DOI�� 10.11817/j.issn.1672-7207.2019.12.010
�������Ʋ����Ը��ٳ�������ĥ�ĵ�Ӱ��
��Ӣ��,�źϼ�,�չ�Ȩ,�����
�����Ͻ�ͨ��ѧ ǣ�����������ص�ʵ���ң��Ĵ� �ɶ��� 610031��
ժҪ:��ϳ���ϵͳ����ѧģ�ͣ����������ƶ���ѹ�����������Եĸ��ٳ����ƶ���������ģ�ͣ��о��ƶ������з��������Գ���ĥ�ĵ�Ӱ�졣�о�����������ڵ���������½����ƶ������ٶȷ����们�ʷ���ͬ����ʱ������ĥ�Ļ������ٶȵĽ�С�����������们����ֵ������������ֲ��䣬����ĥ�IJ���ʱ����Ӧ���们����ֵ�����ٶȵļ�С���������ڳ���ĥ�ı��ֲ�����们����ֵ�ɲ���������ʽ�����Ż���ơ�
�ؼ���:���ٳ������������ƣ��们����ֵ��ĥ��ָ���������
��ͼ�����:U211.13 ���ױ�־��:A ���±��:1672-7207��2019��12-3007-08
Effect of anti-skid control parameters on wheel wear of high speed vehicle
JIANG��Yingjie, ZHANG��Heji, TAO��Gongquan, WEN��Zefeng
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
Abstract: Based on vehicle system dynamics model, a high-speed vehicle brake anti-skid control model with the nonlinear characteristics of brake cylinder pressure was established to study the effect of anti-skid control parameters on wheel wear. The results show that in the case of emergency braking with low adhesion, when the deceleration method and the creep rate method are combined to anti-skid, the wheel wear gradually increases as the speed decreases, and increases first and then remains constant as the creep rate threshold increases. The creep rate threshold corresponding to the remained wear increases as the speed decreases. It is recommended that the creep rate threshold can be optimized in other ways after the wheel wear remains constant.
Key words: high-speed vehicle; anti-skid control; creep rate threshold; wear index; adhesion force
