DOI: 10.11817/j.issn.1672-7207.2019.01.008
��ͬ������Һѹ��ϵͳ������й©���Լ����ͬ������
���ף���־�壬Ī�Σ�����ӱ
(���ϴ�ѧ ���繤��ѧԺ�������ܸ�����������ص�ʵ���ң����� ��ɳ��410083)
ժҪ��Ϊ�о�2�������ڲ��ṹ�����������Һй©�����ϵͳ���ͬ��������Ӱ�죬��˫������ͬ������Һѹ��Ϊ������Һѹϵͳ�����ķ����ԣ���������ѧ������ѧ��������ѧ�ͻ���Һ��϶���ѧ���۽���ϵͳ�����״̬�»�-��-Һ--������ϵͳ���˶�ģ�ͣ�����Matlab/Simulink�Ը�ģ�ͽ��з����о���������ͬ������������϶��ϵͳͬ����Ӱ�졣�о����������������A��������϶��1=2.0��10-5 mΪ����������B��������϶��1Ϊ(2.0~2.6)��10-5 mʱ��ϵͳ�������������ܹ�ʵ��ͬ����������B��������϶������һ��Χʱ��ϵͳ����ʵ��ͬ������ģ��������ӳ�������ڲ��ṹ�����ϵͳ���ͬ��������Ӱ�죬��Ϊ��ͬ������Һѹ��еҺѹϵͳ������ṩ�ο����ݡ�
�ؼ��ʣ�Һѹ������ͬ�����֣�����й©����ϣ�ͬ��
��ͼ����ţ�TP391.9 ���ױ�־�룺A ���±�ţ�1672-7207(2019)01-0052-07
Coupled synchronization capability of motor internal leakage of hydraulic vibratory hammer system without synchronous gear
LUO Chunlei, TANG Zhiqing, MO Xin, CHEN Zhenying
(State Key Laboratory of High Performance and Complex Manufacturing,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The hydraulic vibratory hammer without synchronizing gears was studied to obtain the effects of the structural differences between the two motors on coupling synchronization of the two-eccentric-rotary system. Taking the nonlinearity of hydraulic system and soil into account, the motion model of the system composed of machinery, clectron, hydraulics and soil was established under the coupled vibration condition based on the theory of fluid mechanics, vibration mechanics, soil dynamics and electromechanical fluid coupling dynamics. By means of Matlab/Simulink, the effects of different clearance values on the system synchronization were analyzed. The results show that the system can achieve synchronization after seconds of oscillation when the piston pair clearance value of the motor A (��1=2.0��10-5 m) is taken as the benchmark and