PMSM混沌系统的自适应反步控制
陈宁,熊丝琦,刘波,桂卫华
(中南大学 信息科学与工程学院,湖南 长沙,410083)
摘要:基于永磁同步电机的混沌模型,当系统中含有不确定性参数时,设计一种自适应反步控制器,使系统从混沌状态中恢复过来,渐进跟踪期望速度并保持稳定。首先,对给定的期望转速和期望直轴电流,构造误差系统,用反步法设计子系统的控制器,在每个子系统中构造Lyapunov函数和虚拟控制量,获得使系统渐进稳定的期望的交轴电流的期望值。然后,当永磁同步电机混沌系统中的2个未知参数负载转矩和永磁磁通变化时,根据Lyapunov稳定性原理,用反步法设计出负载转矩和永磁磁通的自适应控制器,实现永磁同步电机混沌系统对速度的跟踪以及参数的一致收敛。数值仿真结果表明:所设计的自适应控制器是有效的,能使受控系统从混沌状态变成可控状态,并快速的跟踪期望速度,同时未知参数的估计值收敛达到了实际值。
关键词:永磁同步电机;混沌;反步法;自适应律
中图分类号:TM301.2 文献标志码:A 文章编号:1672-7207(2014)01-0099-06
Adaptive backstepping control of permanent magnet synchronous motor chaotic system
CHEN Ning, XIONG Siqi, LIU Bo, GUI Weihua
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: A new type of adaptive backstepping controller was designed for the permanent magnet synchronous motor chaotic model with uncertain parameters when the system was in a chaotic state, allowing the system to recover from the chaos, keep asymptotic tracking of the desired speed and be stable. First, for a given expected speed and a direct axis current, error system was constructed. The controller of each subsystem was designed by backstepping method. The Lyapunov function and virtual control quantity was structured to obtain the expected quadrature axis current which made PMSM system asymptotically stable in each subsystem. Then, when load torque was unknown and permanent magnet flux changed in the PMSM chaos system, the load torque, and permanent magnet flux adaptive control law were designed by Lyapunov stability theorem. Next, the adaptive controller of unknown PMSM system was obtained to realize the asymptotic tracking of the speed reference and keep the uniform convergent to unknown parameters. Numerical simulation results show that the adaptive controller is valid. The controlled system can quickly track the desired speed and keep it stable, and estimation of unknown parameter has achieved the practical value.
Key words: permanent magnet synchronous motor; chaos; backstepping; adaptive law