�����г���Ҫ���õ��ƶ����ܡ��г��ձ���õ��ƶ���ʽΪ����ƶ��������ƶ��������ֹ���������������(��ѩ��������Ⱦ�������)�ᵼ�³��ַ������С����ֻ��л���ɳ���̤�����[1]�����ĥ���ӳ��г����ƶ����룬����ʱ��Ӱ���г���ȫ������������������Է������ƽ����˴����о�����������[2]���û�ģ��ṹ������������ֵ�������ϵķ�ʽ���з������ƣ��о������÷����ܹ���Ч��ʹ����Բ�ܷ�������������������ֵ������ZUO��[3]����DHSPlus������������ģ�ͣ������˲�ͬ���������Ʋ��Ե����ܣ������·�г����˶�ѧ���Ժ�������ģ�ͣ�ʵ����ϵͳ���棬�õ��˷�������ϵͳ���Ż���Ʋ������ֳ����顣�ӷ���Ч���������ֳ������й۲쵽�ķ����ƶ�������ʾ���Ż���Ƶ���Խ�ԡ��źϼ�[4]����Simpack��Simulink���Ϸ���ʵ���˳����ƶ��������ƣ��о������������ƶ�������������ɳ����ٶȵIJ��������Ҽ��ٶ���ֵ��ѡȡ���ֹ�������õ�Ӱ��ϴ�Τ�[5]��������ſ������ۺ��������ݣ�������Խ��ͼ��ٶȼ�������ȡ����̻��м��������ʱ������ӻ��лָ�������������Ϊ���ķ������Ʒ������Ż���ķ�����������Ч��߳�����������µ��������ˮƽ�������ƶ����롣ZHANG��[6]ͨ���ƶ�բ������ij���̤��ĥ����ֹ�ĥ��֮��ľ�����ϵ̽���˵����ƶ�բ�߶�̤���쳣ĥ�ĵ�Ӱ�죬���������բ��Ӳ�ȶ�̤��ĥ��Ӱ��ϴ���բ�ߺ��쳣ĥ����ʧ��TIAN��[7-8]�����˻���PI�们���ƵĻ���ǣ����������ģ�ͺ�ĥ�Ŀ��������о����ڵ���������²�ͬ�ٶȺ��们����ֵ�Գ���ĥ�ĵ�Ӱ�죬���������ƺ��ʵ��们����ֵ�ܹ���Ч�ر��ָ�ǣ����ͬʱ���ٳ���ĥ�ġ�Ŀǰ�����ƶ������Ķ����о�������Ѱ�����ϵ����ֵ��Ϊ�����Գ���ĥ�Ĺ�ע���٣�δ��ֿ����Գ���ĥ��Ϊ��������֮һ�ķ�����ֵ�Ż�ѡȡ�����ڴˣ��������߽������г������ƶ���������ģ�ͣ��о����������Ը��ٳ�������ĥ�ĵ�Ӱ�죬Ϊ�����ۺ��Ż�����ṩ�ο���
1 ���ٳ�������ѧģ��
��ij���ٳ����ڴ����������ƶ��µķ���Ϊ�о�����Ϊ��ģ����ƶ����̣����ö��嶯��ѧ��������Simpack��������������ѧģ�ͣ���ͼ1��ʾ��ģ�Ͱ���1�����塢2��������2�����ܡ�4���ֶԺ�8������Ȳ���������������Ϊ���塣������֮����õ���-���ᵥԪ���ӣ����ҿ�����һϵ���������������ֹ���������м������Ͷ�ϵ���������������Ԫ���ķ��������ԡ�
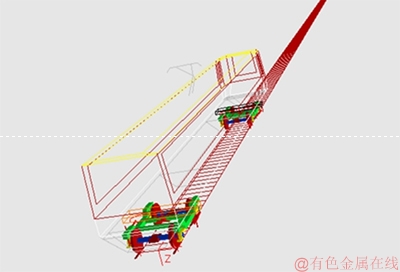
ͼ1����������ѧģ��
Fig. 1��Vehicle dynamics model
�ֹ취��Ӵ�ģ�Ͳ��ú��ȵ��ԽӴ�ģ�͡��ֹ�����ģ��һ������²���Kalker�����们���ۣ���������Ե��dz����������ִ��们���������Բ������ܸ�ȷ������们״̬�ֹ��们���Ե�Polachģ��[9]����������Ӧ��FΪ
 (1)
(1)