that of the motor B is within the range of (2.0-2.6)��10-5 m. But if the clearance value of the motor B is not in the range of (2.0-2.6)��10-5 m, the system can not achieve synchronization. The modeling and simulation correctly reflect the relationship between the internal structure of the motors and the system coupling synchronization, which can provide reference for the design of the hydraulic vibratory hammer.
Key words: hydraulic vibration hammer; without synchronizing gear; motor internal leakage; coupling; synchronization
Һѹ�����ھ��������͡���Ⱦ�١���Ч�ߺ�ʩ��������ǿ���ŵ㣬���㷺�����ڹ�ҵ�����ý�������·�������Լ�ˮ����ʩ��[1-2]��Ŀǰ��Һѹ����Ҫ����ͬ��������ʵ��ƫ�Ŀ��ͬ����ת�������ֽṹ�ձ�����ų��ֳ��汻�����������¹��ߺ�ͬ������ʹ�������̵�����[3]��������������Һѹ�����ͬ���о���Ϊ�ȵ㡣Ŀǰ�����Ƕ�Һѹ��ͬ�����о���Ҫ�����������á���еϵͳ�����Ʋ��Եȶ�Һѹ��ͬ�����Ե�Ӱ�죬������Һѹ������ڲ�й©��Һѹ��ͬ����Ӱ����о�����[3]���������÷��棬��ʤ��[4]����-�����ģ�ͣ��Դ��������µ���������Ӧ�����˷�����лС��[5]���о�������ʱ�������������ÿ�����1�����ɺ�1�����ᣬ�õȼ����Ի������Ƶذ����Է�������⡣��Һѹ���棬XU��[6]�о��������������ݻ���ʧ��Ч�ʱ仯�������õ����������¸�����ʧ�������仯�Ĺ�ϵģ�͡�л���Ե�[7]�о���б��ʽ����������й©ģ�ͣ��õ�����ż���õ�й©����ģ�ͣ��������[8]�ڵ���������й©�����Ļ����ϣ��о��������ڲ�����������й©������ܵ�й©������Ȼ���������������������������й©�о��У����������������˵�ѹ������Ϊ�������з����ġ�����Һѹ���У�Һѹ����е�������ϣ����︺��Ť�ص�ʱ���Ե��¸���ѹ����ʱ�̱仯�ģ���������й©��Ҳ��ʱ�̱仯��[9]��ͬʱ������������й©�⣬�����ڲ��������̺ͻ�ѥ��й©ͬ�����ɺ��ԣ����ԣ�������������ʽ�о�����й©�Ѳ�������[10]��Ϊ�ˣ����������������ڲ�й©���Խ���Һѹ���Ķ���ѧģ�ͣ���ʾ�����á���е�������︺�ء�ת����ѹ���������Ϊ������Matlab/Simulink������ֵ���棬�о����������Һѹ��ͬ�����������Ա�Ϊ��һ���о�Һѹ�������ͬ�����Ժ�Һѹ��������ṩ���ݡ�
1 ��ͬ������Һѹ��ϵͳ��ϵ�����ģ��
��ͬ�����ֵ�Һѹ��ϵͳ��Ҫ��˫����ƫ�Ļ�ת����1������2��3�͵ػ���4��ɣ���ͼ1��ʾ��
ͼ1�У�QΪ�����������1��2�ֱ�ΪҺѹ����1��2�����������m0Ϊƫ��������������y�� ��
�� �ֱ�Ϊ��ϵͳ��ֱ�����λ�ơ��ٶȺͼ��ٶȣ�rΪƫ�İ뾶��
