…ÓV–Õőř»ňÕ߳ž”÷ ŃŅľ∆ň„ľį∆š”įŌž
ňÔļģĪý£¨◊řĺĘ£¨◊Įľ—‘į£¨ő‚Ļß–ň
(ĻĢ∂ŻĪűĻ§≥Őīů—ß ňģŌ¬÷«ń‹Ľķ∆ų»ňľľ ű÷ōĶ„ Ķ—ť “, ļŕŃķĹ≠ ĻĢ∂ŻĪű£¨150001)
’™“™£ļ’Ž∂‘ń≥…ÓVÕß–Õőř»ňÕßĻŖ–‘ņŗňģ∂ĮѶĶńľ∆ň„∑Ĺ∑®ĹÝ––—–ĺŅ£¨≤…”√Hess-Smith∑Ĺ∑®ľ∆ň„»żő¨őÔŐŚ‘ŕŃųŐŚ÷–‘ň∂ĮĶńłĹľ”÷ ŃŅ≤Ęĺ≠Õ÷«Úň„ņż—ť÷§°£‘ŕ Ķľ ľ∆ň„÷–łý図√Õßń£–Õ ‘—ť≤‚Ķ√Ķń…ż≥Ńľį◊›«„Ĺ«Ķ√ĶĹ∆š»ŽňģŐŚĽżľį–ő◊ī£¨≥š∑÷Ņľ¬«Ľ¨––ÕßļĹňŔ∂‘łĹľ”÷ ŃŅĶń”įŌž°£Ĺ®ŃĘőř»ňÕß6◊‘”…∂»‘ň∂Į∑Ĺ≥Ő£¨∑÷Īū Ļ”√ĺ≠—ťĻę ĹļÕHess-Smith∑Ĺ∑®Ķ√ĶĹĶń2◊ťłĹľ”÷ ŃŅ÷Ķ∂‘őř»ňÕß‘ň∂Į◊īŐ¨ĹÝ––∑¬’śľ∆ň„£¨≤ĘĹęĹŠĻŻ”Ž ĶÕßļ£ ‘ĹŠĻŻĹÝ––∂‘Ī»°£∂‘Ī»ĹŠĻŻĪŪ√ų£ļłĹľ”÷ ŃŅ∂‘őř»ňÕßĶń‘ň∂Į◊īŐ¨”–“Ľ∂®”įŌž£¨‘ŕľ∆ň„Ľ¨––Õ߳ž”÷ ŃŅ Ī£¨Ņľ¬«ļĹňŔ”įŌžĶń∑¬’śĹŠĻŻłŁľ”Ŕţ’ś Ķ«ťŅŲ°£
ĻōľŁī £ļőř»ňÕߣĽ…ÓV–ÕĽ¨––ÕߣĽłĹľ”÷ ŃŅ£ĽHess-Smith∑Ĺ∑®
÷–Õľ∑÷ņŗļŇ£ļU661.3 őńŌ◊ĪÍ÷嬎£ļA őń’¬ĪŗļŇ£ļ1672-7207(2011)S1-0567-07
Calculation of added mass to deep-V unmanned surface vehicle and its effect
SUN Han-bing, ZOU Jin, ZHUANG Jia-yuan, WU Gong-xing
(State Key Laboratory of Autonomous Under Water Vehicle, Harbin Engineering University, Harbin 150001, China)
Abstract: A computation method for calculating added mass of an unmanned surface vehicle (USV) maneuvering in water was developed using Hess-Smith method, which was verified by the ellipsoid. Based on the results of model tests, the trim angle and the draft were obtained to calculate water entry shape of the USV, so that the influence of speed to added mass was considered. Then the six-degree-of-freedom dynamic equations were established according to theory mechanics, and different parameters of USV motion were achieved with the results of the empirical formula and Hess-Smith method respectively. Finally, the results were compared with the sea-experiments results of USV. The results show that the added mass has a considerable effect on USV motion and the simulation result considering speed effect is more approach to the actual situation, the feasibility of the method is verified.
Key words: unmanned surface vehicle; deep-V planing-hull; added mass; Hess-Smith method