 (2)
(2)
ʽ�У�QΪ�ֹ취���غɣ���ΪĦ��������CΪ�Ӵ����иնȱ���ϵ��������Kalker���������Ƶ��õ���a��b�ֱ�Ϊ��Բ�Ӵ��߳��̰��᳤�ȣ�sΪ���们�� ������sx��sy�ֱ�Ϊ����ͺ����们��
������sx��sy�ֱ�Ϊ����ͺ����们�� (i=x,y)��vcΪ�����ٶȣ���iΪ����ͺ����ٶȡ�
(i=x,y)��vcΪ�����ٶȣ���iΪ����ͺ����ٶȡ�
����ͺ�����Fx��FyΪ
 ��(3)
��(3)
ʽ�У�i=x��y��
��Polachģ���в������滬���ٶȵı仯���仯��Ħ��������
 (4)
(4)
ʽ�У���0Ϊ����ʱĦ��������BΪĦ����������ָ����AΪ�����ٶ������ʱ��Ħ����������������ʱ��Ħ��������0֮�ȡ�
�ڴ��们�����£����벻ͬ����kA��kS��ʽ(1)���������ã�
 (5)
(5)
2 �����ƶ���������ģ��
�г����ƶ�ʱ������������ϲ�Ĺ���ʱ���ƶ����ᳬ���ֹ�����������³���ת���ٶȼ����½�������ʱ�������ڹ��Ժܴ��ٶȽ��ͺ�С�����ֳ��ֻ��С���������ϵͳ�����к���Ҫͨ�����Ʒ����������ƶ���ѹ����������
2.1�������ƶ�ϵͳ��ģ
�����ƶ�ϵͳ�Ƿdz���Ҫ�Ļ����ƶ�װ�ã������ƶ���ʩ�ӻ�ʩ��ʱ�������ƶ�װ�ñ��뱣֤�г��ڹ涨�ľ�����ͣ��������˿����ƶ�ģ�͵�ȷ����Ϊ��Ҫ��Ϊ�˼����⣬����о������ƶ���ѹ�����ƿ�������ģ�ͻ�һ����ʱģ�ͣ�������ȷģ���ƶ���ѹ���ķ��������ԡ���ˣ����IJ���������[10-11]�еĽ�ģ�������ٶ������п������������岢���¶Ⱥ㶨�����Ի����˶�ʱ������������������������Ϊ�㶨��Դ�������ݻ����ȳ�����ģ�ͣ�����������[12]��Ϊ
 (6)
(6)
ʽ�У�pΪ����ѹ����V0Ϊ���׳�ʼ�ݻ���kΪ����ָ����RΪ���峣����TΪ�����¶ȣ�mΪ����������uΪ�����ź����룬��u=1���ƶ�����ѹ����u=0���ƶ��ױ�ѹ����u=-1���ƶ����ŷ硣
��ʽ(6)�ɼ���������ѹ��ȡ����������������Ŀ����������ٶ������������Ʒ�Ϊһά������������ɲ���Sanville������ʽ[13]��
�����׳���ʱ����0��p/pin��0.528����
 (7)
(7)
��0.528
in��1����
 (8)
(8)
����������ʱ��0��p0/p��0.528����
 (9)
(9)
��0.528��p0/p��1����
 (10)
(10)
ʽ�У�asΪ�ƶ��ܽ������pinΪ���׳���ѹ����p0Ϊ������ѹ��
������Ҫ�о��Ĺ�������Ϊ�����ƶ����ڴ����������ƶ�����µ��ƶ���ѹ���ֶ���ƣ����ٶ�Ϊ300~350 km/hʱ���ƶ��ױ���ѹ��Ϊ200 kPa�����ٶ�Ϊ0~300 km/hʱ���ƶ��ױ���ѹ��Ϊ325 kPa�����ŷ�����ͼ2��ʾ���ƶ���ѹ������200 kPa��325 kPa�ij��ʱ��ֱ�Ϊ1.26 s��1.38 s��
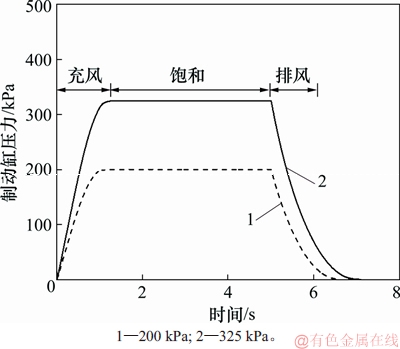