�ֱ�Ϊ��ϵͳ��ֱ�����λ�ơ��ٶȺͼ��ٶȣ�rΪƫ�İ뾶�� ��
�� ��
�� �ֱ�Ϊƫ�Ŀ�1�Ľ�λ�ơ����ٶȺͽǼ��ٶȣ�
�ֱ�Ϊƫ�Ŀ�1�Ľ�λ�ơ����ٶȺͽǼ��ٶȣ� ��
�� ��
�� �ֱ�Ϊƫ�Ŀ�2�Ľ�λ�ơ����ٶȺͽǼ��ٶȣ�Rt��Rs�ֱ�Ϊ��������������������F(y)Ϊ��������������������Rt��Rs֮�ͣ�QL1��QL2�ֱ�Ϊ����1��2�ڲ�����й©����T1��T2�ֱ�Ϊ����1��2�������أ�TL1��TL2�ֱ�Ϊ����1��2�ĸ������أ�F1��F2�ֱ�Ϊƫ�Ŀ�1��2�ļ�������FΪF1��F2֮�͡�
�ֱ�Ϊƫ�Ŀ�2�Ľ�λ�ơ����ٶȺͽǼ��ٶȣ�Rt��Rs�ֱ�Ϊ��������������������F(y)Ϊ��������������������Rt��Rs֮�ͣ�QL1��QL2�ֱ�Ϊ����1��2�ڲ�����й©����T1��T2�ֱ�Ϊ����1��2�������أ�TL1��TL2�ֱ�Ϊ����1��2�ĸ������أ�F1��F2�ֱ�Ϊƫ�Ŀ�1��2�ļ�������FΪF1��F2֮�͡�
�����������1��2�ֱ�ΪҺѹ����1��2�����������ԳƲ��õ���Һѹ����ֱ�����2��ƫ�Ŀ��ת�������������ĺ������д���ҵ������2��Һѹ�����ڲ���Һй©���ڲ��죬ƫ�Ŀ�Ļ�ת�ǶȲ�������ȫһ�£��ڻ�ת�����У�2��ƫ�Ŀ�������λ�������2����תϵ����������ã���λ������Һѹ������ת���ڹ��ɹ��̵Ŀ�ʼ��������λ�ǰ��������ת�أ��ڸ���ѹ�������£���λ����ƫ�Ŀ����ܵļ��ٶȱ���λ��ǰ��ƫ�Ŀ����ܵļ��ٶȴ�ʹ����λ��ǰ��ƫ�Ŀ顰�ϡ�����λ����ƫ�Ŀ��˶���ֱ��2��ƫ�Ŀ�ת���������һ�¡��������ͬ������Һѹ��ʵ�����ͬ��������������
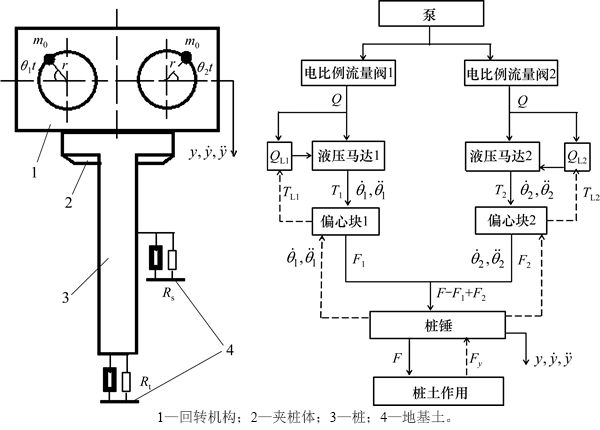
ͼ1 Һѹ��ϵͳ���ͬ������ģ��
Fig. 1 Coupling synchronization model of hydraulic vibratory hammer
2 ϵͳ���ͬ������ѧ��ģ
2.1 ��ϵͳ���˶��ַ���
��������ģ��ʱ�������¼���[10]��1) ��Һѹ������ϵͳ����Ϊ���ʸ��壻2) ��ģ�ͽ����Ǵ�ֱ�����ϵ���3) ��ϵͳ��ʱ�����ػ�����ϵͳ��������Ϊ����������ͼ��������˵���������ѹӦ����4) ���Ի�е������죬����ƫ�Ŀ��������ƫ�İ뾶��ȫһ�¡�Һѹ����ϵͳ����ģ����ͼ1��ʾ��
��Һѹ��ͬ����ʱ��ˮƽ����IJ����Ť��ɺ��Բ��ơ�����ֱ�����ϣ����Եõ������˶��ַ���[11]��

 (1)
(1)
 (2)
(2)
ʽ�У�MΪ��ϵͳ������(����������)�� ��
�� �ֱ�Ϊ�˺��������ϵ����
�ֱ�Ϊ�˺��������ϵ����
2.2 ��תϵ���ַ���
Һѹ����Һ���Ƶ�����ϵͳ��ͼ2��ʾ�����У�MΪҺѹ���BΪҺѹ�ã�BFΪ��Һ���Ƶ��ٷ���Һѹ����Һѹϵͳ��2����ȫ�ԳƵĵ�Һ���Ƶ�����ϵͳBF���ɡ�Һѹ���ĺ�����2��ƫ�Ŀ���ɣ��ֱ���2��Һѹ��������ƫ�Ŀ��ת���ڻ�ת�����У���������Ť�ز���Ҫ���ڸ���������������Ҫ�˷�ƫ�Ŀ�������Ħ�����ԡ�ϵͳ���ַ������£�
 (3)
(3)
ʽ�У�i=1,2��fi�ֱ�Ϊ����i�Ļ�ת��ϵ����ϵ����gΪ�������ٶȣ�TLiΪҺѹ����i����Ч���ء�
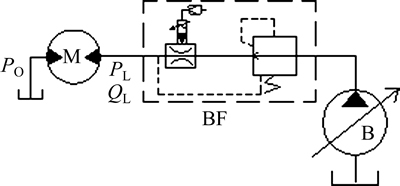
ͼ2 Һѹ����Һ���Ƶ�����ϵͳ
Fig. 2 Electrohydraulic control subsystem of hydraulic vibratory hammer
2.3 Һѹ�������ط�������������
���ͼ2��ʾϵͳ��Ϊ������ѧģ���Ƶ�����Ҫ��ϵͳ�������¼���[12]��1) Һѹ����ÿ������ǻ�ڵ��ݻ�����ģ��Ϊ������2) ����Ŀ���ѹ��ԶС�ڸ���ѹ�����ɺ��Բ��ơ�
Һѹ�������Ч���س����������������������⣬����Ҫ�˷�������Ĺ������غ���Һ��������
�������ء��������������ƽ�ⷽ��Ϊ
 (4)
(4)
�������������Ϊ
 (5)
(5)
ʽ�У�i=1,2��QLΪ˫�������������������qΪ����Ļ��������� ��
�� �ֱ�Ϊ����i�ĸ���ѹ����ѹ���仯�ʣ�QLiΪ����i�ڲ�����й©����VmiΪ����i����ǻ�����ǻ�����ݻ���
�ֱ�Ϊ����i�ĸ���ѹ����ѹ���仯�ʣ�QLiΪ����i�ڲ�����й©����VmiΪ����i����ǻ�����ǻ�����ݻ��� ΪҺѹ�͵ĵ���ģ����JiΪ����i���ת��������BiΪ����i���������ϵ����
ΪҺѹ�͵ĵ���ģ����JiΪ����i���ת��������BiΪ����i���������ϵ����
2.4 ���������ڲ�����Һ��й©����
ͼ3��ʾΪ���������������λ�ü�ͼ������1����2�ϵĿ��������������������������һ������ϼ�϶��������1�����˶�ʱ�����������η�϶���˴��ڽϸߵ�ѹ�ʹ�������ڵĸ�ѹ��ͨ�����η�϶�����ѹ�����ڣ��Ӷ�����й©[13]��������������˲ʱй©����Ϊ��
 (6)
(6)
 (7)
(7)
ʽ�У�i=1��2�� Ϊ����i������������˲ʱй©������dΪ������ֱ������1Ϊ�������ļ�϶��
Ϊ����i������������˲ʱй©������dΪ������ֱ������1Ϊ�������ļ�϶�� ΪҺѹ�͵Ķ����ȣ�
ΪҺѹ�͵Ķ����ȣ� Ϊ������ƫ���ʣ�lΪ�������������ĽӺϳ��ȣ�DΪ�����ķֲ�Բֱ����vΪ����������������˶��ٶȣ�
Ϊ������ƫ���ʣ�lΪ�������������ĽӺϳ��ȣ�DΪ�����ķֲ�Բֱ����vΪ����������������˶��ٶȣ� Ϊ����б�̵���ǡ�
Ϊ����б�̵���ǡ�
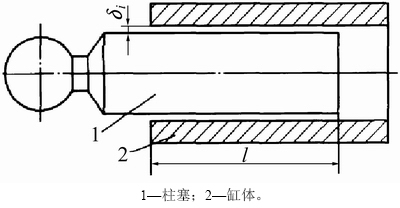
ͼ3 ����������λ�ü�ͼ
Fig. 3 Relative position of plunger and cylinder hole
�����й��Ҫ����������й©���𣬵������̺ͻ�ѥ��й©ͬ�����ɺ���[14]�������̡���ѥ�����ھ�ѹ֧�з�ʽ�����У���ѥ��й©����Ϊ
 (8)
(8)
ʽ�У� Ϊ����i�Ļ�ѥй©������i=1��2����2Ϊ��ѥ������Ĥ��ȣ�R1��R2�ֱ�Ϊ��ѥ��ͨ�Ϳװ뾶��
Ϊ����i�Ļ�ѥй©������i=1��2����2Ϊ��ѥ������Ĥ��ȣ�R1��R2�ֱ�Ϊ��ѥ��ͨ�Ϳװ뾶�� Ϊ��ѹ�ȣ��˴���Ϊ1��
Ϊ��ѹ�ȣ��˴���Ϊ1��
������й©����Ϊ
 (9)
(9)
ʽ�У�i=1, 2�� Ϊ����i��������й©��������3Ϊ����������Ĥ��ȣ�R8��R6�ֱ�Ϊ���������ͷ�����ڡ���뾶��R5��R7�ֱ�Ϊ���������ͷ�����ڡ���뾶��
Ϊ����i��������й©��������3Ϊ����������Ĥ��ȣ�R8��R6�ֱ�Ϊ���������ͷ�����ڡ���뾶��R5��R7�ֱ�Ϊ���������ͷ�����ڡ���뾶�� ��
�� �ֱ�Ϊ�����̾�ѹ֧�е��ڡ���Ƕȡ�
�ֱ�Ϊ�����̾�ѹ֧�е��ڡ���Ƕȡ�
�������й©Ϊ
 (10)
(10)
2.5 �����״̬�»�תϵ���˶�����
��ʽ(4)������ʽ�任���ɵ�
 (11)
(11)
��������(4)~(10)�����Է��̽�����ʽ�任�ɵ�
 (12)
(12)
�� ��
�� ��
��
 ��
��
 ��
��
 ����ʽ(11)����ʽ(12)���ɵ���-Һѹϵͳ����������»�תϵƫ�Ŀ��λ�Ƶķ���ʽ��
����ʽ(11)����ʽ(12)���ɵ���-Һѹϵͳ����������»�תϵƫ�Ŀ��λ�Ƶķ���ʽ��
 (13)
(13)
ʽ�У�i=1,2�� ��
��
 ��
��
 ��
��
3 �����״̬��ϵͳͬ�������������
��ʽ(13)�ɿ�������Һѹϵͳ�������ԣ�����Ľ�λ�ƺ�ת�ٲ�����������ڲ�����(������϶����Һ�ȱ仯)������������أ�����������ĸ���Ť����أ�������ĸ�������Һѹ���Ļ�еϵͳ�Լ�����������أ���ˣ�Һѹ���Ĺ������̾��������á���еϵͳ��Һѹϵͳ���ϲ���һ��������ʵ��ͬ���Ĺ���[15]������ѡ��Matlab/ Simulink������ģ�ͽ�����ֵ���棬��������Ա���Ŀ�����Ƶ�ZZY40A����ͬ������Һѹ���ͻ���HDA2FE80W61A11б��ʽ��������Ϊ��������1��
��ͬ��������϶ʱ2���������λ�̬���Էֱ��ͼ4~6����ͼ4~6�ɼ���������A��������϶Ϊ2.0��10-5 mʱ������B��������϶��2.2��10-5 m��2.6��10-5 m��2�������£�2���������λ������������Ծ�������1����С��ֵ������ó���ת�ٲ����������������Ҳ����������˵��2�������ܹ�ͬ��������������϶���Դ�ʱ����ǿ��(��ͼ5����ֵ��0.14����ͼ4����ֵ��0.08)��
��ͼ5�ɼ���������A��������϶Ϊ2.0��10-5 m������B��������϶����2.7��10-5 mʱ��2���������λ�ɢ����������A��B����ͬ����
2������ת�ٲ��λ���������Ĵ�����̬��������������Ա�����ѡ��Һѹ���������A����������϶Ϊ2.0��10-5 mʱ��ʵ��˫����ͬ��������������B��������϶��Χ��(2.0~2.6)��10-5 m֮�䡣
��1 Һѹ����ز���
Table 1 Parameters of hydraulic vibratory hammer
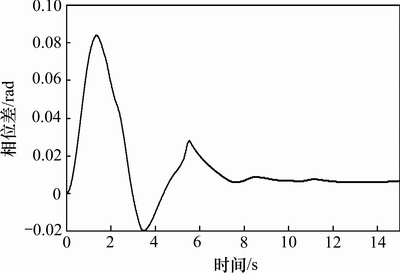
ͼ4 ��A=2.0��10-5 m����B=2.2��10-5 mʱ����λ��
Fig. 4 Phase difference when ��A=2.0��10-5 m and ��B=2.2��10-5 m
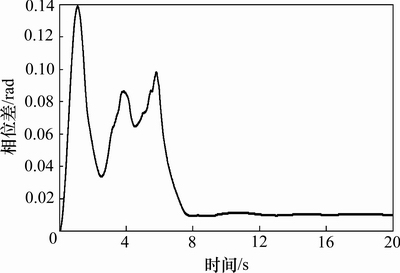
ͼ5 ��A=2.0��10-5 m����B=2.6��10-5 mʱ����λ��
Fig.5 Phase difference when ��A=2.0��10-5 m and ��B=2.6��10-5 m
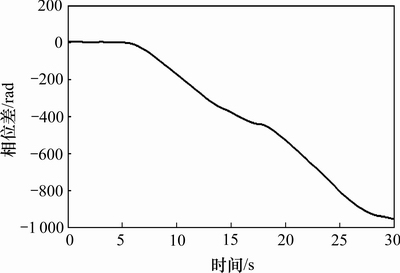
ͼ6 ��A=2.0��10-5 m����B=2.7��10-5 mʱ����λ��
Fig. 6 Phase difference when ��A=2.0��10-5 m and ��B=2.7��10-5 m
