文章编号:1004-0609(2014)06-1648-08
氧化铝晶种分解温度的分散自适应模型预测控制
刘 征1,彭小奇1, 2,陈 君1
(1. 中南大学 信息科学与工程学院,长沙 410083;
2. 湖南第一师范学院 信息科学与工程系,长沙 410205)
摘 要:氧化铝晶种分解过程是一个具有多级串联结构和强烈不可测干扰的大规模复杂过程,分解温度是其关键工艺参数。为精确控制分解温度,根据该过程的结构特点,将其分成多个子系统,并综合机理分析、参数辨识和时间序列分析方法建立基于不可测扰动预测的子系统自适应预测控制模型,并将前级子系统的状态作为可测扰动引入本级子系统模型,分别求解各子系统的优化控制目标,获取优化操作变量。基于实际生产过程数据的仿真结果表明,所提出的分散型自适应模型预测控制方法具有较强的抗干扰能力,能准确跟踪分解温度设定值,满足晶种分解生产过程中对分解终止温度、分解始末温差和降温速度的控制要求。本方法对于具有串联结构和不可测强干扰的非线性大规模复杂过程的模型预测控制具有显著的实用价值。
关键词:氧化铝;晶种分解;自适应预测模型;分散预测控制
中图分类号:TF355;TP273 文献标志码:A
Decentralized adaptive model predictive control of alumina seed decomposition temperature
LIU Zheng1, PENG Xiao-qi1, 2, CHEN Jun1
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Department of Information Science and Engineering, Hunan First Normal University, Changsha 410205, China)
Abstract: The alumina seed precipitation process is a complicated large-scale process with multi-stage tandem structure and strong unmeasured disturbances, in which the decomposition temperature is a key technological parameter. In order to control the decomposition temperature precisely, the process was divided into several subsystems according to its structural characteristics, and the adaptive predictive model of each subsystem based on unmeasured disturbance prediction was built by mechanism analysis, parameter estimation and time series analysis method. The front-end subsystem state as a measurable disturbance was introduced into the corresponding subsystem model, and the optimal operational variables were obtained by respectively solving the optimization objectives of each subsystem. The simulation results based on actual process data show that the proposed decentralized adaptive model