ͼ2���ƶ��׳��ŷ�ѹ��
Fig. 2��Pressure of brake cylinder inflatable and exhaust
�ƶ����ṩ�Ŀ���ѹ���������ƶ������ϣ�ʹ�����˲����������ɻ�������װ�÷Ŵ�ݸ�բƬ������բƬ�������ƶ��̵�ѹ������ʽ���㣺
 (11)
(11)
 (12)
(12)
ʽ�У�KΪբƬѹ����dΪ�ƶ�����ֱ������ Ϊ�ƶ����ʣ�FΪ���ⵯ������ �� Ϊ����Ч�ʣ����� ΪբƬĦ�����������þ��鹫ʽ����[14]��
 (13)
(13)
ʽ�У�vΪ���������ٶȡ�
ͨ��Ϊ�˼����������ٶ�ȡΪ�г��ٶ�[14]�����ǵ�����ʱ�г��ٶ��복��ת�����ٶȲ��ܴ����н����������ٶ�ȡΪ����ת�����ٶȡ�
2.2��������ֵ�������Ʒ�����ģ
�������Ʒ����кܶ��֣���������ֵ����ģ�����Ʒ�����ģ���Ʒ��������編�Լ��������ַ����Ľ�ϣ����У�������ֵ����չ��Ϊ���죬ʹ����Ϊ�㷺��������ֵ���������ٶ���ֵ�����们��(�ٶȲ�)��ֵ��������ּ���о��们����ֵ�����Գ���ĥ�ĵ�Ӱ�죬�们����ֵ���ƹ�����ͼ3��ʾ����ij�����们�ʦ�=(vc-vi)/vc������ֵʱ(viΪ��i���ٶ�)���ƶ���ʼ���ŷ綯��[15-16](ͼ3��t2��)���������ٶȻָ����ƶ���ʼ�γ��(ͼ3��t1��)��
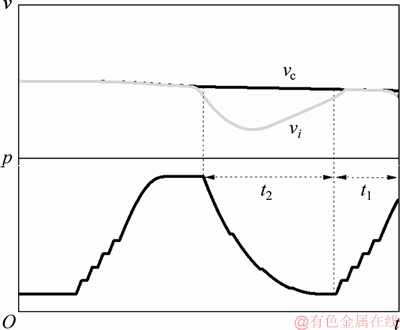
ͼ3���们����ֵ���ƹ���
Fig. 3��Process of creep rate threshold control
ͼ4��ʾΪ�ƶ���������ʾ��ͼ��ͨ��Simpack���嶯��ѧ������Matlab/Simulink���Ϸ���ʵ�ֳ����ƶ��������Ƶ�ģ�⡣��Simpack�н��г���ϵͳ�Ķ���ѧ���㣬ͨ��SIMAT�ӿڽ����ݴ����Simulink����ģ�飬��������ݰ�����Ƶķ������жϳ����Ļ�������������ƶ�ģ����ݻ����жϽ���������Ҫ���ƶ����أ�����ƶ�ת����Ϊ���뷴��������ϵͳ����ѧģ���У��ټ���������һ������ѧ���㡣
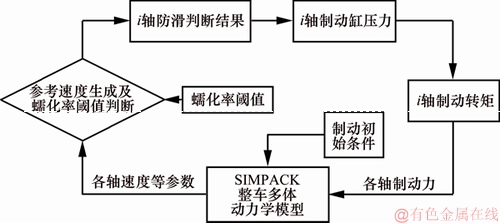
ͼ4���ƶ���������ʾ��ͼ
Fig. 4��Schematic diagram of braking anti-skid control
ͨ�����ýӽ������ٶȵ�ģ���ٶ���Ϊʵ���г��ο��ٶ�[17]��
1) 4�������ٶ���ߵ�������Ϊ�ο��ٶȡ�
2) ��4���ᶼ���ֻ���ʱ�����ٶ���ߵ�������Ϊ�ο��ٶ��Ѿ����ܴﵽ����Ҫ��ʱ����ֱ�ߴ��ŷ�����ο��ٶȣ���ͼ5��ʾ��aHΪ�������ٶ�(�������ܵ������ٶȣ�����Խ�������ٶ�ԽС)���ο��ٶȰ��չ�ʽvr=vaH-aH��t���㣬���У�vaHΪȫ��ǰһʱ�̵IJο��ٶȣ�tΪȫ���ۼ�ʱ�䡣
3) ��������������������£�4������ٶ��½�ʱ��ϳ�����ɵ����ٶ�ƫ�ƹ��������ר�Ž�������ѹ���ķ�����������ת�����ٶ����µ����������ٶȡ�
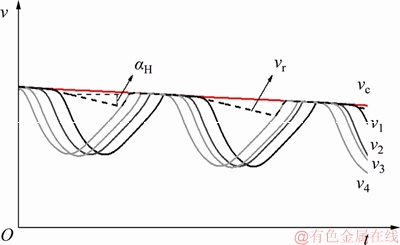