ĹŁńÍņī£¨“Ľ÷÷–¬–Õ÷«ń‹ňģ√śőř»ňÕß ‹ĶĹ ņĹÁłų÷ų“™«ŅĻķĶńłŖ∂»÷ō ”£¨Ķ√ĶĹŃňŅžňŔ∑Ę’Ļ[1]°£ńŅ«į“—”–∂ŗ÷÷őř»ňÕß”¶”√”ŕĺŁ ¬°ĘŅ∆—–Ķ»Ńž”Ú[2]°£őř»ňÕß «÷ł“‘“£ŅōĽÚ◊‘÷ųń£ Ĺ‘ŕňģ√śļĹ––ĶńļĹ––∆ų£¨ń‹ĻĽ÷ī––ő£ Ō’°ĘŅ›‘Ô“‘ľį∆šňŻ≤Ľ ”ŕ”–»ňī¨÷Ľ÷ī––ĶńĺŁ ¬»őőŮ£¨ «ňģ÷–«ťĪ® ’ľĮ°Ęľŗ ”°Ę’ž≤žĶ»ĺŁ ¬”√Õĺ≤ĽŅ…∂ŗĶ√Ķńňģ√ś‘ōŐŚ[3-4]°£ńŅ«įőř»ňÕßĶńĶš–ÕīķĪŪ÷ų“™”–£ļ√ņĻķĶń°įSPARTAN°ĪļŇ°Ę“‘…ęŃ–Ķń°įProtector°ĪļŇ°Ę“‚īůņŻĶń°įCharlie°ĪļŇňęŐŚ–ÕUSV[5]ļÕ”ĘĻķĶń°įSpringer°ĪļŇňęŐŚ–ÕUSV[6]°Ę∆ŌŐ——ņĶń°įDelfim°ĪļŇňęŐŚ–ÕUSVĶ»°£
”…”ŕőř»ňÕß“™«ůłŖļĹňŔ£¨“Úīň£¨Īĺ—–ĺŅ÷–Ķńőř»ňÕß≤…”√…ÓVĽ¨––Õß–Õ◊ųő™∆š◊ų’Ĺ∆ĹŐ®°£Ľ¨––Õß‘ŕłŖňŔ–°ÕßŃž”Ú÷–”–◊Ň÷ō“™ĶōőĽ£¨÷ų“™“ņŅŅļĹ–– ĪÕßŐŚ≤ķ…ķĶńŃųŐŚ∂Į…żŃ¶÷ßÕ–īů≤Ņ∑÷ÕßŐŚ÷ ŃŅ[7]°£∂Ý”…”ŕőř»ňÕß»őőŮŐō–‘£¨“™«ů∆šĪō–ŽĺŖ”–◊‘÷ųļĹ––ļÕį≤»ęļĹ––Ķńń‹ Ѷ£¨—–ĺŅ∆š ‹Ń¶«ťŅŲļÕ‘ň∂Į«ťŅŲĺÕŌ‘Ķ√”»ő™÷ō“™°£ńŅ«į£¨ĻķńŕĻō”༨––Õß ‹Ń¶∑÷őŲĶń—–ĺŅīś‘ŕ◊Ňļ‹īůŅ’ľš°£Ņľ¬«ĶĹőř»ňÕßĺŖ”–ļĹňŔłŖ°ĘŇŇňģŃŅ–°ľįňģ∂ĮѶŐō–‘łī‘”Ķ»ŐōĶ„£¨∂Ý∂‘∆šňģ∂ĮѶĹÝ––∑÷őŲľ∆ň„ń‹ĻĽő™őř»ňÕßĶń‘ň∂ĮŅō÷∆ŐŠĻ©Ľýī°£¨“Úīň£¨∂‘Ľ¨––ÕßĶń—–ĺŅ”–◊Ň÷ō“™Ķń—–ĺŅ“‚“Śľį Ķ”√ľŘ÷Ķ°£
Īĺőń◊ų’Ŗ÷ōĶ„—–ĺŅł√őř»ňÕßĻŖ–‘ņŗňģ∂ĮѶ°£ĶĪőÔŐŚľ”ňŔ‘ň∂Į Ī£¨ĽŠīÝ∂Į÷‹őßŃųŐŚ“Ľ∆ū‘ň∂Į£¨īň Ī≤ķ…ķĶńŃųŐŚĻŖ–‘ѶŅ…”√łĹľ”÷ ŃŅņīĪŪ ĺ[8]°£÷ŕňý÷‹÷™£¨łýĺ›ŃųՌѶ—ß‘≠ņŪ£¨ŐŚĽż‘ĹīůĶńőÔŐŚňý ‹ĶĹĶńŃųŐŚĻŖ–‘Ѷ‘Ĺīů£¨∂Ý«“‘ŕ◊ÝĪÍŌĶ—°∂®ļů£¨‘ŕ“Ľį„«ťŅŲŌ¬£¨łĹľ”÷ ŃŅĹŲ”ŽőÔŐŚĶńľłļőÕ‚–ő”–Ļō°£ņŻ”√ņŪ¬ŘŃųՌѶ—ß÷™ ∂Ņ…“‘ľ∆ň„ľÚĶ•ľłļőŐŚ»Á‘≤«Ú°ĘÕ÷«ÚĶ»ĶńłĹľ”÷ ŃŅ£¨∂Ý‘ŕ Ķľ Ļ§≥Ő÷–”ŲĶĹĶńőÔŐŚ£¨–ő◊īīů∂ľ≤Ľ «ľÚĶ•ľłļő ŐŚ£¨ńŅ«į÷ų“™≤…”√“‘Ō¬3÷÷∑Ĺ∑®ņī«ůĹ‚»żő¨őÔŐŚĶńłĹľ”÷ ŃŅ£ļīŅĻņň„∑®°Ę«–∆¨∑®ļÕĪŖĹÁ‘™∑®( ∆ŃųņŪ¬Ř∑®)[9]°£īŅĻņň„∑® «÷ł”√ņŪ¬ŘŃųՌѶ—ßĶľ≥ŲĶńÕ÷«ÚŐŚĶ»ľÚĶ•ľłļőŐŚĶńłĹľ”÷ ŃŅ£¨ī”∂ÝĹŁň∆Ļņň„Ōł≥§ŐŚĶńłĹľ”÷ ŃŅ°£ňš»Ľ‘ŕľ∆ň„Ōł≥§ŐŚ Ī–ßĻŻļ‹ļ√£¨Ķęł√∑Ĺ∑®ĺŖ”–“Ľ∂®Ķńĺ÷Ōř–‘£Ľ«–∆¨∑® «÷ł—ōőÔŐŚ÷ŠŌŖ∑ĹŌÚĹę∆š∑÷≥…∂ŗ∂ő£¨√Ņ“Ľ–°∂őĶńłĹľ”÷ ŃŅįīŌŗÕ¨ľłļő–ő◊īĶń∂Ģ‘™őÔŐŚĶńłĹľ”÷ ŃŅĻę Ĺľ∆ň„£¨»Ľļů£¨į—ň„Ķ√Ķńłų∂őłĹľ”÷ ŃŅĶĢľ”∆ūņī£¨Ķ√ĶĹł√őÔŐŚĶńłĹľ”÷ ŃŅ£ĽĪŖĹÁ‘™∑®(BEM) «ĹęőÔŐŚĪŪ√śĽģ∑÷Ķ•‘™£¨‘ŕ√Ņ“ĽłŲĶ•‘™…Ō≤ľ÷√«Ņ∂»īż∂®ĶńĽýĪĺĹ‚£¨»Á‘ī°ĘĽ„°ĘŇľľę◊”Ķ»£¨ī”∂Ý»∑∂®Ńų≥°ňŔ∂» ∆£¨ĹÝ∂ÝĶ√Ķųž”÷ ŃŅ[10]£¨ĺŖ”–ĹŌłŖĶńĺę∂»°£ŃŪÕ‚£¨ňś◊Ňľ∆ň„ĽķĶńłŖňŔ∑Ę’Ļ£¨≤…”√CFDĶ» ż÷Ķ∑Ĺ∑®ľ∆ň„ī¨≤į łĹľ”÷ ŃŅĶ√ĶĹŃňĻ„∑ļĶń”¶”√[11-12]°£