predictive control (MPC) method has a strong capacity of resisting disturbances and a good following of the set point, and can meet the control requirements of terminal decomposition temperature, decomposition temperature range and the cooling rate for the alumina precipitation process. The proposed method can be applied to the nonlinear complicated large-scale process with multi-stage tandem structure and strong unmeasured disturbances, and is of remarkable practical value.
Key words: alumina; seed precipitation; adaptive predictive model; decentralized model predictive control
晶种分解是拜尔法生产氧化铝工艺的关键工序之一,其分解率和分解质量直接影响氧化铝的产量和质量[1]。研究表明[2-4],分解降温制度对氧化铝的分解率和分解质量有很大影响,分解温度是分解过程的关键工艺参数,各分解槽的分解温度应根据合理的分解降温制度保持在某一固定值,其波动不宜超过0.5 K。目前,实际生产中各种分槽的分解温度由操作人员根据生产经验和天气状况调节中间降温设备的冷却水流量来进行控制。由于晶种分解过程具有大规模、大惯性、非线性、强干扰和参数分散分布等特点,且影响分解温度的自然散热量、结晶放热量等参数无法测量,人工控制的分解温度误差大,波动幅度远超过0.5 K,因此,实现氧化铝晶种分解温度的准确控制和自动控制成为生产中亟待解决的问题。
模型预测控制(MPC)能对系统状态的未来轨迹进行预测,实现多目标优化,并能处理多输入、多输出系统的各类约束,是复杂工业过程控制中最有效的方法之一。但对于大规模的复杂工业过程,集中式MPC在实际实现时存在一系列问题,因此,近年来分散型和分布式预测控制(DMPC)成为大规模系统的重要控制方法和研究热点[5]。ALVARADO等[6]在一套四容水箱装置上比较了集中式MPC、分散型MPC及多种分布式MPC的性能,发现集中式MPC的整体控制性能最佳,但设定值改变时稳定耗时最长,计算量最大;纯分散型MPC存在稳态误差,整体控制性能最差,但瞬时控制性能最佳,稳定时间最短,计算量最小;分布式MPC的整体性能介于集中式和分散型MPC之间,但其性能的提高以加大计算量和通信量为代价。一些分布式MPC算法[7-9]虽然能在多次迭代计算后收敛于全局最优解,但实际应用时仍需在计算量、通信量和优化性能方面进行权衡,而改进后的分散型MPC算法既能减小稳态误差,又能保持计算量小、响应快速的优势,如EDURADO等[10]提出的基于稳定约束的分散型MPC算法,在系统状态可观测的前提下可保证系统闭环稳定;MOHAMED等[11]将分散型MPC应用于电力系统载荷频率控制,仿真结果表明在模型失配和载荷扰动下闭环系统具有良好的控制性能和鲁棒性;ALESSANDRO等[12]将无法从机理上明确划分的动态耦合大规模系统分解成多个重叠的子系统,并用观测器辨识出各解耦子系统的系统参数,不同的子系统可共享全局状态和输入,从而减小了建模误差,提高了子控制器的协作能力,且计算量和交互信息量较小,能保证算法的稳定性,但控制性能较集中式MPC的略有下降;OCAMPO-MARTINEZ等[13]提出了基于图论的大规模系统的子系统划分方法,并在分散型预测控制框架下讨论了该方法对计算量和全局性能的影响;ZARATE FLOREZ等[14]提出了基于协调的分散型MPC,仿真结果表明其协调器和子系统的交互信息量少,全局性能损失很小。