永磁同步电动机(PMSM)在一定条件下将呈现出混沌特性, 主要表现为转矩和转速的间歇振荡、控制性能的不稳定、系统不规则的电流噪声等[1-2]。这对于永磁同步电动机稳定运行极为不利,甚至将引入整个驱动系统的损坏,因此,永磁同步电动机的混沌控制研究具有很大的实际意义。当PMSM发生混沌导致电机系统失稳时,控制器的设计目标是使电机从混沌状态中恢复过来,并稳定在期望的转速上。许多学者对PMSM混沌系统的控制方法进行了研究。谭文等[3]采用一种滑模变结构控制方法将系统混沌状态调整到吸引子域中平衡点,实现了对PMSM的混沌控制。但是,滑模变结构控制在物理实现时会存在高频抖动,会恶化PMSM系统的性能,也会造成机械装置的摩擦。韦笃取等[4]基于微分几何控制理论推导出PMSM混沌运动系统的状态反馈准确线性化控制律,然后利用其对PMSM中的混沌运动进行控制,但是微分几何方法存在病态问题。任海鹏等[5]利用状态延迟反馈研究了PMSM中的混沌控制,但该方法很难确定控制的周期目标轨道与延迟时间的关系,且不容易控制到预知的轨道。反步法[6]是最流行的非线性控制设计的方法之一,其基本思想是将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统设Lyapunov函数和中间虚拟控制量,一直“后退”到整个系统,将它们加以集成完成整个控制律的设计,最后实现系统的全局调节或跟踪,使系统达到预期的性能指标。文献[7-9]分别对Liu混沌系统、非线性机电混沌系统和不确定时滞混沌系统进行研究,采用反步自适应控制方法对上述系统进行控制,实现了混沌系统在含有未知扰动下的跟踪及混沌控制。Vaidyanathan等[10]采用反步控制方法研究Chen-Lee系统的同步。但这些文献都没有针对PMSM混沌系统。李钟慎等[11]采用反步法对PMSM的混沌运动进行控制,但没有考虑系统受到参数扰动或是外部不确定性因素的情况,且提出的控制器无法跟踪期望速度、电流。在实际PMSM系统中,系统参数总存在一定程度的不确定性,而混沌系统具有参数极端敏感性,参数的微小变化就会导致系统动态行为的巨大变化。自适应控制技术通过设计适当的自适应律来辨识电机参数,并补偿参数与负载变化带来的不确定性[12-14]。本文作者基于PMSM混沌系统的数学模型,设计了一种自适应反步控制器,实现了对PMSM混沌系统的控制、速度和电流的跟踪和对未知参数的辨识。推导说明用反步法设计出的控制器能使PMSM迅速脱离混沌态,达到期望转速,并按期望转速稳定运行,而且设计的参数自适应律也能完成对系统未知参数的识别。最后,用数值仿真证明了该方法的可行性和有效性。
1 问题描述
对于表贴式的PMSM,它基于同步旋转转子坐标的 模型为
模型为
 (1)
(1)
其中:状态变量 和
和 分别为PMSM定子d和q轴电流分量;
分别为PMSM定子d和q轴电流分量; 为转子角速度;ud和uq分别为定子d和q轴电压;Ld和Lq分别为定子d和q轴方向的电感;
为转子角速度;ud和uq分别为定子d和q轴电压;Ld和Lq分别为定子d和q轴方向的电感; 为转子永磁体产生的磁链;R为定子绕组的电枢电阻;J,
为转子永磁体产生的磁链;R为定子绕组的电枢电阻;J, 和B分别为转动惯量、负载转矩和摩擦因数;np为电机极对数。
和B分别为转动惯量、负载转矩和摩擦因数;np为电机极对数。
由式(1)可知:永磁同步电机模型是一个多变量、非线性、强耦合的状态方程组。为了分析PMSM的混沌特性,先通过一些变换将其电机数学模型转变成混沌模型。
选择仿射变换 时标变换
时标变换 ,其中
,其中
 ,
, ,
, ,
,
 ,
, ,
, (2)
(2)
那么系统(1)可以表示为
 (3)
(3)
其中:
 ;
; ;
; ;
;
 ;
; ;
; 。
。
本文主要讨论气隙均匀的表贴式PMSM,即 ,为便于表示,忽略式(3)中各变量的上标“~”,式(3)模型方程可转化为如下形式:
,为便于表示,忽略式(3)中各变量的上标“~”,式(3)模型方程可转化为如下形式:
 (4)
(4)
本文的设计目标是:针对PMSM系统(4),参数 和
和 未知,令参数和的估计值分别为
未知,令参数和的估计值分别为 和
和 。假设系统最初处于混沌状态,设计控制器ud,uq和参数的自适应律,使PMSM系统(4)脱离混沌态,稳定运行在给定的转速、电流上,并准确估计未知参数。
。假设系统最初处于混沌状态,设计控制器ud,uq和参数的自适应律,使PMSM系统(4)脱离混沌态,稳定运行在给定的转速、电流上,并准确估计未知参数。
2 PMSM混沌系统自适应反步控制
当PMSM系统处于混沌状态时,控制器的设计目标是使电机从混沌状态中恢复过来,并处于稳定状态。针对PMSM混沌模型的未知参数及参数的变化,结合自适应控制,采用如下自适应反步法设计控制器,以达到转速、电流的渐进跟踪,使系统稳定。下面给出本文的主要定理。
