摆动式单波束超声波水下微地形探测
赵海鸣,卜英勇,王纪婵,罗柏文
(中南大学 机电工程学院,湖南 长沙,410083)
摘 要:在分析各种水下地形测量方法及其特点的基础上,提出应用互相关超声波测距方法进行水下微地形高程数据测量。通过发射信号与回波信号进行互相关运算精确捕捉回波信号的到达时刻以实现高程数据的测量。设计一种以单探头单波束超声波测距为基础的水下微地形测量系统,并分析信号处理电路和数字信号处理方法。对不同地形和不同底质的地形进行高程数据测量,对海底模拟地形进行探测与重构。研究结果表明:经过时间增益控制和滤波处理后的信号所含有的噪声和混响信号得到了抑制;应用互相关超声波测距方法得到的高程数据误差在-1~1 cm以内;生成的微地形图真实地反映了被测地形的地貌特征。
关键词:富钴结壳;微地形;水下声纳;单波束
中图分类号:TB566 文献标识码:A 文章编号:1672-7207(2007)05-0932-05
Detection of seabed cobalt-rich crusts micro-topography based on single-beam ultrasonic wave
ZHAO Hai-ming, BU Ying-yong, WANG Ji-chan, LUO Bo-wen
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract:Based on analyzing various methods of detecting underwater topography, a new method of measurement elevation data of underwater micro-topography based on correlation ultrasonic range was proposed. To achieve precise elevation data, the time-delay was obtained by correlation operation sending wave and receiving wave. A system of detecting underwater micro-topography based on single-probe single-beam ultrasonic wave was designed. The signal processing circuit and data signal processing method were emphatically analyzed. The elevation data of various terrains with different stuffs and figures were measured. The stimulant seabed terrain was detected and reconstructed. The results show that the extent of reverberation and noise is small. The error of elevation data gained by correlation ultrasonic range is from -1 cm to 1 cm. The micro-topography map reconstructed really reflects the characters of the terrain detected.
Key words: cobalt-rich crusts; micro-topography; underwater sonar; single-beam
海底富钴结壳基岩的地形起伏很大,平坦处起伏为5~10 cm;复杂处经常出现台阶与峭壁,落差为 0.5 m至数米,有时出现沟槽,其间布满沉积物及大块卵石[1-3]。为了有效地进行海底富钴结壳矿床的开采,需要掌握海山上富钴结壳矿区的微地形(即以厘米为精度级的地形图)特性,并以此控制采矿头的切削参数,来提高采集效率[4-5]。目前水下地形探测主要方法有:多波束条带测深系统,其优点是一次扫描面积大,测量效率高,但其系统复杂,数据后处理时间长[6-7];测深侧扫声纳,又称干涉法条带测深系统,集测深与海底面声学成像于一身,其安装和使用较多波束测深系统方便,但它测量误差大,存在较大“盲区”[8]。
