ��ſ���[J]. ����ʦ����ѧѧ��(��Ȼ��ѧ��), 2018, 36(2): 56-62.
TANG Tang, LUO Xiaoshu, LU Wande, et al. Sliding mode active disturbance rejection control of quadrotor unmanned aerial vehicle[J]. Journal of Guangxi Normal University (Natural Science Edition), 2018, 36(2): 56-62.
[84] ����. ���������˻���̬���Կ��ſ����㷨�о�[D]. ����: ����ʦ����ѧ, 2018: 21-32.
TANG Tang. Research on active disturbance rejection control algorithms for quadrotor UAV attitude[D]. Guilin: Guangxi Normal University, 2018: 21-32.
[85] ��Һ�. �Կ��ſ��ƵĸĽ����������������˻��ϵ�Ӧ��[D]. ����: ���Ŵ�ѧ, 2018: 29-34.
LI Jiahao. Improvement of ADRC with applications to quadrotor UAVs[D]. Xiamen: Xiamen University, 2018: 29-34.
[86] ��ݼ��. ����LESO�����˻����ܱ���Կ��Ż�ģ�����о�[D]. ����: �㶫��ҵ��ѧ, 2018: 31-36.
ZHAO Jingxiang. Research on active disturbance rejection sliding mode control for UAVs close formation based on LESO[D]. Guangzhou: Guangdong University of Technology, 2018: 31-36.
[87] ������. ���ڻ�ģ�Կ��ż��������������˻������о�[D]. ���: ���������ѧ, 2019: 41-56.
CHE Jianfeng. Research on control of qaudrotor UAV based on sliding mode active disturbance rejection technology[D]. Tianjin: Tianjin University of Technology, 2019: 41-56.
[88] ����, ���»�, ���, ��. �������������Կ�����̬����[J]. ���������, 2016, 33(3): 71-75.
LIU Min, JI Yuehui, LI Junfang, et al. Active disturbance rejection attitude control for quadrotor aircraft[J]. Computer Simulation, 2016, 33(3): 71-75.
[89] ��, ����ϣ, �Ű. ���������˻�ģ���Կ�����̬���Ƽ��ȶ��Է���[J]. �й����Լ���ѧ��, 2015, 23(6): 824-830.
DOU Jingxin, KONG Xiangxi, WEN Bangchun. Attitude fuzzy active disturbance rejection controller design of quadrotor UAV and its stability analysis[J]. Journal of Chinese Inertial Technology, 2015, 23(6): 824-830.
[90] ����. ���˻��������Կ��ſ��Ʒ����о�[D]. ������: ��������ҵ��ѧ, 2013: 51-57.
CAO Yu. Research of nonlinear active disturbance rejection control with applications to unmanned aerial vehicle[D]. Harbin: Harbin Institute of Technology, 2013: 51-57.
[91] ������. �����Կ��ſ�������������ϵͳ������Ż�[D]. ̫ԭ: ̫ԭ������ѧ, 2019: 45-49.
JIANG Haitao. The design and optimization of four-rotor system based on active disturbance rejection controller[D]. Taiyuan: Taiyuan University of Technology, 2019: 45-49.
[92] ���Ľ�. ���������˻����Կ��ſ���[D]. ����: ����������ѧ(����), 2019: 35-40.
HAN Wenjie. Active disturbance rejection control of quadrotors[D]. Beijing: North China Electric Power University, 2019: 35-40.
[93] Ҷ��. ���������Կ��ŵ��������������߶Ⱥ���̬�����о�[D]. ����: ���Ŵ�ѧ, 2018: 37-41.
YE Bo. Research on altitude and attitude control of quadrotor based on linear active disturbance rejection control[D]. Xiamen: Xiamen University, 2018: 37-41.
[94] ������. ���������˻��Կ�����̬����[D]. ����: ����������ѧ, 2018: 17-29.
LIU Jiantao. Active disturbances rejection attitude control of quadrotor UAV[D]. Beijing: North China Electric Power University, 2018: 17-29.
[95] ���Ƿ�. ����GA-ADRC�����������п���ϵͳ���[D]. ����: ���Ŵ�ѧ, 2018: 47-59.
HU Qiaofeng. Control system design of the quad-rotor based on GA-ADRC[D]. Xiamen: Xiamen University, 2018: 47-59.
[96] ���, ������, �º�. ���������˻���̬�ǿ���ϵͳ���[J]. ������Ϣ�Ƽ���ѧѧ��(��Ȼ��ѧ��), 2018, 33(1): 1-9.
LI Guo, FENG Xiaoming, CHEN Hao. Design of attitude angle control system for quadrotor[J]. Journal of Beijing Information Science & Technology University, 2018, 33(1): 1-9.