本文作者考虑到晶种分解过程是典型的由多个种分槽和换热器串联构成的大规模复杂系统,存在强烈的不可测干扰,故将其分成多个子系统进行建模,分别对子系统的不可测扰动进行自适应估计来提高预测模型的精度,并针对每个子系统独立设计相应的MPC子控制器,每个子控制器将前级子系统的预测状态作为可测扰动进行处理,分别求解各子系统的优化控制目标,获得优化操作变量,从而降低因子系统之间的耦合对控制性能产生的不良影响。基于实际生产过程数据的仿真结果表明,本文方法可获得满意的控制性能。
1 晶种分解工序概述
晶种分解过程如图1所示。由图1可见,经过除杂精制的铝酸钠溶液在降至合适的分解初始温度后被泵入种分首槽(1号种分槽),在常压下加入晶种的同时不断搅拌混合,所形成的分解浆料从高位的种分首槽顺序自压流经多个带机械搅拌的低位种分槽,在此过程中,分解浆料逐渐冷却分解析出氢氧化铝结晶。整个分解过程的物料流量由进料泵控制;钢质种分槽内发生结晶放热反应,槽外壁与周围环境换热,各槽的提料筒处安装了检测槽内浆料温度的插入式温度计;部分中间槽的顶部装配了宽流道板式换热器,槽中浆料由泵送至换热器,与来自循环水道的冷却水换热冷却后返回种分槽,与槽内其他浆料混合;换热器冷、热介质进出口处装配了温度计检测,冷却水进口装配了流量计检测,通过设置电动阀门开度可控制冷却水流量,从而控制种分槽内浆料的温度,即分解温度。为保证分解率和分解质量,生产工艺要求分解终温(即种分末槽内物料温度)恒定,分解过程降温速度均匀,且物料从种分首槽到末槽的温度梯度在10 K以上。由于人工调节冷却水流量时,受控分解温度响应延时较大,外界干扰强烈且无法全部测量,因此只能基本保证首、末种分槽分解温差在10 K以上,而各个种分槽的分解温度波动较大,特别是天气突然变化时,分解温度波动剧烈会加剧周期性结晶粒度细化现象,不利于提高氧化铝的产量和质量。
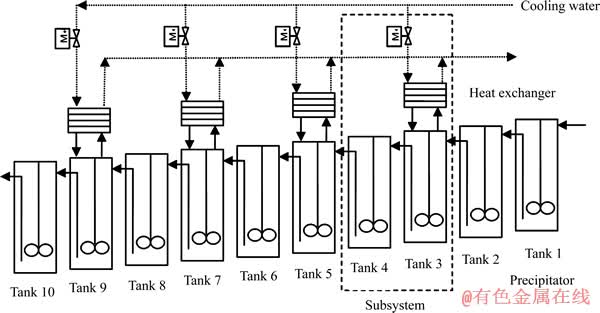
图1 氧化铝晶种分解过程示意图
Fig. 1 Schematic diagram of alumina seed precipitation process
2 种分槽系统模型
图1所示的晶种分解过程的机理模型如式(1)[15]所示:

 i=1, …, 10 (1)
i=1, …, 10 (1)
式中:i为种分槽序号;Ti为i号种分槽内的分解温度,K;T0为流入种分首槽物料的温度,K;t为分解时间,h;F为流经种分槽物料的流量,m3/h;V为种分槽内物料的体积,m3;ρ和ρw分别为物料和冷却水的密度,kg/m3;cp和cp,w分别为物料和冷却水的定压比热容,J/(kg・K);Fwi为流经i号种分槽上装配的换热器的冷却水流量,m3/h,若种分槽未装配换热器,则Fwi恒为0;Twi,in和Twi,out分别为流入、流出换热器的冷却水温度,K;△Hi为单位时间内i号种分槽中的反应焓变,J/g;Qi为单位时间内i号种分槽表面的自然散热量,J/h。种分槽内的反应焓变△H和自然散热量Q实际上无法直接测量,影响两者的变量也不能实时在线测量,为模型中的不可测扰动。
式(1)中流出换热器的冷却水温度Tw,out由流入换热器的介质温度、流量、换热器总传热系数等变量共同决定,该换热过程可由式(2)所示的换热器静态模型描述[16]:
 (2)
(2)
式中:Ta,in为流入换热器的分解浆料温度,K;Fa为流入换热器的分解浆料流量,m3/h;A为换热器的总换热面积,m2;U为换热器的总传热系数,W/(m2・K),与冷却水流量间的关系可由式(3)描述[16],式中的待定系数θ1、θ2和θ3随工况变化而变化,但在晶种分解过程中,冷、热两侧换热介质和换热器板片的物性参数随温度变化很小,且分解浆料侧的流量保持恒定,故换热器热侧的对流换热系数也基本恒定,即θ1、θ2和θ3基本恒定,可由相关生产数据辨识得到。
 (3)
(3)