4 ����
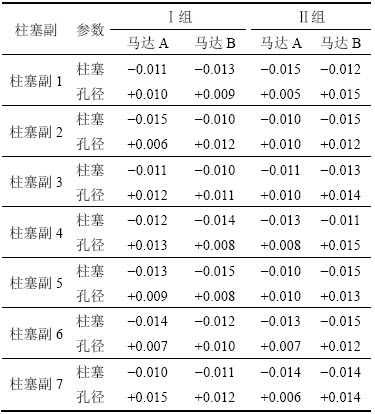
Ϊ����֤Һѹ��ͬ�������ܵ�Ԥ��������λ�ڳ�ɳ��վ�ĸ��ٴŸ�֧��ʩ�����ؽ����ֳ����顣����װ����Ҫ�ɱ���Ŀ�����Ƶ�ZZY40A����ͬ������Һѹ���Լ�����ϵͳ��ɣ�����Ϊ�ְ�������ѡ�䷽���õ�2�������2���������������϶���2��ʾ��ͨ��������ͬ�����2������� ��λ��ʵ������ϵͳ�����Ԥ�������жԱȣ���������ͼ7��ͼ8��ʾ��
��2 ���������������ߴ繫��
Table 2 Size tolerance of plunger pair mm
ͼ7 ����=20��10-6 mʱ����λ��������
Fig.7 Tested phase difference (����=2��10-6 m)
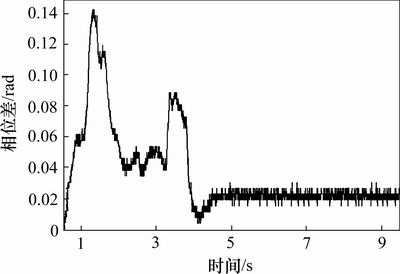
ͼ8 ����=27��10-6 mʱ����λ��������
Fig. 8 Tested phase difference (����=27��10-6 m)
��ͼ7�ɼ�����2���������������϶��ֵΪ20��10-6 mʱ��2��������λ��������ӹ������ȶ���0.015 rad������������ʵ��ͬ������ͼ8�ɼ���2���������������϶��ֵ����27�� 10-6mʱ����λ����ٷ�ɢ��������ʵ��ͬ�������������������Ԥ��������һ�¡�
5 ����
1) ���ǵػ������ͻ����ԣ�����ϵͳ�����״̬�»�-��-Һ--������ϵͳ���˶�ģ�ͣ���2�������ڲ��ṹ�������������й©�������ͬ������Һѹ��ϵͳ���ͬ��������Ӱ��������о����õ��ж�ͬ��������ϵͳ���״̬�µĻ�תϵ�˶����̡�
2) ������A��������϶��1=2.0��10-5 mΪ����������B��������϶��1Ϊ(2.0~2.6)��10-5 mʱ��ϵͳ�ھ������������ܹ�ʵ��ͬ����������B��������϶������һ��Χʱ��ϵͳ����ʵ��ͬ������ģ��������ӳ�������ڲ��ṹ�����ϵͳ���ͬ��������Ӱ�졣
�ο����ף�
[1] FAN Zenghui, WANG Yumei, XIAO hubang, et al. Analytical method of load-transfer of single pile under expansive soil swelling[J]. Journal of Central South University of Technology, 2007, 14(6): 575-579.
[2] YANG Xiaoli, ZOU Jinfeng. Displacement and deformation analysis for uplift piles[J]. Journal of Central South University of Technology, 2008, 15(3): 906-910.
[3] ����. Һѹ����������ѧ����Ƶ���ؿ����о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2005: 23-41.
LUO Chunlei. Dynamic studies and control of frequency and eccentric moment of hydraulic vibratory pile driver[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2005: 23-41.
[4] ��ʤ��. ����ͷ��������¾�����ѧ��Ϊ�о�[D]. �ɶ�: ���Ͻ�ͨ��ѧ��ľ����ѧԺ, 2008: 77-92.