这些方法主要用于远距离大面积宏观地形的测量。中国地科院矿产资源研究所研制的深海彩色数字摄影系统,其性能稳定,图像清晰, 但只适用于透光性较好的浅水区域[9]。多探头单波束回声探测,在浅海地形探测时,比多波束探测优越,数据处理量小,但需要多个探头布置成一排,机构庞大,在海底采矿车前端没有足够的安装空间,该探测方法也不适用于微地形的探测[10]。卜英勇等[11]曾研制的机械式微地形探测仪是针对钴结壳开采而设计的,其测量精度可以达到厘米级,但因为探针需要接触地面,在工况恶劣的环境下实用性不好,容易损坏,为此,本文作者研究了一种摆动式单探头单波束超声波微地形探测方法。
1 互相关超声测距原理
超声波微地形探测的核心是用超声波测量得到厘米级的高程值。超声波测距的精度范围很广,如倒车雷达、机器人避障等,采用阈值检测法[12],方法简单、成本低,但测量精度不高。超声波测距也可用作微米级的超声扫描显微镜[13]及亚微米级精度的厚度测 量[14],其测量精度可达1 μm和0.1 μm,这些测量系统软硬件都相当复杂,价格昂贵,不适合用于海底富钴结壳微地形测量。这里介绍一种通过发射信号与回波信号进行互相关运算,从而精确捕捉回波信号的到达时刻的水下超声波测距原理。
超声波测距是通过捕捉超声波脉冲回声信号到达时刻,根据超声波在介质中的传播时间来确定被测目标的距离s。
s=c×t/2。 (1)
式中:t为超声波渡越时间,s;c为超声波在介质中的传播速度,m/s。超声波在水中的传播速度不是一个定值,它是温度、含盐量、深度(静压力)的复杂函数,这种函数关系一般不易用解析形式表示,工程上常用经验公式表示,下式是一种常用的经验公式[15]。


 。 (2)
。 (2)
式中:S为水的含盐度,‰;θ为温度,℃;Z为深度,m。
在一定测量环境下,通过测量水的温度θ,盐度S和深度Z可以求出相应的超声波传播速度,对于深度变化不大的近程测量,可以用平均深度来代替。
测量距离的关键是准确获得超声波渡越时间t。
对于收发一体式超声换能器,其超声波发射信号与回波信号有明显的相似性,可以通过互相关运算来判断回波到达时刻[16]。对于2个随机信号x(n)和y(n),其互相关函数可表示为

Rxy(m)的大小表示x(n)和y(n) 2个信号的相似程度,而超声波测距需要研究回波信号经过一段延时后与发射信号的相似程度,因此,需要将x(n)保持不动,y(n)左移m个时间点后y(n+m)与x(n)进行互相关运算,产生互相关函数:
 。 (4)
。 (4)
式中:x(n)为对应发射信号;y(n+m)为对应接收信号;n为信号的时间序列。Rxy(m)值反映了发射信号x(n)与接收信号y(n+m)在m点处波形的相似程度,当Rxy(m)取最大值时返回其对应点m (m为回波信号到达的时刻点),然后,将m与采样的时间间隔相乘,就得到了超声波的渡越时间t。根据式(1)可以确定被测目标的距离。
2 信号处理系统
2.1 发射信号处理
该系统选用收发一体式超声波换能器,谐振频率为500 kHz,-3 dB波束角为3?,直径为140 mm。发射电路由正弦波振荡电路、功率放大电路和阻抗匹配电路组成。振荡电路产生500 kHz连续正弦信号,通过单片机输出脉冲宽度为8 μs的方波信号进行控制,控制信号高电平时,连续正弦信号通过电子开关,再经功率放大后加载到超声探头,控制信号为低电平时,正弦信号被截止。为了发射功率能最大效率地通过换能器输出,需要根据换能器的电参数进行阻抗匹配,本系统通过串联电感来保证系统在500 kHz频率上谐振。
2.2 回波信号放大及噪声抑制
由于在探测过程中,受到环境噪声、机器噪声等背景噪声和系统自噪声的干扰,并且回波信号是mV级的微弱信号,在此设计了放大滤波电路,前置放大器选用精密运算放大器OP37,为了与换能器功率进行匹配,其放大器输入阻抗与换能器的输出阻抗数值相近。带通滤波电路由精密低噪声的运算放大器TL082和R及C网络构成,±12 V双电源供电。
为了进一步消除系统自噪声对测量结果的影响,在对采样信号与发射信号进行互相关运算前,需要先进行数字滤波,本系统选用FIR滤波器,将滤波系数序列h(n)与采样信号序列x(n)作线性卷积:
 。 (5)
。 (5)