由式(1)~(3)可知,晶种分解过程模型是一类输入非线性、多输入多输出、具有不可测扰动的串联耦合模型。针对如此复杂的大规模过程模型,直接设计和执行集中型MPC控制器都存在较大难度。为简化模型复杂度、提高控制器的计算速度和可靠性,可将其划分为多个子系统进行建模,并独立设计相应的子控制器对各子系统进行分散控制。因换热器内的换热过程达到平衡态的时间远少于种分槽内分解温度达到平衡态的时间,故每个子系统可描述为Hammerstein非线性模型[17],即由一个动态线性环节和一个静态非线性环节组成。分散控制不考虑子系统间的耦合关系,为避免其导致的模型失配和控制性能损失,将前级子系统的状态作为可测扰动引入本级子系统模型中。本文作者根据种分设备的联接规律,选择每相邻的两个种分槽作为一个子系统,即将图1所示的种分槽系统划分为5个相似的子系统。其中,1号槽和2号槽都未装配换热器,因此两槽内的分解温度实际上不可控,其子系统模型仅用于预测后级子系统的扰动。
令 ,定义函数
,定义函数
 ,由式(2)可得:
,由式(2)可得:

 (4)
(4)
将状态Ti记为xi;Fwi是用于控制分解温度的实际可操作变量,记为ui;可测扰动Tai,in、Twi,in和Fai分别记为d1i、d 2i、d 3i;第i个种分槽的不可测扰动记为wi。则子系统的状态Hammerstein离散模型可描述为
 (5)
(5)
 (6)
(6)
式中:j为子系统序号,且有 ;
; ,
, ;
; ;
;
 ;
; ;
; ;
; ;
; 。
。
3 分散型自适应预测控制策略
式(5)中的Wj(k)不可测,但可由式(7)进行观测:

 (7)
(7)
因能量传递过程存在较大惯性,故wi(k)的时间序列值之间必然存在某种统计规律,通过建立描述这种统计规律的模型,可对wi(k)序列进行预测。由于wi(k) 的历史时间序列值的自相关图呈现出拖尾特性,而偏自相关图呈现出明显的2阶截尾特性,故可用式(8)所示的2阶自回归模型对每个子系统的干扰wi(k)建模:
 (8)
(8)
式中:ε(k)为零均值白噪声;φi0、φi1和φi2为模型参数,可由wi(k)的历史观测值进行估计,每获得一个新的wi(k)观测值,便重新估计模型参数,然后用新模型预测后续扰动。
因种分槽子系统为Hammerstein模型,故采用计算量小、容易实施的两步法非线性MPC策略[17],即对每个子系统滚动求解式(9)所示的线性优化问题,得到当前的最优中间控制变量Vj*(k)后,用数值法求解非线性静态方程(6),即可得当前最优操作控制变量ui(k)。
 , j=1, …, 5 (9a)
, j=1, …, 5 (9a)
s.t. 
 (9b)
(9b)

 (9c)
(9c)
 (9d)
(9d)
 (9e)
(9e)
不等式约束(9d)和(9e)由实际约束经过非线性方程(4)换算得到。
分散型自适应控制算法如下:
1) 离线计算A、B、E和W;初始化Pj、Mj、Qj、Rj和采样时间等控制器可调设计参数;根据系统控制要求设定 。
。
2) 读入k时刻控制输入ui(k-1)、系统状态xi(k),可测扰动T0(k),并计算出相应的中间输入vi(k-1)。
3) 由式(7)观测Wj(t-1),更新自回归模型式(8)中的参数,由更新后的模型(8)预测后续扰动Wj(t+k-1)。
4) 由式(9c)计算 ,t=1, …, P1,求解式(9a)得V2*(k),并计算出
,t=1, …, P1,求解式(9a)得V2*(k),并计算出 ;根据以上步骤可得V3*(k)、V4*(k)和V5*(k)。
;根据以上步骤可得V3*(k)、V4*(k)和V5*(k)。
5) 计算出Vj*(k)后,用数值法求解式(6)得到ui(k)。
6) 执行ui(k),令k=k+1,转入步骤2)。
4 仿真实验及结果分析