定理1 若设计的自适应反步混沌控制器为式(5)和参数自适应律为式(6),则可使得PMSM系统(4)脱离混沌态,达到转速、电流的渐进跟踪,保证系统的全局一致渐进稳定。自适应律的调节可以使得参数估计一致收敛。
 (5)
(5)
 (6)
(6)
其中:c1,c2,c3和c4为控制增益,c1>0,c2>0,c3>0,c4>0;n1,n2为自适应增益,n1>0,n2>0。
证明:对系统(4)进行自适应的反步设计。反步设计过程分为三步,在每一步中构造一个V函数,使每一个状态分量具有适当的渐进性。
对于PMSM混沌数学模型(4),设 ,
, ,
, 分别为期望d轴电流、期望q轴电流、期望转速,为了实现PMSM的完全解耦,使之达到直流机的控制性能,通常期望d轴电流为零,即=0,由于参数定义和未知,所以只能采用和的估计值和,其偏差分别为
分别为期望d轴电流、期望q轴电流、期望转速,为了实现PMSM的完全解耦,使之达到直流机的控制性能,通常期望d轴电流为零,即=0,由于参数定义和未知,所以只能采用和的估计值和,其偏差分别为 和
和 ,则有
,则有
 ,
, ,
, ,
, 。
。
定义速度跟踪误差
 (7)
(7)
定义q轴电流跟踪误差
 (8)
(8)
定义d轴电流跟踪误差
 (9)
(9)
其中: 为使
为使 渐进稳定的虚拟控制量[15];
渐进稳定的虚拟控制量[15]; 为使
为使 渐进稳定的虚拟控制量;和待定。
渐进稳定的虚拟控制量;和待定。
第1步:对式(7)求导并结合式(4)得:

 (10)
(10)
为了使速度跟踪误差等于0,令iq为虚拟控制函数。对于子系统(10)构造如下Lyapunov函数:
 (11)
(11)
则可得
 (12)
(12)
取
 (13)
(13)
则
 (14)
(14)
在第2步中将会消去 项,由式(10)和式(13)可得:
项,由式(10)和式(13)可得:
 (15)
(15)
第2步:对e2求导,可得:

 (16)
(16)
式中:取 ,c2>0。则
,c2>0。则


 (17)
(17)
定义如下Lyapunov函数:
 (18)
(18)
对V2求时间导数,可得:


 (19)
(19)
为了使式(19)满足 <0,取
<0,取
 (20)
(20)
在第3步中,将消去(19)中的 项。
项。
第3步;对e3求导得:


 (21)
(21)
定义如下Lyapunov函数:
 (22)
(22)
对V3求时间导数,可得:



 (23)
(23)
取

 (24)
(24)
则
 (25)
(25)
显然, 负定。
负定。
由以上理论推导可知
 (26)
(26)
使得V3≥0, <0成立并且只有当
<0成立并且只有当 时,V=0。即系统在其平衡点(0, 0, 0, 0, 0)处全局渐进稳定。
时,V=0。即系统在其平衡点(0, 0, 0, 0, 0)处全局渐进稳定。
可见:在输入控制量ud,uq作用下,PMSM可以从混沌状态脱离出来,实现速度和电流的跟踪,并保持在稳定态。
由此,通过上述设计的自适应反步混沌控制器ud和uq以及自适应律 和
和 ,使得PMSM混沌控制系统脱离混沌态,达到转速、电流的渐进跟踪,保证系统的全局一致渐进稳定。自适应律的调节可以使得参数估计一致收敛。
,使得PMSM混沌控制系统脱离混沌态,达到转速、电流的渐进跟踪,保证系统的全局一致渐进稳定。自适应律的调节可以使得参数估计一致收敛。
3 数值仿真
当PMSM系统(4)的参数满足一定条件时[16-18],系统处于混沌状态。对于系统(4)给出如下参数:Ld=Lq=14.25 mH;=0.031 N・m/A;J=4.7×10-5 kg・m2;B=0.016 2 N/(rad・s-1);R1=0.9Ω;np=1即σ=5.46,图1给出了σ=5.46,γ=30,ud=τL=1,uq=3,
 时PMSM的混沌吸引子。
时PMSM的混沌吸引子。
采用自适应反步混沌控制器(5)和参数自适应律(6),取仿真采样步长为0.1 s,取系统参数 ,初始条件
,初始条件  ,
,  ,
,  控制增益取值为c1=0.5,c2=0.5,c3=1,c4=1,n 1=0.5,n2=1,在时t=5 s,将控制输入ud,uq加入混沌进行数值仿真。图2所示为受控PMSM系统在t=5 s时迅速脱离混沌态,达到期望转速,并按期望转速稳定运行;图3所示为参数估计
控制增益取值为c1=0.5,c2=0.5,c3=1,c4=1,n 1=0.5,n2=1,在时t=5 s,将控制输入ud,uq加入混沌进行数值仿真。图2所示为受控PMSM系统在t=5 s时迅速脱离混沌态,达到期望转速,并按期望转速稳定运行;图3所示为参数估计 和
和 曲线,参数的估计值是收敛的且最终收敛到真实值;图4所示为受控系统跟踪误差e1,e2和e3曲线,受控系统跟踪误差衰减到0。