式中:Y为对回波信号x(n)进行数字滤波后的结果。
2.3 混响及其抑制
混响干扰有不同于噪声干扰的许多特征,在近距离探测中,混响是主要背景干扰。混响是由于水中介质及界面等非目标物对发射信号反向散射波在接收点叠加而成,本身就是一种回波。混响包含的信号频率与发射信号频率相近,不能通过一般滤波电路或滤波算法消除。影响混响强度的因素很多,且错综复杂,很难准确预报。体积混响强度最弱,但衰减速度最慢,其强度与发射信号结束后的时间的平方成反比;底面混响强度最强,但衰减最快,与时间的4次方或5次方成反比衰减。因此,可以根据时间变化控制接收放大电路的增益,实现对混响信号幅度的抑制,同时,可以补偿超声波传播过程中的损失。在超声波微地形测量中,当发射换能器刚发出声脉冲后的一段时间里,混响很强,而真正回波还没有回来,此时,设置时间增益控制电路(TGC)的增益为最小,此后,根据混响衰减变化规律逐渐增加增益,直到最大。
本系统设计了通过软、硬件结合实现增益控制的AGC电路,它是由可编程放大器AD620AN、数字电位器MAX5400及电阻网络组成硬件电路,结合单片机软件实现增益随时间按指数规律变化。
3 摆动式微地形探测系统的应用
在实验室水池中进行微地形探测试验,实验装置原理如图1所示。图中,α为水声换能器对称中心线与z坐标的夹角;β为波束角。水声换能器可以在一个面内摆动,池底由若干块大小为30 cm 40 cm、用钴结壳模拟料制成的地形拼装而成,其表面模拟海底的自然地形随机构造,可以根据需要进行更换。实验装置由步进电机带动探头摆动,可连续摆动也可单步摆动。
40 cm、用钴结壳模拟料制成的地形拼装而成,其表面模拟海底的自然地形随机构造,可以根据需要进行更换。实验装置由步进电机带动探头摆动,可连续摆动也可单步摆动。
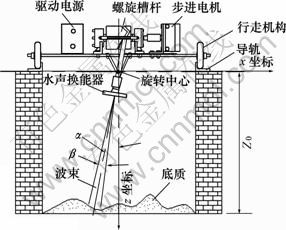
图1 实验台工作原理图
Fig.1 Principle of experiment platform
3.1 单点高程测量及分析
为验证该探测系统的测量精度,先进行单点测深试验,预先标定某点高程值,再用该系统测量标定点,对比标定值与测量值的误差。
图2所示为158 cm处河沙底质上测得的信号波形及互相关运算结果。图2(a)所示为采样信号y(n+m)滤波后的波形,采样频率为8 MHz,信号电压为0~5 V。考虑到发射激励信号持续时间和换能器余震的影响,对数字滤波后的数据序列截取从0点开始的200个数据点作为发射信号,并以此作为互相关运算参考信号x(n),采样序列对截取位置补零得数据序列y′(m)。对x(n)和y′(m) 2个数据序列进行互相关运算,其运算结果(互相关函数)的波形如图2(b)所示,纵坐标为x(n)和y′(m)在对应点的互相关计算结果,最大值对应的采样点m为回波到达时刻。测量水温θ,实验水池中水的含盐度S为0,水池平均水深Z为0.8 m,代入式(2)计算实验水体中的声速,根据式(1)可得到单点高程值。
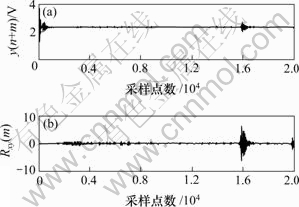
(a) 采样信号数字滤波结果;(b) 互相关运算结果
图2 采样信号数字滤波与互相关运算结果
Fig.2 Results of digital filter of sampling signal and correlation operation
由图2(a)可见,经过时间增益电路对混响信号的控制,通过硬件滤波和软件滤波后干扰信号得到了很好的抑制。由于探头是摆动的,地形是随机的,当探头与地形不是垂直相对时,回波信号幅值较小,有时用阈值检测法捕捉回波信号在许多点测不到数据,但通过互相关运算结果总可以准确找到回波到达时刻。
为了验证该系统对不同底质和不同地形的适用性,进一步进行单点测深实验,实验结果见表1。
表1 不同底质单点测深数据与误差
Table 1 Single point elevation data and error of different bottoms
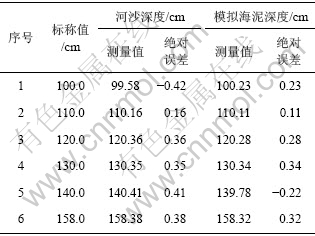
通过上述实验可知,虽然测量时回波信号的幅值和波形随底质不同而变化,应用互相关运算可以消除回波信号幅值变化对测量结果的影响,减小误测和漏测。将该方法运用到微地形测量系统中,得到高程数据误差在-1~1 cm以内。
3.2 三维微地形测量