选取某氧化铝厂的晶种分解过程作为仿真实验对象,过程运行于表1所示工作点附近。本文作者采用该厂2011年10月的实际生产数据对换热器模型中的待定系数θ1、θ2和θ3进行辨识,由种分槽子系统模型式(5)和(6)计算出的3号和4号种分槽的分解温度与现场实测的分解温度的对比如图2所示。Wj(k)因不可测而未纳入计算,3和4号槽的模型计算结果与实测序列的Theil不等系数[18]分别为0.35和0.31,该值越接近0,表示两条曲线越一致,可见该子模型能基本正确地描述实际过程,但因忽略了实际过程中的反应焓变和自然散热等不可测干扰,因此,模型输出与实际过程存在一定误差。由式(6)和(7)对不可测扰动Wj(k)进行自适应估计和预测,根据其预测结果计算出的分解温度与实测分解温度的对比如图3所示,计算结果与实测序列的Theil不等系数分别为0.10和0.07,可见自适应模型因能估计和预测不可测扰动而明显提高了预测模型的精度,其使用必然改善子模型预测控制器的性能。
表1 模型参数说明
Table 1 Description of model parameters
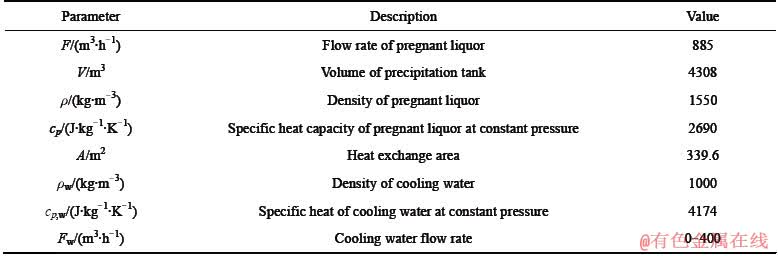
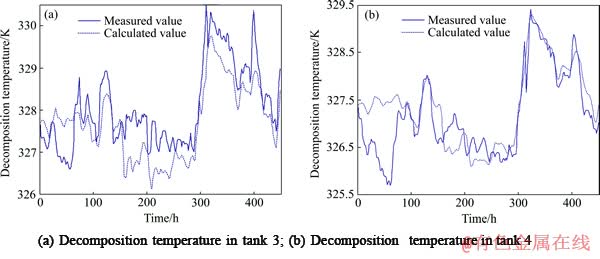
图2 种分槽子系统模型动态仿真曲线
Fig. 2 Dynamic simulation result of precipitator subsystem model
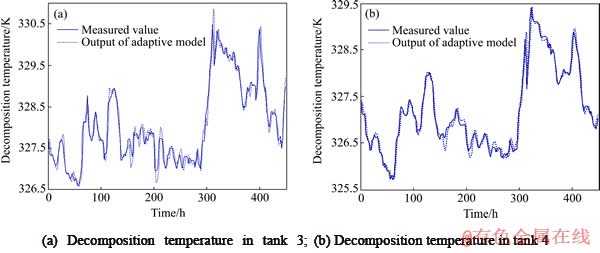
图3 种分槽子系统自适应模型动态仿真
Fig. 3 Dynamic simulation result of precipitator subsystem adaptive model
表2 各种分槽内分解温度设定值
Table 2 Setpoints of decomposition temperature in precipitation tanks


图4 采用分散型自适应模型预测控制算法的闭环系统性能
Fig. 4 Performance of closed-loop system with decentralized adaptive MPC
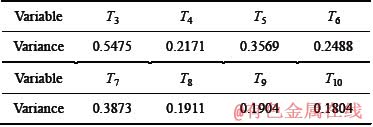
种分温度的分散型控制仿真均采用某氧化铝厂2011年11月包含了真实扰动和噪声的实际生产数据作为输入,这些数据没有进行任何滤波降噪处理,并包含了近似阶跃信号的可测扰动,采样时间为1 h。因为实际生产中各子系统使用的装备型号统一,所以子控制器参数统一设计为P=12,M=2,Q=diag{1,…,1},R=diag{0.01,…,0.01}。各种分槽内的分解温度参考值根据生产工艺要求均匀设定,如表2所示。1号和2号槽实际上不可控,故不设定参考温度。实际生产中希望分解温度稳定且降温梯度均匀,分解温度参考值不需频繁变化,故只研究了闭环控制系统的定值跟踪性能,受控系统输出的各槽分解温度如图4所示。进入种分槽的浆料温度T0由上游工序控制,波动幅度约2 K,在150和300 h处有近似跃变的降温和升温过程,T1和T2因不可控而随输入温度波动,受结晶放热的影响,T2通常略高于 T1,仿真结果与实际情况吻合;受控分解温度T3~T10跟踪设定值的方差如表3所列。由表3可知,受控分解温度T3~T10跟踪设定值的方差基本在-0.5~0.5 K的范围内围绕设定值波动,具有较高的稳态控制精度;在同一子系统中,上级种分槽中的受控分解温度与设定值之间的方差都略高于下级种分槽,这是因为上级种分槽装备了换热器,其不可测扰动中包含的来自换热器的扰动对控制器性能存在一定影响;当输入扰动较大时(150 h和300 h处),受控温度波动幅度也随之增大,但越靠近分解末槽的分解终止温度,波动幅度就越小,能很好的抑制输入温度波动的干扰。可见,本文所提出的分散型自适应模型预测控制方法有较强的抗干扰性能,能准确跟踪设定值,满足晶种分解生产过程中对分解终止温度、分解始末温差和降温速度的控制要求。
表3 受控变量与设定值的方差
Table 3 Variance between controlled variables and setpoints