曲线,参数的估计值是收敛的且最终收敛到真实值;图4所示为受控系统跟踪误差e1,e2和e3曲线,受控系统跟踪误差衰减到0。

图1 PMSM混沌吸引子
Fig. 1 Chaotic Attractor of PMSM
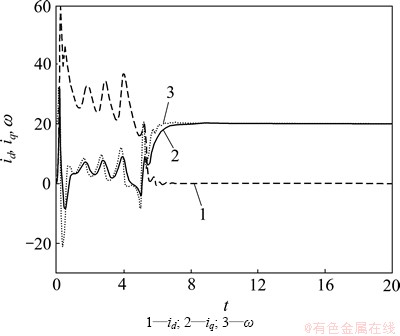
图2 受控系统状态变ω,id和iq响应曲线
Fig. 2 Curves of states ω,id and iq of PMSM system
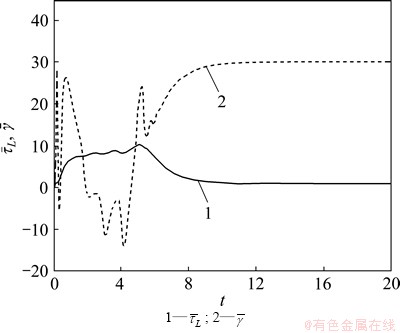
图3 参数估计 和
和 曲线
曲线
Fig. 3 Curves of parameters estimationand
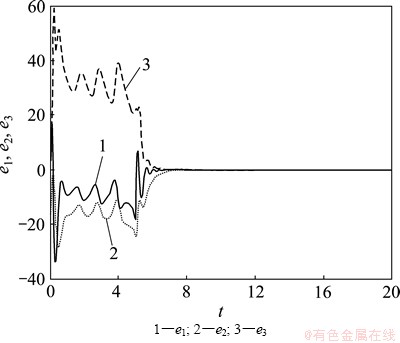
图4 受控系统跟踪误差e1,e2和e3曲线
Fig. 4 Curves of tracking error e1, e2 and e3 of PMSM system
4 结论
(1) 设计了一种自适应反步法设计控制器,实现了对含有不确定参数的PMSM混沌系统的控制、速度和电流的跟踪和对未知参数的辨识。
(2) 所用的方法设计简单,便于工程实现;另外考虑在高精度的伺服系统中,参数的变化对系统影响很大,引入自适应于反步控制相结合的策略,使系统能够根据参数的变化自行调整,以保证系统稳定。
参考文献:
[1] 张波, 李忠, 毛宗源, 等. 电机传动系统不规则运动和混沌现象初探[J]. 中国电机工程学报, 2001, 21(7): 40-45.
ZHANG Bo, LI Zhong, MAO Zongyun, et al. A primary study on an erratic behavior and chaotic phenomena of electric machine drive systems[J]. Proceedings of the CSEE, 2001, 21(7): 40-45.
[2] WEI Duqu, LUO Xiaoshu, WANG Binghong, et al. Robust adaptive dynamic surface control of chaos in permanent magnet synchronous motor[J]. Physics Letters A, 2007, 363(1): 71-77.
[3] 谭文, 王耀南, 黄创霞, 等. 永磁同步电机中混沌现象的滑模变结构控制[J]. 计算机工程与应用, 2009, 45(11): 220-222.
TAN Wen, WANG Yaonan, HUANG Chuangxia, et al. Sliding mode variable structure control of chaos in permanent magnet synchronous motor[J]. Computer Engineering and Applications, 2009, 45(11): 220-222.
[4] 韦笃取, 罗晓曙, 方锦清, 等. 基于微分几何方法的永磁同步电动机的混沌运动的控制[J]. 物理学报, 2006, 55(1): 54-59.
WEI Duqu, LUO Xiaoshu, FANG Jinqing, et al. Controlling chaos in permanent magnet synchronous motor based on the differential geometry method[J]. Acta Physica Sinica, 2006, 55(1): 54-59.
[5] 任海鹏, 刘丁, 李洁. 永磁同步电动机中混沌运动的延迟反馈控制[J]. 中国电机工程学报, 2003, 23(6): 175-178.
REN Haipeng, LIU Ding, LI Jie. Delay feedback control of chaos in permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2003, 23(6): 175-178.
[6] KE Shunsheng, LIN Jungshan. Sensorless speed tracking control with backstepping design scheme for permanent synchronous motors[C]// Proceedings of the 2005 IEEE Conference on Control Applications. Toronto, Canada: IEEE Press, 2005: 487-492.