ͼ5���ο��ٶ��γ�[17]
Fig. 5��Formation of reference speed[17]
3 ���ڳ���ĥ�ĵ��们����ֵ�Ż�������
Ŀǰ���г�����ĥ�������о��϶࣬Ҳ���ڲ�ͬ�ĺ�����������ĥ��ָ��T������Ч��ӳ���ֵ�ĥ�������
 (14)
(14)
ʽ�У�Tx��Ty�ֱ�Ϊ�ֹ�����ͺ����们������x�ͦ�y�ֱ�Ϊ�ֹ�����ͺ����们�ʡ�
Ϊģ���г��ڿ��������ƶ��µķ������ƣ����������¹������г���350 km/h�ٶȶ���1 s��Ȼ��ʼʩ�ӽ����ƶ������ƶ���ѹ���ﵽ���ֵ����������������Ϊֱ�ߡ��ο�����[18]ģ��Ϳ����������������ʱĦ��������Ϊ0.1�����ǵ������ֳ��ֻ���ʱ�们�ʺܴ���Ħ�������������ֹ�们���ٶȵ���������½�����ˣ�����ʽ(4)��������ʵ�ʼ����������ϵ����С��0.1��
�们����ֵ���ƶ��������г����е�����ͬ���������죬һ��ȡֵΪ0.15[19]����Сɽ[15]�о����������ٶȴ���86.7 km/hʱ��CRH2�ͳ��们����ֵΪ0.15����������[20]�о�����������������£��ֹ����Ϳ��ʱ��������ŵ��Ӧ���们����0.01���������们��С��0.01ʱ���ֹ�������λ�����������б����[9]��������ֱ��������½���Ҳ�Ͳ������ͨ�������ϵĻ��У������们��С��0.01�����������Ƶ�ʶ��������������ƶ���ͬʱ�ή�ͷ�����������������ˣ�����ѡȡ�们��0.01~0.14�ڵ�9����ֵ���о���ͬ�们����ֵ�Է����ƶ���Ӱ�졣ÿ�������ƶ������ٶȾ���350 km/h��ʼ������50 km/hʱ������
���们����ֵ0.06������Ϊ��������ͼ6��ʾΪ�����ٶȼ���ο��ٶ���ʱ��ı仯���г��ڵ���Ź����½����ƶ����ֹ��������½����³��ֻ��У�������ϵͳͨ�������ƶ���ѹ����С�ƶ����أ�1����������ͼ7��ʾ���������ٶȻָ����������ƶ������Ӷ������ٶȻ���ֲ������������ػ��л����������г��ٶȽ��ͣ������ٶȵIJ��������ֹ������们�ʲ���������ˣ�����ĥ��ָ���IJ�����ֵ�������ٶȼ�С�������ӣ���ͼ8��ʾ����Ϳ�͵���Ź��������£��ٶȽϵ�ʱ�����ٵı仯���ֹ��们�ʵ�Ӱ��ϴ�ʹĥ��ָ���ڵ��ٶβ�����ֵ�ܴ�
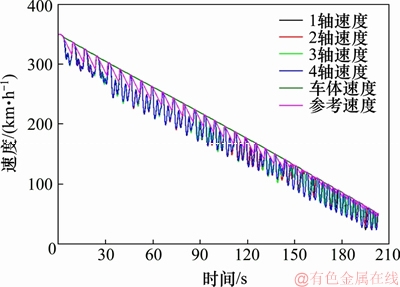
ͼ6���们����ֵ0.06ʱ�ٶȱ仯
Fig. 6��Speed change result of creep rate threshold of 0.06
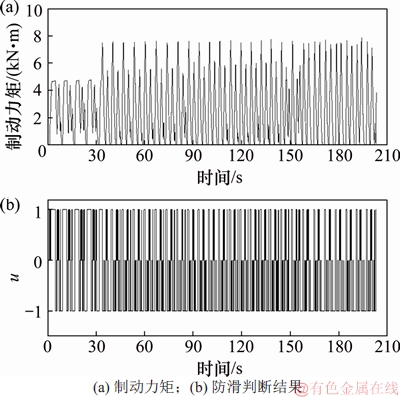
ͼ7���们����ֵ0.06ʱ��1������жϽ��
Fig. 7��1-axis anti-skid judgment result of creep rate threshold of 0.06
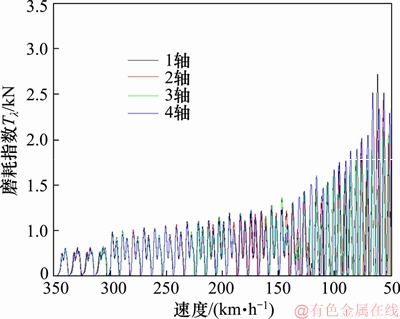
ͼ8���们����ֵ0.06ʱ��ĥ��ָ��
Fig. 8��Wear index of creep rate threshold of 0.06
Ϊ�˱����о���ͬ�ٶ��µij���ĥ��ָ���仯�������50 km/hΪ���Σ��������ٶ���350 km/h������50 km/h����Ϊ6�Ρ������˲�ͬ�们����ֵ�����²�ͬ�ٶȶεij���ĥ��ƽ��ֵ���������ӳ�����ݵ���ɢ�̶ȣ��䶨�����£�
 (15)
(15)
ʽ�У�NΪ��������xjΪ��j�����ݡ�
ͼ9��ͼ10��ʾ�ֱ�Ϊ��ͬ�们����ֵ�²�ͬ�ٶȶεij���ĥ��ָ��ƽ��ֵ�ͱ����ͼ9��10���Կ���������ĥ��ָ����ƽ��ֵ�����们����ֵ�ļ�С����С�������ٶȼ�С��������������Ϊ�们����ֵ�����³��ַ����ӳ���ʹ�����ٶ�ƫ�������ֹ��们�ʱ����ĥ��ָ������ĥ��ָ���IJ�����ֵ����ƽ��ֵ������ͬ�ı仯���ɡ��ʻ��ڳ���ĥ�Ŀ��ǣ��们����ֵΪ0.01ʱ������ĥ��ָ����С�Ҳ�����ֵ��С��
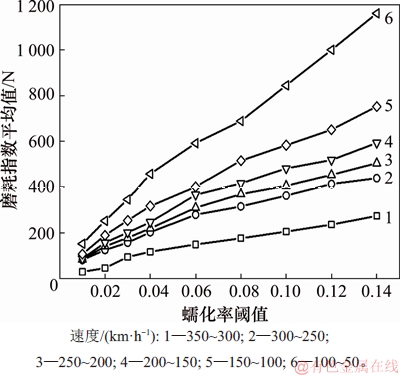
ͼ9����ͬ�ٶȶ�ĥ��ָ��ƽ��ֵͳ��
Fig. 9��Average statistics of wear index with different speed segments
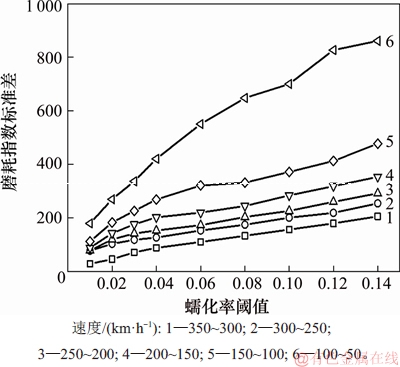
ͼ10����ͬ�ٶȶ�ĥ��ָ������ͳ��
Fig. 10��Standard deviation statistics of wear index with different speed segments
Ϊ���ӷ���ʵ�ʷ��������������ٶȷ���ͬ����������ƣ����ٶ���ֵ����ȡֵΪ3~4 m/s2[17]�����ǵ������о�����Ϊ�����г����ٶȽϸ�ʱ���ٶȽϵͣ��ۺϿ���ȡֵΪ2.5 m/s2��
ͼ11��ͼ12��ʾ�ֱ�Ϊ������ٶȷ����们����ֵ0.06ʱ�ٶȺͳ���ĥ��ָ������ͼ6��ͼ8�Աȿ�֪�������ٶȱ仯��ֵ��С������ĥ��ָ��������ֵ���Խ��ͣ����������ٶȵı仯������ͬ��
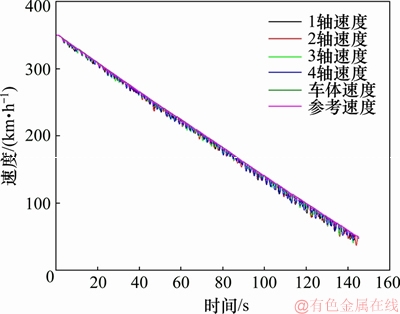
ͼ11�����ٶȷ���ͬ����ʱ�ٶȱ仯
Fig. 11��Speed change combined with deceleration method
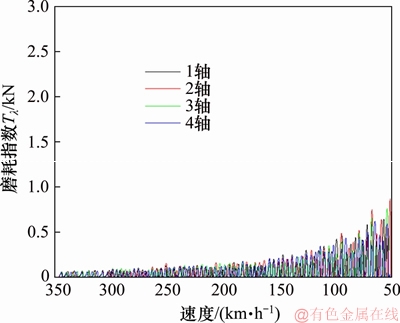
ͼ12�����ٶȷ���ͬ����ʱĥ��ָ��
Fig. 12��Wear index combined with deceleration method
Ϊ�о����ٶȷ�����ʱ�ij���ĥ�ı仯�������Բ�ͬ�们����ֵ������������ٶȷ����·��棬�����������䣬����õ���ͬ�ٶȶγ���ĥ��ָ����ƽ��ֵ����ͼ13��ʾ���ɼ����们����ֵ���ӵ�һ��ֵ��ĥ��ָ��ƽ��ֵ�����ᷢ���仯�����Ҹ�ֵ�������ٶ����Ӷ���С(ͼ13�С���Ϊ�们����Ч��ֵ)�����ڵ���Ź��������¼��ٶȷ��жϽ�Ѹ�٣����们�ʷ��ǵ����ֻ����ٶ���ʱ���ۻ�����һ��ֵ��Żᴥ��������������ˣ����们����ֵ����ʱ�����们�ʷ���δ��������ʱ�����ٶȷ�������������������������ͬ�ٶȶΣ��们����ֵ���ӵ���Ч��ֵ��ĥ��ָ�����ᷢ���仯�������г��ٶȽ��ͣ��们�ʵIJ�����ֵ��������ʹ�ýϴ��们����ֵ���ٶȽϵ�ʱҲ�ᴥ�������������们����Ч��ֵ�����ٶ������������ˣ������г��ڵ���Ź��������½����ƶ�ʱ���ڲ�ͬ�ٶ��£��们����ֵС����Ч��ֵ����ĥ�IJŻ����Ż��ռ䡣