5 结论
1) 将机理分析与参数辨识相结合,建立了描述氧化铝晶种分解过程的复杂动态模型,并根据大规模串联系统的结构规律性将其分解成多个类似的子模型,从而简化了模型的复杂度,子模型具有Hammerstein模型结构,易于采用非线性预测控制技术设计子控制器,仿真结果验证了模型的正确性。
2) 根据氧化铝晶种分解过程具有不可测强干扰的特点,建立了基于不可测干扰估计的干扰自适应预测模型。仿真结果表明,该模型能提高子系统模型对工况变化和不可测干扰的自适应能力,明显改善了对分解温度的预测精度,有利于改善子系统控制器的性能。
3) 本研究中所提出的分散型模型预测控制方法,针对各子系统独立设计子控制器并实施分散控制,子控制器只需分别求解局部优化目标,保持了分散控制计算量小的优势;同时将前级子系统的状态作为可测扰动引入后级子系统模型,又避免了分散型控制器通常的稳态控制精度不佳的问题,基于实际生产过程数据的仿真研究表明,该方法可获得较优的控制性能。
4) 此方法适用于具有串联结构和不可测强干扰的非线性大规模过程的模型预测控制,具有显著的实用价值。
REFERENCES
[1] 许国栋, 敖 宏, 佘元冠. 可持续发展背景下世界铝工业发展现状、趋势及我国的对策[J]. 中国有色金属学报, 2012, 22(7): 2040-2051.
XU Guo-dong, AO Hong, SHE Yuan-guan. Current status and development trend of aluminum industry in world and strategy suggestions in China under background of sustainable development[J]. The Chinese Journal of Nonferrous Metals, 2012, 22(7): 2040-2051.
[2] 张家元, 李永清, 付明辉, 刘 斌, 李 黎. 氧化铝种分过程浓度及质量比模型的研究[J]. 中南大学学报: 自然科学版, 2011, 42(6): 1543-1548.
ZHANG Jia-yuan, LI Yong-qing, FU Ming-hui, LIU Bin, LI Li. Concentration and mass ratio model of gibbsite precipitation process in alumina[J]. Journal of Central South University of Technology: Natural Science, 2011, 42(6): 1543-1548.
[3] WU Yu-sheng, ZHANG Di, LI Ming-chun, BI Shi-wen, YANG Yi-hong. Periodical attenuation of Al(OH)3 particles from seed precipitation sodium aluminate solution[J]. Transactions of Nonferrous Metals Society of China, 2010, 20(3): 528-532.
[4] 张家元, 李永清, 付明辉, 刘 斌. 氧化铝种分过程粒度分布的动态模型[J]. 中南大学学报: 自然科学版, 2009, 40(4): 799-883.
ZHANG Jia-yuan, LI yong-qing, FU Ming-hui, LIU Bin. Particle distribution dynamic model of gibbsite precipitation process during alumina production[J]. Journal of Central South University: Science and Technology, 2009, 40(4): 799-883.