在进行地形测量时,由单片机系统控制步进电机使超声波探头往复摆动,手动控制探测机架沿导轨纵向移动。探头每摆动1?得到1个测点高程,测点之间的间距不均匀,靠近边缘处间距最大,最大间距约为3 cm,在重构地形时,需要对测量数据进行插值处 理[17]。对图3所示的实验模拟地形(照片)进行测量和重构得到三维微地形图(见图4)。通过重构图与被测模拟地形照片对比可发现,重构得到的微地形图真实地反映了被测地形的地貌特征。
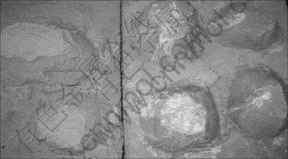
图3 被测随机地形实物照片
Fig.3 Photograph of random terrain detected
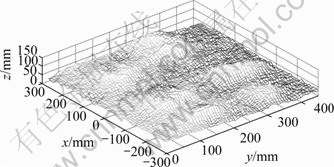
图4 测量数据重构地形图
Fig.4 Reconstruction terrain map based on measurement data
4 结 论
a. 根据超声波发射波与回波信号的相似性,利用互相关运算可以在信噪比很小的情况下准确确定回波到达时间,从而在复杂环境下实现超声波测距。以超声波测距为基础进行水下微地形的高程数据测量,其回波信号受到较强的噪声和混响的干扰。对采样信号进行分析发现,经过时间增益控制和滤波处理后的信号虽然仍含有混响信号,但其幅值比真实回波信号幅值小得多,与发射信号进行互相关运算不影响测量结果。
b. 在实验室水池中对模拟海泥、河沙底质分别进行了单点测距实验,得到了高程数据的测量误差在-1~1 cm以内。对海底模拟地形进行探测和数字地形重构,与实物照片对比发现,探测重构得到的微地形图能真实地反映被测地形特征。
c. 以摆动式单探头超声波测距系统测量微地形,数据处理量小,结构简单,可以安装在海底采矿车的前端,实时测量海底钴结壳微地形并以此控制采矿头的切削参数,以提高采集效率。
参考文献:
[1] 肖林京, 方 湄, 张文明. 大洋多金属结核开采研究进展与现状[J]. 金属矿山, 2000(8): 11-14.
XIAO Lin-jing, FANG Mei, ZHANG Wen-ming. Advance and present state of the research in oceanic metalliferous nodule mining[J]. Metal Mine, 2000(8): 11-14.
[2] Yamazaki T, Sharma R. Distribution characteristics of Co-rich manganese deposits on a seamount in the central Pacific Ocean[J]. Marine Georesources and Geotechnology, 1998, 16(4): 283-305.
[3] Yamazaki T, Sharma R, Tsurusaki K. Influence of distribution characteristics and associated seabed features on exploitation of cobalt-rich manganese deposits[C]//Proceeding of the ISOPE Ocean Mining Symposium. Golden: ISOPE, 1995: 119-124.
[4] XIA Yi-min, BU Ying-yong, MA Zhi-guo, et al. Modeling and simulation of ocean mining subsystem based on virtual prototyping technology[J]. J Cent South Univ Technol, 2005, 12(2): 176-180.
[5] XIA Yi-min, BU Ying-yong, TANG Pu-hua, et al. Modeling and simulation of crushing process of spiral mining head[J]. J Cent South Univ Technol, 2006, 13(2): 171-174.
[6] 陈卫民. 海底勘查技术的最新发展[J]. 海洋技术, 1996, 15(3): 25-29.