Īĺ—–ĺŅĶń—–ĺŅ∂‘ŌůĺŖ”–Ľ¨––Õßňģ∂ĮѶŐō–‘£¨ňś◊ŇļĹňŔĪšĽĮ£¨∆šļĹ––◊īŐ¨ļÕ»ŽňģĶńī¨ŐŚ–ő◊ī“≤“™ňś÷ģĪšĽĮ£¨Ļ ∆šłĹľ”÷ ŃŅ≤ĽĶ•Ķ• «–ő◊īŐŚĽżĶ»őÔņŪ≤ő żĶńļĮ ż£¨ĽĻ «“ĽłŲ”ŽļĹňŔ”–ĻōĶńļĮ ż°£Ķ•īŅ“ņŅŅņŪ¬Ř∑Ĺ∑®ĽÚĺ≠—ťĻę ĹĹÝ––ľ∆ň„“—ĺ≠≤Ľń‹¬ķ◊„◊ľ»∑–‘“™«ů°£Ņ… ľŻ£¨∂‘őř»ňÕ߳ž”÷ ŃŅĹÝ––…Ó»Ž—–ĺŅ « ģ∑÷Īō“™Ķń£¨Īĺ—–ĺŅ≤…”√Hess-Smith∑Ĺ∑®ņīľ∆ň„őř»ňÕ߳ž”÷ ŃŅ£¨≤Ę”Ž Ķī¨ļ£ ‘ĹŠĻŻ∂‘Ī»£¨—ť÷§∑Ĺ∑®ĶńŅ…–––‘°£
1 ∂ĮѶ—ßń£–ÕĹ®ŃĘľį∑÷őŲ
1.1 ◊ÝĪÍŌĶľį‘ň∂Į∑Ĺ≥ŐĶńĹ®ŃĘ
ő™Ńňį—łī‘”ĶńőÔņŪ ņĹÁ”√ ż—ßĻę Ĺ√Ť Ų£¨Īĺ—–ĺŅĹÝ––»ÁŌ¬ĽýĪĺľŔ…Ť£ļ
(1) ľŔ…Ťļ£√ś «ĻŖ–‘≤őŅľŌĶ£¨ľīľŔ…ŤĶō√ś◊ÝĪÍŌĶő™ĻŖ–‘◊ÝĪÍŌĶ£Ľ
(2) ļŲ¬‘Ķō«Ú«ķ¬ £¨į—ļ£√śŅī≥…∆Ĺ√ś£Ľ
(3) ÷ōѶľ”ňŔ∂»°Ęīů∆Ý√‹∂»“‘ľįļ£ňģ√‹∂»ļ„∂®£Ľ
(4) ł√őř»ňÕßÕßŐŚ «ł’ŐŚ£¨«“÷ ŃŅő™≥£ ż£Ľ
(5) ł√őř»ňÕßÕßŐŚ «“‘◊›∆ √ś∂‘≥∆Ķń°£
ő™Ńň√Ť Ųőř»ňÕßĶń‘ň∂Į◊īŐ¨£¨≤…”√Ō¬ Ų2łŲ”“ ÷÷ĪĹ«◊ÝĪÍŌĶ£ļ1łŲ «ĻŐ∂®◊ÝĪÍŌĶO-XEYEZE(“‘Ō¬ľÚ≥∆°į∂®ŌĶ°Ī)ĻŐŃ™”ŕĶō«ÚĪŪ√ś£¨O «»ő“‚—°∂®ĶńĻŐ∂®”ŕĶō«ÚĪŪ√śĶń“ĽĶ„£¨Õ®≥£Ņ…—°‘Ů‘ŕń≥“Ľ ĪŅŐ(t=0 Ī)őř»ňÕß÷ō–ńGňý‘ŕőĽ÷√£¨OXE÷Š‘ŕĺ≤ňģ√śńŕ£¨∆š∑ĹŌÚ“Ľį„—°‘ŕőř»ňÕß◊‹Ķń‘ň∂Į∑ĹŌÚ…Ō£ĽŅľ¬«∑ÁņňŃų Ī÷łŌÚ’żĪĪ∑Ĺ ŌÚ£¨OYE÷Š—°‘Ůő™OXE÷Š‘ŕĺ≤ňģ√śńŕň≥ Ī’Ž–ż◊™90°„Ķń∑ĹŌÚ…Ō£¨OZE÷ŠīĻ÷Ī”ŕĺ≤ňģ√ś£¨“‘÷łŌÚĶō–ńő™’ż£ĽŃŪÕ‚1łŲ «‘ň∂Į◊ÝĪÍŌĶG-xyz(ľÚ≥∆°į∂ĮŌĶ°Ī)ĻŐŃ™”ŕőř»ňÕߣ¨ňś∆š“Ľ∆ū‘ň∂Į°£∂ĮŌĶĶń‘≠Ķ„‘ŕ÷ō–ńG£¨∆š◊ÝĪÍ÷ŠGx£¨GyļÕGz∑÷Īū «ĺ≠ĻżGĶń”ŽňģŌŖ√ś°ĘļŠ∆ √śļÕ◊›÷–∆ √śĶńĹĽŌŖ°£’ż∑īŌÚįī”“ ÷ŌĶĶńĻś∂®£¨ľīGxŌÚ ◊£¨GyŌÚ”“£¨GzŌÚŌ¬£¨ľŻÕľ1°£

Õľ1 őř»ňÕßĶń∂®ŌĶľį∂ĮŌĶ
Fig.1 Earth-fixed and body-fixed coordinate system of USV
◊ÝĪÍŌĶĹ®ŃĘ÷ģļů£¨łýĺ›Ň∑ņ≠∑Ĺ≥Őľį÷ –ń‘ň∂Į∂® ņŪ£¨Ōŗ∂‘”ŕ÷ –ń‘ň∂ĮĶń∂ĮŃŅĺō∂®ņŪŅ…“‘Õ∆Ķľ≥ŲĽ¨––Õß6◊‘”…∂»≤Ŕ◊›‘ň∂Įń£–Õ£¨ľī
 (1)
(1)
Ĺ÷–£ļu£¨vļÕw∑÷Īūő™őř»ňÕß÷ō–ńī¶ĶńňŔ∂»V‘ŕG- xyz◊ÝĪÍx£¨yļÕz∑ĹŌÚ…ŌĶńÕ∂”į£Ľp£¨qļÕr∑÷Īūő™Ĺ«ňŔ∂»W‘ŕx£¨yļÕz∑ĹŌÚ…ŌĶńÕ∂”į£ĽX£¨YļÕZ∑÷Īūő™Ń¶F‘ŕx£¨yļÕz∑ĹŌÚ…ŌĶńÕ∂”į£ĽL£¨MļÕN∑÷Īūő™Ń¶ĺōH‘ŕx£¨yļÕz∑ĹŌÚ…ŌĶńÕ∂”į£Ľ £¨
£¨ £¨
£¨ £¨
£¨ £¨
£¨ ļÕ
ļÕ «łųŌŗ”¶≤ő żĶńľ”ňŔ∂»°£
«łųŌŗ”¶≤ő żĶńľ”ňŔ∂»°£
1.2 őř»ňÕß ‹Ń¶∑÷őŲ
Ľ¨––Õß”Ž“Ľį„ŇŇňģ Ĺī¨≤įŌŗĪ»ĺŖ”–ļ‹īůĶń≤ĽÕ¨£¨∆š‘ň∂Į◊īŐ¨łýĺ›ŐŚĽżłĶ»ÍĶ¬ żŅ…∑÷ő™[13]£ļ
(1) ŇŇňģļĹ––◊īŐ¨( £ľ1.0)°£‘ŕīňĹ◊∂ő£¨Õß÷ōīů≤Ņ∑÷”…ł°Ń¶÷ß≥÷£¨∆šÕßŐŚ ‹Ń¶ĽýĪĺ…Ō”Ž∆’Õ®ĶńŇŇňģ–Õī¨÷ĽŌŗÕ¨°£
£ľ1.0)°£‘ŕīňĹ◊∂ő£¨Õß÷ōīů≤Ņ∑÷”…ł°Ń¶÷ß≥÷£¨∆šÕßŐŚ ‹Ń¶ĽýĪĺ…Ō”Ž∆’Õ®ĶńŇŇňģ–Õī¨÷ĽŌŗÕ¨°£