[7] 黄良玉, 韦以明, 陈凤祥, 等. 含参数扰动Liu混沌系统的反步设计自适应控制[J]. 广西大学学报, 2010, 35(6): 1057-1062.
HUANG Liangyu, WEI Yiming, CHEN Fengxiang, et al. Adaptive control of parameters perturbation Liu chaotic system by using backstepping technique[J]. Journal of Guangxi University, 2010, 35(6): 1057-1062.
[8] 惠小健, 王震, 孙卫. 一类非线性机电混沌系统的自适应反步控制[J]. 科技通报, 2012,28(2): 20-22.
HUI Xiaojian, WANG Zhen, SUN Wei. Adaptive backstepping control of a nonlinear electro mechanical chaotic system[J]. Bulletin of Science and Technology, 2012,28(2): 20-22.
[9] Etedali N, Karimaghaee P. Adaptive control for a class of uncertain time delay chaotic systems with unknown control direction[C]// 20th IranianConferenceonElectricalEngineering. Tehran, Iran, 2012: 1012-1017.
[10] Vaidyanathan S, Rasappan S. Global chaos synchronization of Chen-Lee systems via backstepping control[C]// IEEE Conference on Advances in Engineering, Science and Management. Tami Nadu, India, 2012: 73-77.
[11] 李钟慎, 魏剑林, 王永初. 利用Backstepping方法的PMSM混沌运动的控制[J]. 华侨大学学报, 2009, 30(3): 253-256.
LI Zhongshen, WEI Jianlin, WANG Yongchu. Backstepping based chaotic control for permanent-magnet synchronous motor[J]. Journal of Huaqiao University, 2009, 30(3): 253-256.
[12] 彭继慎, 王强, 刘栋良, 等. 永磁同步电动机的速度自适应反推控制[J]. 煤炭学报, 2006, 31(4): 540-544.
PENG Jishen, WANG Qiang, LIU Dongliang, et al. The auto-adapted backstepping control of the speed of permanent magnet synchronous motor[J]. Journal of China Coal Society, 2006, 31(4): 540-544.
[13] 胡建辉, 邹继斌. 具有不确定参数永磁同步电动机的自适应反步控制[J]. 控制与决策, 2006, 21(11): 1264-1269.
HU Jianhui, ZOU Jibin. Adaptive backstepping control of permanent magnet synchronous motors with parameter uncertainties[J]. Control and Decision, 2006, 21(11): 1264-1269.
[14] ZHOU Jianguo, WANG Youyi. Real-time nonlinear adaptive backstepping speed control for a PM synchronous motor[J]. Control Engineering Practice, 2005, 13: 1259-1269.
[15] 张化光, 王志良, 黄伟. 混沌系统的控制理论[M]. 沈阳: 东北大学出版社, 2003: 145-153.
ZHANG Huaguang, WANG Zhiliang, HUANG Wei. Theory control of chaotic system[M]. Shenyang: Northeastern University Press, 2003: 145-153.
[16] 张卓, 李忠, 任平. 永磁同步电动机中的混沌现象[J]. 模糊系统与数学, 2001, 15(2): 102-106.
ZHANG Zhuo, LI Zhong, REN Ping. Chaotic phenomena in permanent magnet synchronous motors[J]. Fuzzy Systems and Mathematics, 2001, 5(2): 102-106.
[17] Park J B, Joo Y H, Zhang B, et al. Bifurcation and chaos in permanent magnet synchronous motors[J]. IEEE Trans Circ Syst I, 2002, 49(3): 383-387.
[18] 张兴华, 梅磊, 王德明. 永磁同步电机的混沌分析与跟踪[J]. 控制工程, 2011,18(5): 796-798.
ZHANG Xinghua, MEI Lei, WANG Deming. Chaos analysis and tracking control of permanent magnet synchronous motors[J]. Control Engineering of China, 2011,18(5): 796-798.
(编辑 杨幼平)
收稿日期:2012-12-16;修回日期:2013-03-08
基金项目:国家自然科学基金资助项目(61074001);广东省省部产学研结合专项资金资助项目(2011A090200097);湖南省科技计划项目(2013GK3009)
通信作者:陈宁(1970-),女,湖南长沙人,教授,博士生导师,从事关联系统分散控制、电机驱动控制系统研究;电话:13875915950;E-mail: ningchen@csu.edu.cn