CHEN Wei-min. Development of the seafloor survey technology[J]. Ocean Technology, 1996, 15(3): 25-29.
[7] 陈非凡. 多波束条带测深仪发展动态[J]. 海洋技术, 1999, 18(2): 18-22.
CHEN Fei-fan. The developing of researches on multi-beam swath bathymeter[J]. Ocean Technology, 1999, 18(2): 25-29.
[8] 朱维庆, 刘晓东, 张东升. 高分辨率测深侧扫声纳[J]. 海洋技术, 2005, 24(4): 29-35.
ZHU Wei-qing, LIU Xiao-dong, ZHANG Dong-sheng. High resolution bathymetric side scan sonar[J]. Ocean Technology, 2005, 24(4): 29-35.
[9] 蒋鸿旺. 水下光电探测系统现状与发展[J]. 激光与红外, 1999, 29(3): 26-28.
JIANG Hong-wang. Underwater electro-optical detecting system status and development[J]. Laser & Infrared, 1999, 29(3): 26-28.
[10] 周良勇, 从鸿文. 滨浅海单波束测深潮汐改正的方法[J]. 海洋地质动态, 2005, 21(3): 36-39.
ZHOU Liang-yong, CONG Hong-wen. A method of tidal calibration for regional single beam bathymetry in shallow sea[J]. Marine Geology Letters, 2005, 21(3): 36-39.
[11] 卜英勇, 任凤跃, 罗柏文. 基于AVS/Express三维显示的机械式微地形探测仪研制[J]. 矿山机械, 2005, 33(12): 6-7.
BU Ying-yong, REN Feng-yue, LUO Bo-wen, Development of mechanical instrument of detecting tiny-topography based on AVS/Express 3-D display[J]. Mining & Processing Equipment, 2005, 33(12): 6-7.
[12] 路锦正, 王建勤, 杨绍国, 等. 超声波测距仪的设计[J]. 传感器技术, 2002, 29(8): 29-32.
LU Jin-zheng, WANG Jian-qin, YANG Shao-guo, et al. Design of system for ultrasonic distance measurement instrument[J]. Journal of Transducer Technology, 2002, 29(8): 29-32.
[13] Gudra T, Kojro Z, Schmachtl M, et al. Scanning acoustic air microscope[J]. Ultrasonic, 1996, 34: 711-719.
[14] Kokubo A, Takagi K. Ultrasonic micrometer with submicron precision[J]. Ultrasonic, 1995, 33: 253-256.
[15] 邢志刚, 封金星, 刘伯胜. 水声测距数学模型研究[J]. 哈尔滨工程大学学报, 2000, 21(3): 24-28.
XING Zhi-gang, FENG Jin-xing, LIU Bo-sheng. Study of range mathematical model by underwater acoustic[J]. Journal of Harbin Engineering University, 2000, 21(3): 24-28.
[16] 林海立, 曲兆松, 王兴奎. 河工模型超声地形仪的数字信号处理[J]. 水力发电, 2004, 30(11): 78-80.
LIN Hai-li, QU Zhao-song, WANG Xing-kui. Application of DSP to ultrasonic topographic surveying meter[J]. Water Power, 2004, 30(11): 78-80.
[17] 秦宣云, 卜英勇, 夏毅敏. 基于AIC准则优化的径向神经网络微地形曲面重构[J]. 中南大学学报: 自然科学版, 2004, 35(5): 815-819.
QIN Xuan-yun, BU Ying-yong, XIA Yi-min. Surface reconstruction for micr-landform based on RBF neural network optimized by AIC criterion[J]. J Cent South Univ: Science and Technology, 2004, 35(5): 815-819.
收稿日期:2007-03-26;修回日期:2007-04-28
基金项目: 国家自然科学基金资助项目(50474052)
作者简介:赵海鸣(1966-),男,湖南隆回人,博士研究生,从事机电一体化及海洋采矿装备和测量研究
通信作者:赵海鸣,男,博士研究生;电话:0731-8836819(O);E-mail:haiming_zhao@163.com