(2) Ļż∂…ļĹ––◊īŐ¨(1.0£ľ£ľ3.0)°£Õß÷ō”…ŃųŐŚĺ≤ł°Ń¶ļÕ∂Į…żŃ¶÷ß≥÷£¨ňś◊ŇļĹňŔ…żłŖ£¨∂Į…żŃ¶‘Ųľ”£¨ĺ≤ł°Ń¶ľű…Ŕ°£
(3) Ľ¨––◊īŐ¨(£ĺ3.0)°£Õß÷ōľłļűÕͻꔅŃųŐŚ∂Į…żŃ¶÷ß≥÷°£
”…”༨––ÕßĺŖ”–’‚3łŲ ‹Ń¶ÕÍ»ę≤ĽÕ¨ĶńļĹ––◊īŐ¨£¨Īĺ—–ĺŅłýĺ› ‹Ń¶∑÷ņŗ∑®ņī∑÷őŲĽ¨––Õß‘ŕļĹ––Ļż≥Ő÷– ‹ĶĹĶńłų÷÷ѶļÕѶĺō£¨Ĺ꼨––ÕßĶń ‹Ń¶∑÷ő™÷ōѶ°Ęł°Ń¶°Ęňģ∂ĮѶľįÕ‚Ń¶£¨“‘īňņī∑÷őŲĽ¨––Õß ‹ĶĹĶńłų÷÷Ѷ(ĺō)£¨ľ»ľśĻňŃňĶÕňŔ Ī’ľīů≤Ņ∑÷Ķńĺ≤ňģѶ£¨”÷Ņľ¬«ŃňłŖňŔ Ī∂Į…żŃ¶∂‘Ľ¨––ÕßĶń”įŌž°£
Ō¬√ś÷ōĶ„∑÷őŲł√őř»ňÕßĶńĻŖ–‘ņŗňģ∂ĮѶ£¨ĻŖ–‘ņŗňģ∂ĮѶ «÷łī¨‘ŕőřŌř…ÓĻ„Ķń∆Ĺĺ≤ňģ√ś…Ō◊Ų≤Ŕ◊›‘ň∂Į Ī”…ĻŖ–‘“ż∆ūĶńňģ∂ĮѶ°£”…ŃųՌѶ—ß‘≠ņŪŅ…÷™£¨őÔŐŚ‘ŕőřĪŖľ ņŪŌŽŃųŐŚ÷–Ńų∂Į Ī£¨ŃųŐŚ»Ň∂Į‘ň∂ĮĶń∂Įń‹ő™£ļ
 (2)
(2)
∆š÷–£ļv1=u£Ľv2=v£Ľv3=w£Ľv4=p£Ľv5=q£Ľv6=r°£∂ݶňijŅ…◊ť≥…“ĽłŲ6°Ń6Ķńĺō’ů£¨’‚ņÔĶńłĹľ”÷ ŃŅ «Ļ„“ŚĶń£¨ĺŖ”–≤ĽÕ¨Ķń“Úīő°£ĶĪi, j=1, 2, 3 Ī£¨¶ňijĶńŃŅłŔ «÷ ŃŅ£Ľ‘ŕi, j=4, 5, 6 Ī£¨¶ňijĺŖ”–÷ ŃŅĻŖ–‘ĺōĶńŃŅłŔ°£
Ĺę Ĺ(2)’ĻŅ™Ķ√ĶĹ£ļ
 (3)
(3)
∂ÝŃųŐŚ»Ň∂Į‘ň∂ĮĶń∂ĮŃŅ”Ž∂Įń‹”–“‘Ō¬ĻōŌĶ£ļ

 (4)
(4)
ňśī¨‘ň∂Į◊ÝĪÍŌĶļÕĻŐ∂®◊ÝĪÍŌĶ÷ģľš∂ĮŃŅļÕ∂ĮŃŅĺōĶń◊™ĽĽĻōŌĶ»ÁŌ¬£ļ
 (5)
(5)
ī¨≤įňý ‹ĻŖ–‘ņŗňģ∂ĮѶFIļÕѶĺōMIő™£ļ
 (6)
(6)
Ĺę Ĺ(3)īķ»Ž Ĺ(4)÷–£¨Ņ…Ķ√∂ĮŃŅĪŪīÔ Ĺ£¨Ĺę∆šľį Ĺ(5)“Ľ∆ūīķ»Ž Ĺ(6)ľīŅ…Ķ√ĶĹ6◊‘”…∂»‘ň∂Į Ī£¨◊ų”√”ŕī¨ŐŚĶńĻŖ–‘ņŗňģ∂ĮѶ£¨‘ŕīňĽýī°…Ō–ī≥…”–ĻōĶńÕ∂”į Ĺ≤Ęłý囼¨––ÕßÕß–ÕĶńŐō ‚–‘(ÕßĶ◊–ő◊īĪ»ĹŌĪ‚∆Ĺ)ľįłĹľ”÷ ŃŅĺō’ůĶńĻŐ”–Őō–‘∂‘∆šĹÝ––ľÚĽĮ£¨»Ōő™≥żłĹľ”÷ ŃŅŌĶ żĺō’ů∂‘Ĺ«ŌŖ…ŌĶńŌĶ żī¶£¨∆šňŻ∂ľ»°0÷Ķ£¨Ķ√ĶĹ£ļ
 (7)
(7)
Ņ…ľŻ£ļ»∑∂®ĻŖ–‘ņŗňģ∂ĮѶĶń÷ų“™Ļ§◊ų «»∑∂®…Ō Ĺ÷–Ķń6łŲłĹľ”÷ ŃŅ£¨ľī¶ň11£¨¶ň22£¨¶ň33£¨¶ň44£¨¶ň55ļÕ¶ň66°£
2 łĹľ”÷ ŃŅľ∆ň„
2.1 Hess-Smith∑Ĺ∑®
20 ņľÕ60ńÍīķ£¨√ņĻķĶńHessļÕSmith∑Ę’ĻŃň1÷÷ľ∆ň„»ő“‚»żő¨őÔŐŚ ∆ŃųĶń∑Ĺ∑®[14]°£’‚“Ľ∑Ĺ∑®≥∆ő™Hess-Smith∑Ĺ∑®°£ňŁ «÷ł”√–Ū∂ŗ∆Ĺ√śňńĪŖ–őĪŪ√śĶ•‘™(ŃŘ∆¨)ĹŁň∆ĪŪ ĺőÔ√ś£¨√ŅłŲĶ•‘™…Ō≤ľ÷√“ĽłŲ«Ņ∂»őī÷™Ķń‘ī£¨»Ľļů£¨‘ŕőÔŐŚĪŪ√śĶńń≥–©Ņľ≤žĶ„…Ō¬ķ◊„∑®ŌÚňŔ∂»ő™Ń„ĶńőÔ√śĪŖĹÁŐűľĢ£¨Ķ√ĶĹ«ůĶ•‘™‘ī√‹∂»ĶńŌŖ–‘īķ ż∑Ĺ≥Ő◊ť£¨«ůĹ‚∑Ĺ≥Ő◊ťĶ√ĶĹ‘ī√‹∂»∑÷≤ľ£¨ĹÝ∂ÝŅ…«ůŃų≥°ńŕ»ő“‚Ķ„ĶńňŔ∂»°Ę—ĻѶĶ»őÔņŪŃŅ°£∆šŅō÷∆∑Ĺ≥Ő(ņ≠∆’ņ≠ňĻ∑Ĺ≥Ő)ő™£ļ
 (8)
(8)
ĪŖĹÁŐűľĢő™£ļ
 £¨‘ŕőÔ√ś…Ō (9)
£¨‘ŕőÔ√ś…Ō (9)
 £¨őř«Ó‘∂ī¶ (10)
£¨őř«Ó‘∂ī¶ (10)
∆š÷–£ļ ő™»Ň∂ĮňŔ∂» ∆£Ľnő™őÔ√ś…ŌĪŪ√śĶ•őĽ∑®ŌÚ łŃŅ£ĽVő™Ľ¨––ÕßĶń‘ň∂ĮňŔ∂»°£