[5] CHRISTOFIDES P D, SCATTOLINI R, de la PENA D M, LIU J F. Distributed model predictive control: A tutorial review and future research directions[J]. Computers and Chemical Engineering, 2013, 51: 21-41.
[6] ALVARADO I, LIMON D, de la PENA D M, MAESTRE J M, RIDAO M A, SCHEU H, MARQUARDT W, NEGENBORN R R, de SCHUTTER B, VALENCIA F, ESPINOSA J. A comparative analysis of distributed MPC techniques applied to the HD-MPC four-tank benchmark[J]. Journal of Process Control, 2011, 21: 800-815.
[7] SCHEU H, MARQUARDT W. Sensitivity-based coordination in distributed model predictive control[J]. Journal of Process Control, 2011, 21: 715-728.
[8] GISELSSON P, DOAN M D, KEVICZKY T, de SCHUTTER B, RANTZER A. Accelerated gradient methods and dual decomposition in distributed model predictive control[J]. Automatica, 2013, 49: 829-833.
[9] ZHANG Yan, LI Shao-yuan. Networked model predictive control based on neighborhood optimization for serially connected large-scale processes[J]. Journal of Process Control, 2007, 17: 37-50.
[10] EDUARDO C, DONG J, BRUCE H K, SAROSH T. Distributed model predictive control[J]. IEEE Control Systems Magazine, 2002, 22(1): 44-52.
[11] MOHAMED T H, BEVRANI H, HASSAN A A, HIYAMA T. Decentralized model predictive based load frequency control in an interconnected power system[J]. Energy Conversion and Management, 2011, 52: 1208-1214.
[12] ALESSANDRO A, DAVIDE B, ALBERTO B. Decentralized model predictive control of dynamically coupled linear systems[J]. Journal of Process Control, 2011, 21: 705-714.
[13] OCAMPO-MARTINEZ C, BOVO S, PUIG V. Partitioning approach oriented to the decentralized predictive control of large-scale systems[J]. Journal of Process Control, 2011, 21: 775-786.
[14] ZARATE FLOREZ J, MARTINEZ J, BESANCON G, FAILLE D. Decentralized-coordinated model predictive control for a hydro-power valley[J]. Mathematics and Computers in Simulation, 2013, 91: 108-118.
[15] 刘 征, 彭小奇. 氧化铝晶种分解能量传递过程的动态建模[J]. 中南大学学报: 自然科学版, 2013, 44(3): 1037-1042.
LIU Zheng, PENG Xiao-qi. Dynamic modeling for energy transfer process in alumina precipitation[J]. Journal of Central South University: Science and Technology, 2013, 44(3): 1037-1042.
[16] 刘 征, 彭小奇, 汪明宏, 陈 君. 基于扰动预测的氧化铝晶种分解过程建模与温度预测控制[J]. 中国有色金属学报, 2013, 23(8): 2309-2315.
LIU Zheng, PENG Xiao-qi, WANG Ming-hong, CHEN Jun. Modeling and model predictive control of decomposition temperature in alumina precipitation based on disturbance prediction[J]. The Chinese Journal of Nonferrous Metals, 2013, 23(8): 2309-2315.
[17] DING Bao-cang, XI Yu-geng. A two-step predictive control design for input saturated Hammerstein systems[J].International Journal of Robust and Nonlinear Control, 2006, 16(7): 353-367.
[18] 康凤举. 现代仿真技术与应用[M]. 北京: 国防工业出版社, 2006: 351-352.
KANG Feng-ju. Modern simulation technology and application[M]. Beijing: National Defence Industry Press, 2006: 351-352.
(编辑 陈卫萍)
基金项目:国家自然科学基金重点项目(61134006);国家自然科学基金面上项目(61273169);国家自然科学基金青年科学基金项目(61105080);国家自然科学基金创新研究群体项目(61321003)
收稿日期:2013-10-09;修订日期:2014-04-21
通信作者:彭小奇,教授,博士;电话:0731-88836713;E-mail: pengxq@mail.csu.edu.cn