[97] ��ǿ. ����ģ���Կ��ŵ����������˷���������[C]// �й�����ѧ��.2016(������)�й��������˼�ʻ������ϵͳ������ļ�. ����: ������ҵ������, 2016: 102-109.
CHEN Qiang. Four-rotor unmanned aerial vehicle control based on fuzzy active disturbance rejection[C]// Chinese Aeronautical Society. Proceedings of the 2016 (6th) China International Unmanned Aircraft System Conference. Beijing: National Defense Industry Press, 2016: 102-109.
[98] ����. ����ADRC�����������п��������[D]. ����: ������ѧ, 2013: 41-49.
ZHANG Ting. Controller design of the quad-rotor based on ADRC[D]. Shenyang: Northeastern University, 2013: 41-49.
[99] ����, ����, ������, ��. С������ֱ�������������Կ��ſ���[J]. ũҵ��еѧ��, 2017, 48(5): 22-27.
DING Li, MA Rui, SHAN Wentao, et al. Linear active disturbance rejection control for yaw channel of small-scale unmanned helicopter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(5): 22-27.
[100] ����, �κ���, ��С��, ��. ���ڱ�Ȩ�ر����Ⱥ�Ż������˻����м����Կ��ſ��������[J]. ����ѧ��, 2020, 41(1): 261-270.
FEI Lun, DUAN Haibin, XU Xiaobin, et al. ADRC controller design for UAV based on variable weighted mutant pigeon inspired optimization[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 261-270.
[101] ����, �콡, ��ǿ, ��. ���˷�ͧ���Կ��ſ����о��Ϳ������Ż�[J]. ���㼼�����Զ���, 2019, 38(4): 1-8.
LONG Fei, XU Jian, LIU Qiang, et al. Active disturbance rejection control of unmanned airship and its optimization[J]. Computing Technology and Automation, 2019, 38(4): 1-8.
[102] ���ı�. �Կ��ŷ��п���������������Ⱥ�Ż��㷨����Ӧ���о�[D]. �Ϻ�: �Ϻ����̼�����ѧ, 2016: 31-52.
YU Wenbin. A PSO algorithm for the parameter tunning of ADRC and its application research[D]. Shanghai: Shanghai University of Engineering Science, 2016: 31-52.
[103] ������. �����Կ����㷨�����������˻�����ϵͳ�о�[D]. ����: ����ʦ����ѧ, 2019: 41-47.
CHEN Linqi. Research on control system of quad-rotor UAV based on active disturbance rejection controller[D]. Guilin: Guangxi Normal University, 2019: 41-47.
[104] ���. �Կ��ſ��Ƽ������������������е�Ӧ���о�[D]. ����: ����������ѧ, 2018: 47-56.
MA Zheng. Application of active disturbance control technology in quadrotor[D]. Beijing: North China Electric Power University, 2018: 47-56.
[105] ǿ�Ѿ�, ������, ����. ���˻������Ż��Կ��ű�ӱ��ֿ��������[J]. ������ѧ, 2020, 38(1): 46-53.
QIANG Jiajiu, MENG Xiuyun, WU Guanghui. Design of parameter optimization active disturbance rejection controller for UAV formation[J]. Flight Dynamics, 2020, 38(1): 46-53.
[106] ������, ���. ���ڸĽ�����Ⱥ�㷨���������Կ��ſ������Ż����[J]. �����Ӧ���о�, 2019, 36(6): 1762-1766.
HU Dandan, ZHANG Yuchen. ADRC controller optimization design based on improved PSO algorithm for quad-rotor[J]. Application Research of Computers, 2019, 36(6): 1762-1766.
(�༭ ����ƽ)
�ո����ڣ� 2020 -05 -29; �����ڣ� 2020 -07 -03
������Ŀ(Foundation item)��ֱ������������ѧ���Ҽ��ص�ʵ���һ���������Ŀ(9140C400504130C4148)�����ո�У����ѧ�ƽ��蹤�̻���������Ŀ(2021��) (Project(9140C400504130C4148) supported by the National Key Laboratory of Rotorcraft Aeromechanics Fund Program of China; Project(2021) supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions of China)
ͨ�����ߣ����������ʿ�����ڣ�����ֱ����������ѧ�������о���E-mail��xjfae@nuaa.edu.cn
���ø�ʽ�� ����Ը, �����. ���˷������Կ��ſ����о���չ[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2021, 52(4): 1197-1212.
Citation: SHEN Suiyuan, XU Jinfa. Research progress in active disturbance rejection control of unmanned aerial vehicle[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1197-1212.