ő™»Ň∂ĮňŔ∂» ∆£Ľnő™őÔ√ś…ŌĪŪ√śĶ•őĽ∑®ŌÚ łŃŅ£ĽVő™Ľ¨––ÕßĶń‘ň∂ĮňŔ∂»°£
”…ĽýĪĺŃųՌѶ—ß÷™ ∂Ņ…÷™łĹľ”÷ ŃŅ∂®“Śő™£ļ
 (11)
(11)
”…łĹľ”÷ ŃŅ∂®“Ś ĹŅ…“‘Ņī≥Ų£ļľ∆ň„łĹľ”÷ ŃŅĶńĻōľŁĺÕ «ľ∆ň„ ∆ļĮ ż°£ő™Ńňľ∆ň„łī‘”–ő◊īőÔŐŚ»∆Ńų£¨Īĺ—–ĺŅ≤…”√łŮļĮ ż∑®°£‘ŕĺŖŐŚĶń ż÷Ķ«ůĹ‚Ļż≥Ő÷–£¨”¶”√Hess-Smith∑Ĺ∑®ľ∆ň„»żő¨őÔŐŚĶń ∆Ńų°£ņŪŌŽŃųŐŚĶńőÔ√śĪŖĹÁŐűľĢŅ…“‘ĪŪ ĺő™£ļ
 (12)
(12)
∆š÷–£ļnx£¨nyļÕnz∑÷Īūő™ī¨≤įĪŪ√śĶńĶ•őĽÕ‚∑®ŌÚ łŃŅn‘ŕňśŐŚ◊ÝĪÍŌĶ÷–‘ŕx£¨yļÕz∑ĹŌÚ…ŌĶń3łŲ∑÷ŃŅ£Ľx£¨yļÕz∑÷Īūő™Ńų≥°÷–»ő“ĽĶ„ī¶Ķń łĺ∂rĶń3łŲ∑÷ŃŅ°£
łýĺ› ∆ŃųĶĢľ”‘≠ņŪľįŅňŌ£ĽŰ∑Ú∑Ĺ∑®£¨ňŔ∂» ∆ļĮ żŅ…”√ī¨≤į‘ň∂ĮňŔ∂»°ĘĹ«ňŔ∂»ľįĶ•őĽňŔ∂» ∆ļĮ żĪŪ ĺő™£ļ

 (13)
(13)
∆š÷–£ļ £¨
£¨ ļÕ
ļÕ ∑÷ĪūĪŪ ĺx£¨yļÕz∑ĹŌÚ∆Ĺ“∆‘ň∂ĮĶńĶ•őĽňŔ∂» ∆ļĮ ż£Ľ
∑÷ĪūĪŪ ĺx£¨yļÕz∑ĹŌÚ∆Ĺ“∆‘ň∂ĮĶńĶ•őĽňŔ∂» ∆ļĮ ż£Ľ £¨
£¨ ļÕ
ļÕ ∑÷ĪūĪŪ ĺx£¨yļÕz∑ĹŌÚ–ż◊™‘ň∂ĮĶńĶ•őĽňŔ∂» ∆ļĮ ż°£
∑÷ĪūĪŪ ĺx£¨yļÕz∑ĹŌÚ–ż◊™‘ň∂ĮĶńĶ•őĽňŔ∂» ∆ļĮ ż°£
Ĺę Ĺ(12)īķ»Ž Ĺ(11)÷–£¨Ņľ¬«ĶĹu£¨v£¨w£¨p£¨qļÕrĶń»ő“‚–‘£¨Ņ…“‘Ķ√ĶĹ£ļ
 (14)
(14)
…Ťī¨≤įĪŪ√śĪĽĽģ∑÷≥… łŲňńĪŖ–őĶ•‘™£¨‘Ú
łŲňńĪŖ–őĶ•‘™£¨‘Ú
 (15)
(15)
Ĺ÷–£ļ ő™ī¨≤įĹŲ”–ĶŕiłŲ∑÷ňŔ Ī£¨őÔ√śĶŕkłŲĶ•‘™…ŌĶńňŔ∂» ∆£Ľ
ő™ī¨≤įĹŲ”–ĶŕiłŲ∑÷ňŔ Ī£¨őÔ√śĶŕkłŲĶ•‘™…ŌĶńňŔ∂» ∆£Ľ ő™∑…ÕßĹŲ”–ĶŕjłŲ∑÷ňŔ Ī£¨őÔ√śĶŕkłŲĶ•‘™…ŌĶń∑®ŌÚ∑÷ňŔ£ĽSkő™ĶŕkłŲĶ•‘™Ķń√śĽż°£
ő™∑…ÕßĹŲ”–ĶŕjłŲ∑÷ňŔ Ī£¨őÔ√śĶŕkłŲĶ•‘™…ŌĶń∑®ŌÚ∑÷ňŔ£ĽSkő™ĶŕkłŲĶ•‘™Ķń√śĽż°£
«ůĹ‚…Ō ĹľīŅ…Ķ√Ķųž”÷ ŃŅ°£∆š ż÷Ķľ∆ň„Ļż≥Ő ő™£ļŐŠ≥ŲŃų≥°ő Ő‚°™»∑∂®Ľż∑÷∑Ĺ≥Ő°™ ż÷ĶņŽ…Ę°™Ķ•‘™∆Ĺ√śĽĮ°™”įŌžŌĶ żľ∆ň„°™Īŗ÷∆≥Ő–Úľ∆ň„ ∆ļĮ żļÕĪŪ√śňŔ∂»£¨«ů≥ŲłĹľ”÷ ŃŅĶń ż÷ĶĹ‚°£Īĺ—–ĺŅ÷–ĶńHess-Smith∑Ĺ∑® ĶŌ÷Ļż≥Ő»ÁŌ¬£ļ ◊Ō»£¨—°”√Solid Edge»ŪľĢ∂‘ĹŠĻĻőÔĹÝ––Ĺ®ń££¨»Ľļů£¨“‘ASCĘڳ٠Šš≥Ų÷–ľšőńľĢ£Ľ»Ľļů£¨ Ļ”√GAMBIT»ŪľĢ∂‘ĹŠĻĻőÔĹÝ––Ĺ®ń£ļÕÕÝłŮņŽ…Ę£¨ŐŠ»°…ķ≥…Ķń√śÕÝłŮőńľĢĹÝ––ī¶ņŪ£¨…ķ≥… ļŌľ∆ň„Ķń√ś‘™Õݳٳ٠ĹőńľĢ≤Ę š≥Ų“‘GENERICő™«ůĹ‚∆ųĶń*.neuÕÝłŮőńľĢ£¨Õݳټģ∑÷◊ųő™»ňő™“Úňō”įŌž◊ÓīůĶń≤Ņ∑÷ «÷ŃĻō÷ō“™Ķń“Ľ≤Ĺ£¨Īĺ—–ĺŅ≤…”√ĹŠĻĻÕÝłŮ∑Ĺ∑®∂‘őř»ňÕß ™ĪŪ√śĹÝ––Õݳټģ∑÷£¨’Ž∂‘≤ĽÕ¨«ķ¬ ĶńĪŪ√śŅ…—°‘Ů ĶĪĶńĶ•‘™ņŗ–ÕļÕŇŇŃ–∑Ĺ Ĺ£Ľ◊Óļů£¨ņŻ”√C”Ô—‘Īŗ÷∆≥Ő–Ú ĶŌ÷÷ĪĹ”∂Ń»°ĹŕĶ„–ŇŌĘļÕĶ•‘™–ŇŌĘ÷–ĶńĶ•‘™ĪŗļŇļÕĹŕĶ„ŇŇ–Ú£¨≤Ęłýĺ›√ś‘™Õݳٳ٠Šš≥ŲĶĹHess- SmithŅ… ∂ĪūĶńdatłŮ ĹőńĪĺőńľĢ£¨ņŻ”√Hess-Smith∑Ĺ∑®Īŗ÷∆≥Ő–Úľ∆ň„»żő¨őÔŐŚĶńłĹľ”÷ ŃŅ°£
2.2 Õ÷«Úň„ņż