CAO Shengmin. Research on static-dynamic mechanical behaviors of pier pile under vertical load[D]. Chengdu: Southwest Jiaotong University. School of Civil Engineering, 2008: 77-92.
[5] лС��. �������е�������õĶ���ѧ����[D]. ����: ������ѧ��ľ����ѧԺ, 2010: 56-78.
XIE Xiaojuan. Dynamic analysis of the pile-soil interaction in process of vibratory sinking piles[D]. Shenyang: Northeastern University. School of Civil Engineering, 2010: 56-78.
[6] XU Bing, HU Min, ZHANG Junhui, et al. Characteristics of volumetric losses and efficiency of axial piston pump with respect to displacement conditions[J]. Journal of Zhejiang University: Science A(Applied Physics & Engineering), 2016, 17(3): 186-201.
[7] л����, ����, �н�, ��. б��ʽ����������й©���ķ��������[J]. �����е, 2016, 44(2): 55-58, 70.
XIE Jianghui, LIU Jian, SHANG Jin, et al. Analysis and calculation of leakage of swashplate axial piston pump[J]. Fluid Machinery, 2016, 44(2): 55-58, 70.
[8] ������, ������, ʯ����. ������������������й©�����ļ��������[J]. Һѹ�������ܷ�, 2010, 62(10): 21-31.
FAN Fanghong, ZHONG Zhenlong, SHI Jinyan. Axial piston motor plunger pair of leakage flow calculation and analysis[J]. Hydraulics Pneumatics & Seals, 2010, 62(10): 21-31.
[9] ����ʤ, ӝҫ��, �Ź��. �����Ʋ�װʽ��������Һѹ�������Լ������о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(1): 77-83.
TANG Hesheng, YIN Yaobao, DU Guangjie. Study on characteristics of hydraulic motor with a threaded cartridge pressure relief valve[J]. Journal of Central South University (Science and Technology), 2014, 45(1): 77-83.
[10] LEE S H, KIM B I, HAN J T. Prediction of penetration rate of sheet pile installed in sand by vibratory pile driver[J]. KSCE Journal of Civil Engineering, 2012, 16(3): 316-324.
[11] �ű�. ���������õ�������������Ĥѹ�������о�[D]. ����: �㽭��ѧ��е����ѧԺ, 2009: 21-27.
ZHANG Bin. Study on virtual prototype and pressure characterstics of oil film for axial piston pump[D]. Hangzhou: Zhejiang University. School of Mechanical Engineering, 2009: 21-27.
[12] �����. ˮѹ���η�϶й©���Ե����ۺ�ʵ���о�[D]. �人: ���пƼ���ѧ��е����ѧԺ, 2012: 10-41.
YANG Xiufeng. Theoretical and experimental researches on leakage characteristics of water hydraulic annular clearance[D]. Wuhan: Huazhong University of Science and Technology. School of Mechanical Engineering, 2012: 10-41.
[13] ����. ���ڳ������ͻط��������������������о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2013: 17-51.
ZHANG Yi. Study of vibratory hammer's driveability based on the hysteretic nonlinear resistance[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2013: 17-51.
[14] ZHANG Xueliang, WENBangchun, ZHAOChunyu. Vibratory synchronization and coupling dynamic characteristics of multiple unbalanced rotors on a mass-spring rigid base[J]. International Journal of Non-linear Mechanics, 2014, 60(6): 1-8.
[15] BERGADA J M, KUMAR S, DAVIES D LI. A complete analysis of axial piston pump leakage and output flow ripples[J]. Applied Mathematical Modelling, 2012, 36(6): 1731-1751.
(�༭ �²ӻ�)
�ո����ڣ�2018-02-19�������ڣ�2018-04-22
������Ŀ(Foundation item)�������ص�ʵ���������о�����(zzyjkt2014-08)������ʡ��Ȼ��ѧ����������Ŀ(13JJ5008) (Project(zzyjkt2014-08) supported by the Autonomous Research Program of the National Key Laboratory; Project(13JJ5008) supported by the Natural Science Foundation of Hunan Province)
ͨ�����ߣ����ף���ʿ(��)�������ڣ�����Һѹ��е����Ƽ����о���E-mail: luoclok@163.com