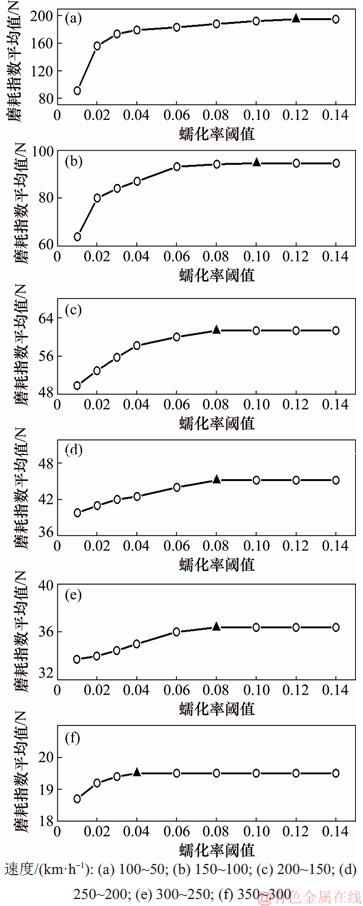
ͼ13����ͬ�们����ֵʱĥ��ָ��ƽ��ֵ
Fig. 13��Average wear index of different creep rate thresholds
4 ����
1) �����˿����ƶ����������Եĸ��ٳ����ƶ���������ϵͳģ�ͣ��о��˷��������Գ����ڵ���Ź��������½����ƶ��ij���ĥ��Ӱ�졣���������������Ľ���������������ϵͳ�ܹ���Ч�ط�ֹ�����ڵ���������ֻ��С�
2) �们�ʷ���������ʱ���ڱ��Ŀ��ǵ���ֵ��Χ������ĥ��ָ���������们����ֵ������������������ٶȵĽ�С������
3) ���Ǽ��ٶȷ���ͬ����ʱ�������们����ֵ��������ĥ��ָ��������ֲ��䣬���ұ��ֲ���ʱ��Ӧ���们����ֵ�������ٶȵļ�С������
4) �����ٶ���ֵΪ2.5 m/s2ʱ���г����ٶ�300~150 km/h��Χ�ڣ��们����ֵ����0.08ʱ����Ӱ�쳵��ĥ�ġ���������ֵ����0.08ʱ�ɲ��������Ż���ʽ�����Ż�������ֵС��0.08ʱ��С�们����ֵ�ɼ�С����ĥ�ġ�
�ο����ף�
[1] ��ѧ��, ����Ծ. �ֹ�Ħ��ѧ[M]. ����: �й�����������, 2004: 150-159.
JIN Xuesong, LIU Qiyue. Tribology of wheel and rail[M]. Beijing: China Railway Press, 2004: 150-159.
[2] ������, ����, ����. �г������ƶ��������Ƽ������[J]. ����ѧ��, 2009, 31(4): 25-31.
CHEN Zheming, ZENG Jing, LUO Ren. Wheel-slip prevention control and simulation under train pneumatic braking[J]. Journal of the China Railway Society, 2009, 31(4): 25-31.
[3] ZUO Jianyong, CHEN Zhongkai. Antiskid control of railway train braking based on adhesion creep behavior[J]. Chinese Journal of Mechanical Engineering, 2012, 25(3): 543-549.
[4] �źϼ�. ���������ƶ��������Ʒ���[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2013: 36-52.
ZHANG Heji. Simulation on anti-slip control of railway vehicle brake[D]. Chengdu: Southwest Jiaotong University. State Key Laboratory of Traction Power, 2013: 36-52.