◊Ō»ľ∆ň„»ő“‚“ĽÕ÷«ÚŐŚ(2a=20 m£¨2b=2c=5.33 m£¨ =1.225 kg/m3)ĶńłĹľ”÷ ŃŅ°£Īĺ—–ĺŅ÷ĪĹ”łÝ≥Ųľ∆ň„ĹŠĻŻ£¨≤ĘĹę∆š”ŽņŪ¬Ř÷Ķ[15]ĹÝ––ŃňĪ»ĹŌ(ľŻĪŪ1)£¨Ņ…“‘Ņī≥Ųľ∆ň„ĹŠĻŻ”ŽņŪ¬Ř÷Ķő«ļŌĶ√ļ‹ļ√£¨¶ňii(i=1,°§°§°§, 4)◊ÓīůŌŗ∂‘őů≤Óő™6.52%£¨¶ň55ļÕ¶ň66÷–£¨◊Ó–°Ōŗ∂‘őů≤ÓĹŲő™0.44%£¨ĪŪ√ųĪĺ—–ĺŅ”√”ŕľ∆ň„łĹľ”÷ ŃŅĶń∑Ĺ∑® «’ż»∑Ķń£¨≥Ő–Ú «Ņ…ŅŅĶń°£”…ľ∆ň„ĹŠĻŻŅ…“‘Ņī≥Ų£¨Hess-Smith∑Ĺ∑®ľ∆ň„ĶńĹŠĻŻňśÕÝłŮĶńĺęŌł∂Ýĺę◊ľ≤Ę«ųĹŁ’ś Ķ£¨»Ōő™5 000ÕÝłŮĺÕÕÍ»ęń‹ĻĽ¬ķ◊„ĺę∂»“™«ů°£
=1.225 kg/m3)ĶńłĹľ”÷ ŃŅ°£Īĺ—–ĺŅ÷ĪĹ”łÝ≥Ųľ∆ň„ĹŠĻŻ£¨≤ĘĹę∆š”ŽņŪ¬Ř÷Ķ[15]ĹÝ––ŃňĪ»ĹŌ(ľŻĪŪ1)£¨Ņ…“‘Ņī≥Ųľ∆ň„ĹŠĻŻ”ŽņŪ¬Ř÷Ķő«ļŌĶ√ļ‹ļ√£¨¶ňii(i=1,°§°§°§, 4)◊ÓīůŌŗ∂‘őů≤Óő™6.52%£¨¶ň55ļÕ¶ň66÷–£¨◊Ó–°Ōŗ∂‘őů≤ÓĹŲő™0.44%£¨ĪŪ√ųĪĺ—–ĺŅ”√”ŕľ∆ň„łĹľ”÷ ŃŅĶń∑Ĺ∑® «’ż»∑Ķń£¨≥Ő–Ú «Ņ…ŅŅĶń°£”…ľ∆ň„ĹŠĻŻŅ…“‘Ņī≥Ų£¨Hess-Smith∑Ĺ∑®ľ∆ň„ĶńĹŠĻŻňśÕÝłŮĶńĺęŌł∂Ýĺę◊ľ≤Ę«ųĹŁ’ś Ķ£¨»Ōő™5 000ÕÝłŮĺÕÕÍ»ęń‹ĻĽ¬ķ◊„ĺę∂»“™«ů°£
ĪŪ1 Õ÷«ÚŐŚłĹľ”÷ ŃŅĹŠĻŻĪ»ĹŌ
Table 1 Comparative results of ellipsoid added mass

2.3 ĺ≠—ťĻę Ĺľ∆ň„őř»ňÕ߳ž”÷ ŃŅ
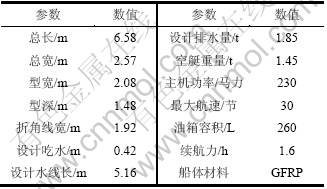
łýĺ›őńŌ◊[15]÷–Ķńĺ≠—ťĻę Ĺľ∆ň„ń≥–Õőř»ňÕßĶńłĹľ”÷ ŃŅ£¨ Ķī¨÷ų≥Ŗ∂»»ÁŌ¬ĪŪ2ňý ĺ£¨ľ∆ň„ĹŠĻŻľŻĪŪ3°£
Õľ2 őř»ňÕß»żő¨Ĺ®ń£
Fig.2 Three-dimensional model of USV
ĪŪ2 Ķī¨÷ų≥Ŗ∂»
Table 2 Main parameters of USV
ĪŪ3 ĺ≠—ťĻę Ĺľ∆ň„ĹŠĻŻ
Table 3 Results of empirical formula

2.4 Hess-Smith∑®ľ∆ň„őř»ňÕ߳ž”÷ ŃŅ
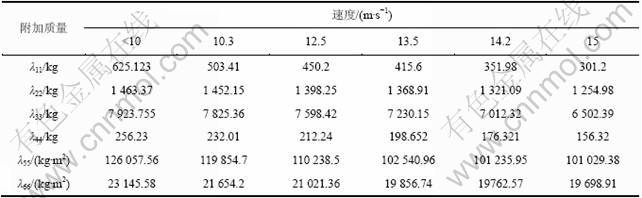
ĶĪ£ĺ3.0 Īī¨≤įī¶”༨––◊īŐ¨£¨ľīĶĪňŔ∂»īů”ŕ10 m/s Ī£¨Īĺőř»ňÕßŅ™ ľĽ¨––°£∂‘∆šĹÝ––ňű≥ŖĪ»ő™2.5Ķńń£–Õ ‘—ť£¨ł√ ‘—ť≤…”√◊‘”…ÕŌ“∑∑®≤‚ ‘Ńňī¨ń£◊ŤŃ¶°Ę…ż≥ŃļÕ◊›«„Ĺ«Ķ»≤ő ż£¨ī¨ń£ľŻÕľ3°£∆š÷–◊ŤŃ¶≤…”√ĶÁ≤‚∑®≤‚ŃŅ£¨◊›«„Ĺ«≤…”√«„Ĺ«īęł–∆ų≤‚ŃŅ£¨…ż≥Ń≤…”√…ż≥Ń“«≤‚ŃŅ≤‚Ķ√°£◊›«„Ĺ«ľį…ż≥ŃĶ»◊īŐ¨≤ő żĽĽň„ő™ Ķī¨ļů»ÁĪŪ4ňý ĺ°£

Õľ3 őř»ňÕßń£–ÕÕľ∆¨
Fig.3 Picture of the USV
łýĺ›Gambit»ŪľĢĽģ∑÷ňń√śŐŚĶ•‘™łŮ(Ķš–ÕÕݳټģ∑÷ľŻÕľ4ļÕÕľ5)£¨≤Ę š≥ŲĶ•‘™◊ÝĪÍ£¨ĹŕĶ„–ŇŌĘ∑÷ő™4Ń–£¨∆š÷–Ķŕ1Ń–ő™ĹŕĶ„ĪŗļŇ£¨ļů3Ń–ő™ĹŕĶ„◊ÝĪÍ°£Ķ•‘™–ŇŌĘįī’’Ķ•‘™ņŗ–Õ∑÷ő™6Ń–(»żĹ«–őĶ•‘™)ĽÚ7Ń–(ňńĪŖ–őĶ•‘™)£¨Ķŕ1Ń–ő™Ķ•‘™ĪŗļŇ£¨Ķŕ2ļÕĶŕ3Ń–ő™Ķ•‘™łŮ ĹňĶ√ų£¨ļůľłŃ–ő™ĹŕĶ„–ÚļŇĶńŇŇŃ–°£»Ľļů£¨łýĺ›Hess-Smith∑®Īŗ≥Őľ∆ň„ī¨≤įňŔ∂» ∆ľįłĹľ”÷ ŃŅ£¨∂Ń»ŽĶńÕݳٖŇŌĘĺ≠ĻżC”Ô—‘Īŗ÷∆≥Ő–Ú÷ō–¬∂Ń»°£¨√ś‘™–ŇŌĘő™ĹŕĶ„◊ÝĪÍĶ„£¨Ļ≤12Ń–°£ĶĪÕß‘ŕňģ÷– «£¨√‹∂»= 1 025.22 kg/m3£¨∆šÕßŐŚ»Žňģ≤ő ż»ÁĪŪ5ňý ĺ£¨ľ∆ň„ĹŠĻŻľŻĪŪ6°£