[5] Τ�. �����鳬����Ź����ƶ��������������о�[J]. ����ѧ��, 2017, 39(9): 67-73.
WEI Hao. EMU anti-slide performance experimental study on ultra-low adhesion rail surface[J]. Journal of the China Railway Society, 2017, 39(9): 67-73.
[6] ZHANG Heji, MEI Guiming, WANG Hengyu, et al. Monitoring and cause qnalysis of tread abnormal wear in a metro line[J]. International Journal of Advanced Railway, 2014, 2(2): 115-118.
[7] TIAN Y, LIU S, DANIEL W J T, et al. Investigation of the impact of locomotive creep control on wear under changing contact conditions[J]. Vehicle System Dynamics, 2015, 53(5): 692-709.
[8] TIAN Y, DANIEL W J T, MEEHAN P A. Real-time rail�Cwheel wear damage control[J]. International Journal of Rail Transportation, 2016, 4(2): 113-129.
[9] POLACH O. Creep forces in simulations of traction vehicles running on adhesion limit[J]. Wear, 2005, 258(7/8): 992-1000.
[10] ������. �����г������ƶ�����ѧ��������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2010: 20-22.
CHEN Zheming. Study on the dynamics and control of high speed train under traction and braking[D]. Chengdu: Southwest Jiaotong University. State Key Laboratory of Traction Power, 2010: 20-22.
[11] ������, ����, ����. �г������ƶ��������Ƽ������[J]. ����ѧ��, 2009, 31(4): 25-31.
CHEN Zheming, ZENG Jing, LUO Ren. Wheel-slip prevention control and simulation under train pneumatic braking[J]. Journal of the China Railway Society, 2009, 31(4): 25-31.
[12] BAEK K S, KYOGOKU K, NAKAHARA T. An experimental investigation of transient traction characteristics in rolling�Csliding wheel/rail contacts under dry�Cwet conditions[J]. Wear, 2007, 263(1/2/3/4/5/6): 169-179.
[13] BU Fanping, TAN H S. Pneumatic brake control for precision stopping of heavy-duty vehicles[J]. IEEE Transactions on Control Systems Technology, 2007, 15(1): 53-64.
[14] TB/T 1407��1998. �г�ǣ��������[S].
TB/T 1407��1998. Regulations on railway train traction calculation[S].
[15] ��Сɽ. CRH2�Ͷ������ƶ�ϵͳ�������Ƶ��Ż�[J]. ��·�����Ӧ��, 2015, 24(10): 41-43, 46.
GU Xiaoshan. Optimization of anti-skid control method for braking system of CRH2 EMU[J]. Railway Computer Application, 2015, 24(10): 41-43, 46.
[16] ������, ������. һ�ֻ���DSP���ƵĶ��������������[J]. �����紫��, 2009(3): 45-47, 62.
LIU Yinhu. JIANG Chongmin. An anti-slip controller of EMUs based on DSP[J]. Electric Drive for Locomotives, 2009(3): 45-47, 62.
[17] ������. ���ٳ����ķ��������뻬�м��[J]. ��������, 1996, 34(12): 10-15.
LI Peishu. Anti-skid control and skid detection on high speed cars[J]. Rolling Stock, 1996, 34(12): 10-15.
[18] POPOVICI R I. Friction in wheel-rail contacts[D]. Enschede: University of Twente. Department of Engineering Technology, 2010: 79-88.
[19] С����, �����. ���м��װ�õķ�չ��ʷ�ͼ�������[J]. ������������, 1993, 30(1): 5-11.
XIAO Zeming, GE Peichang. Development and technological trends of sliding detection device[J]. Foreign Rolling Stock, 1993, 30(1): 5-11.
[20] ������, ������. �����ֹ�ճ�Ż��������о�[J]. ����ѧ��, 2000, 22(2): 20-25.
ZHANG Weihua, ZHOU Wenxiang. Experiment research on wheel/rail adhesion characteristics for high speed railway[J]. Journal of the China Railway Society, 2000, 22(2): 20-25.
���༭ �Կ���
�ո����ڣ� 2019 -03 -01; �����ڣ� 2019 -04 -13
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(U1734201) (Project(U1734201) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����壬��ʿ���о�Ա����ʿ����ʦ�����¹����ͨ�ֹ��ϵ���������о���E-mail��zfwen@home.swjtu.edu.cn