ĪŪ4 őř»ňÕßļĹ––◊›«„Ĺ«ľį…ż≥Ń
Table 4 Trim angle and draft of USV


Õľ4 ĶÕňŔ Īī¨ŐŚ»Žňģ–ő◊īľįÕݳټģ∑÷
Fig.4 Water entry shape and grid of USV at slow speed

Õľ5 łŖňŔ Īī¨ŐŚ»Žňģ–ő◊īľįÕݳټģ∑÷
Fig.5 Water entry shape and grid of USV at high speed
ĪŪ5 ÕßŐŚ»Žňģ≤ő ż
Table 5 Water entry parameters of USV

ĪŪ6 Hess-Smith∑Ĺ∑®ľ∆ň„ĹŠĻŻ
Table 6 Results of Hess-Smith method
3 ∑¬’ś Ķ—ťľį∂‘Ī»∑÷őŲ
őř»ňÕßļ£ ‘ ĶÕßļĹňŔ ‘—ťĹÝ––ň≥∑Á°Ęńś∑Á2īő£¨Õý∑Ķ≤‚ŃŅĺ°ŃŅĪ£≥÷Õ¨“ĽļĹŌŖ£¨≤‚ŃŅ∆ū÷ĻĶ„“≤”¶ĺ°ŃŅĪ£≥÷“Ľ÷¬°£≤‚ňŔ Ī£¨ļĹŌÚĪ£≥÷≤ĽĪš°£ļĹňŔ Ļ”√GPSĹÝ––≤‚ŃŅ£¨”…Õß…ŌőřŌŖĶÁĶ•‘™ľįį∂…ŌőřŌŖĶÁĶ•‘™īę š żĺ›£¨ĹÝ–– Ķ ĪľŗŅōľ«¬ľ°£ł√őř»ňÕßļ£ ‘Õľ∆¨»ÁÕľ6ňý ĺ°£
Õľ6 őř»ňÕß Ķī¨ļ£ ‘Õľ∆¨
Fig.6 Sea-experiment picture of USV
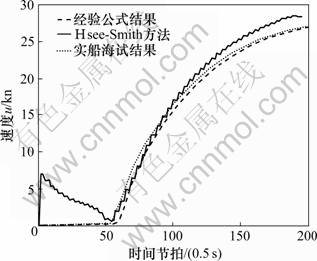
łýĺ›…Ōőń÷–Ķń6◊‘”…∂»∑Ĺ≥Ő£¨‘ň”√4Ĺ◊∂®≤Ĺ≥§ŃķłŮ-Ņ‚ňĢ(Rung-Kutta)∑®ĹÝ–– ż÷Ķ«ůĹ‚£¨ī”∂Ý«ůĶ√őř»ňÕß»ő“‚ ĪŅŐĶńľ”ňŔ∂»°£»Ľļů£¨∂‘ľ”ňŔ∂»ĹÝ–– ż÷ĶĽż∑÷£¨ĽŮĶ√»ő“‚ ĪŅŐĶńőĽ÷√ļÕňŔ∂»£¨ĹÝ∂Ý‘§Ī®∆š‘ň∂Į◊īŐ¨°£‘ŕ∆šňŻ≤ő żĪ£≥÷“Ľ÷¬£¨łÝ∂®Õ∆Ѷ(∑Ę∂ĮĽķ3 000 r/min)Ķń«ťŅŲŌ¬£¨∑÷Īū∑¬’ś2÷÷≤ĽÕ¨łĹľ”÷ ŃŅ«ťŅŲŌ¬Ķńőř»ňÕßľ”ňŔĻż≥Ő£¨ľ«¬ľ◊īŐ¨≤ő żuňś ĪľšĹŕŇńĶńĪšĽĮ£¨√Ņ0.5√Žľ«¬ľ1īő żĺ›“‘Ī£÷§ļÕ ĶÕßļ£ ‘ żĺ›ŌŗÕ¨ĹŕŇń°£∆šĺŖŐŚĪ»ĹŌĹŠĻŻľŻÕľ7°£
Õ®ĻżÕľ7÷–3÷÷ľ”ňŔĻż≥ŐĶń∂‘Ī»Ņ…“‘Ņī≥Ų£ļ‘ŕ≤ĽÕ¨ĶńłĹľ”÷ ŃŅ«ťŅŲŌ¬£¨Ķ√ĶĹĶń◊īŐ¨≤ő ż≤Ľ“Ľ—ý£¨łĹľ”÷ ŃŅ∂‘őř»ňÕßĶń‘ň∂Į◊īŐ¨”–“Ľ∂®”įŌž°£Ņľ¬«≤ĽÕ¨ļĹňŔŌ¬ĶńļĹ––◊īŐ¨ «Īō“™Ķń£¨∆š∑¬’śĹŠĻŻłŁľ”Ŕţ’ś Ķ«ťŅŲ°£
Õľ7 łĹľ”÷ ŃŅĹŠĻŻ∂‘Ī»
Fig.7 Comparison of accelerated motion of USV
4 ĹŠ¬Ř
(1) Õ®ĻżHess-Smith∑Ĺ∑®Īŗ–īĶń»żő¨őÔŐŚ‘ŕŃųŐŚ÷–ĶńłĹľ”÷ ŃŅľ∆ň„≥Ő–ÚŅ…ŅŅ°£
(2) łĹľ”÷ ŃŅ∂‘őř»ňÕßĶń‘ň∂Į◊īŐ¨”–“Ľ∂®”įŌž£¨”»∆š «Ľ¨––ÕßĶńłĹľ”÷ ŃŅľ∆ň„°£Ņľ¬«≤ĽÕ¨ļĹňŔ Ī»Žňģ–ő◊ī”–ňýĪšĽĮ «Īō“™Ķń£¨∆šĹŠĻŻĹŌĺ≠—ťĻę ĹłŁĹ”ĹŁ’ś Ķ«ťŅŲ°£
(3) ”…”ŕļ£…Ō Ķľ «ťŅŲłī‘”∂ŗĪš£¨∑ÁņňŃųĶń”įŌž «≤ĽŅ…Ī‹√‚Ķń£¨‘ŕĹÝ––∑¬’ś ĪļŲ¬‘Ńň’‚–©Õ‚Ѷ£¨Ņ…ń‹Ķľ÷¬‘ŕ”Ž Ķľ żĺ›÷ģľš”–ňý∆ę≤Ó°£
(4) Õ®ĻżHess-Smith∑Ĺ∑®ľ∆ň„Ľ¨––Õ߳ž”÷ ŃŅ Ī£¨ļŲ¬‘Ńňňģ…Ō≤Ņ∑÷≤ķ…ķĶńłĹľ”÷ ŃŅ£¨“≤Ņ…ń‹ ĻĶ√ľ∆ň„÷Ķ≤ķ…ķŃň“Ľ–©őů≤Ó°£
≤őŅľőńŌ◊£ļ
[1] US Department of the Navy. The Navy Unmanned Surface Vehicle (USV) Master Plan[R]. Washington D C: US Department of the Navy, 2007.
[2] –ž”Ů»Á, ň’”Ů√Ů, Ň””ņĹ‹. ļ£—ůŅ’ľš÷«ń‹őř»ň‘ň‘ō∆ųľľ ű∑Ę’Ļ’ĻÕŻ[J]. ÷–ĻķĹĘī¨—–ĺŅ, 2006, 1(3): 2-4.
XU Yu-ru, SU Yu-min, PANG Yong-jie. Expectation of the development in the technology on ocean space intelligent unmanned vehicles[J]. Chinese Journal of Ship Research, 2006, 1(3): 2-4.
[3] MANLEY J E. Autonomous surface vessels, 15 years of development[C]//Proceedings of the Oceans 2008 MTS/IEEE Quebec Conference and Exhibition. Quebec, 2008: 1-4.
[4] VEERS J, BERTRAM V. Development of the ASV multi- mission surface vehicle III[C]//Proceedings of 5th Int Conf Computer and IT Application in the Maritime Industries. COMPIT. Delft, 2006: 345-355.
[5] Caccia M, Bibuli M, Bono R, et al. Basic navigation, guidance and control of an unmanned surface vehicle[J]. Autonomous Robots, 2008, 25: 349-365.
[6] Xu T, Chudey J, Sutton R. Soft computing design of a multisensory data fusion system for unmanned surface vehicle navigation[C]//Proceedings of 7th IFAC Conference Maneuvering Control of Marine Craft. Lisbon, 2006: 124-156.
[7] Faltinsen O M. Hydrodynamics of high-speed marine vehicles [M]. New York: Cambridge University Press, 2005: 342-385.
[8] ¬Ūž«, Ķ•—©–Ř. ż÷Ķľ∆ň„łī‘”Õ‚–őőÔŐŚłĹľ”÷ ŃŅĶń–¬∑Ĺ∑®[J]. ľ∆ň„Ľķ∑¬’ś, 2007, 24(5): 75-78.
MA Ye, SHAN Xue-xiong. A new numerical computation method for added masses of complicated object[J]. Computer Simulation, 2007, 24(5): 75-78.
[9] –Ūő¨Ķ¬, Ń÷Ĺ®Ļķ. Ōł≥§Ľō◊™ŐŚłĹľ”÷ ŃŅĶń ż÷Ķľ∆ň„[J]. ňģ∂ĮѶ—ß—–ĺŅ”ŽĹÝ’Ļ, 1986, 1(2): 70-81.
XU Wei-de, LIN Jian-guo. Numerical calculation of added masses of slender bodies of revolution[J]. Journal of Hydrodynamics, 1986, 1(2): 70-81.
[10] ő‚ÕŻ“Ľ. ŃųՌѶ—ß[M]. ĪĪĺ©: ĪĪĺ©īů—ß≥Ųįś…Á, 2000: 154-166.
WU Wang-yi. Fluid Mechanics[M]. Beijing: Peking University Press, 2000: 154-166.
[11] ÷ž» īę, Ļýļ£«Ņ, Á—Ļķ∆Ĺ, Ķ». “Ľ÷÷Ľý”ŕCFD ņŪ¬Řī¨≤įłĹľ”÷ ŃŅ”Ž◊ŤńŠĶńľ∆ň„∑Ĺ∑®[J]. …Ōļ£ĹĽÕ®īů—ß—ßĪ®, 2009, 43(2): 198-203.
ZHU Ren-chuan, GUO Hai-qiang, MIAO Guo-ping, et al. A computational method for evaluation of added mass and damping of ship based on CFD theory[J]. Journal of Shanghai Jiaotong University, 2009, 43(2): 198-203.
[12] Chang H X, Miao G P, Liu Y Z. Numerical simulation of viscous flow around a rolling cylinder with ship like section[J]. China Ocean Engineering, 1995, 9 (1): 9-18.
[13] …Ř ņ√ų, Õű‘∆≤Ň. łŖňŔÕß∂ĮѶ—ß[M]. …Ōļ£: …Ōļ£ĹĽÕ®īů—ß≥Ųįś…Á, 1990: 1-5.
SHAO Shi-ming, WANG Yun-cai. Hydrodynamics of high-speed vehicles[M]. Shanghai: Shanghai Jiaotong University Press, 1990: 1-5.
[14] Hess J L, Smith A M O. Calculation of potential flow about arbitrary bodies[J]. Progress in Aeronautical Science, 1967, (8): 1-133.
[15] Õű–°ńĢ, ¬ĹőńņŪ. Ľ¨––Õß∂Įő»–‘[J]. ĻķÕ‚ĹĘī¨Ļ§≥Ő, 1998, 231: 11-18.
WANG Xiao-ning, LU Wen-li. Dynamic stability of planning vessels[J]. Ship Engineering Abroad, 1998, 231: 11-18.
(Īŗľ≠ ļő‘ňĪů)
’łŚ»’∆ŕ£ļ2011-04-15£Ľ–řĽō»’∆ŕ£ļ2011-06-15
ĽýĹūŌÓńŅ£ļňģŌ¬÷«ń‹Ľķ∆ų»ňľľ űĻķ∑ņŅ∆ľľ÷ōĶ„ Ķ—ť “Ņ™∑ŇŅőŐ‚—–ĺŅĽýĹū◊ ÷ķŌÓńŅ(2008003)£ĽĻķľ“◊‘»ĽŅ∆—߼ýĹū◊ ÷ķŌÓńŅ(61004008)
Õ®–Ň◊ų’Ŗ£ļňÔļģĪý(1985-)£¨Ňģ£¨ļŕŃķĹ≠őŚ≥£»ň£¨≤© Ņ—–ĺŅ…ķ£¨ī” ¬őř»ňňģ√śÕßĶńňģ∂ĮѶľ∆ň„ľį≤Ŕ◊›‘ň∂Į∑ĹŌÚ—–ĺŅ£ĽĶÁĽį£ļ13796629437£ĽE-mail: sun-han-bing@163.com

