DOI�� 10.11817/j.issn.1672-7207.2019.12.008
��ʽ����������������ڻ����˵�����������ȶ��Է���
��ܳ�,������,Ф����
���人��ѧ �������еѧԺ������ �人��430072��
ժҪ:������ű���ȱ�ݼ����������һ���ںϳ������ܵ����ڻ����ˡ��������һ�ּ���ϼ�ͿĨ����������ȱ�ݱ�ǹ�����һ��ļ���ʽ����������Σ����һ�ֺ������ĥ��������ϼ���ѹ���������ڻ����ˣ��ٴΣ���Ի���������������ֱ������3�ֹ����������˶��ȶ������������������������͵��Ť��������Ϊ��ʽ���������ڻ����˵�����ṩ���ݡ��о�����������û������ܹ������ű�����ʵ���ƶ��ͳ������ܣ����������ĥ����ϼ�ͿĨ����������ȱ�ݱ�ǡ�
�ؼ���:���ڻ����ˣ�������������ʽ�������������ȶ��Է���
��ͼ�����:TP242.3 ���ױ�־��:A ���±��:1672-7207��2019��12-2989-09
Design and adsorption stability analysis of wall climbing robot based on wheeled magnetic adsorption for ultrasonic detection
LI��Jiechao, CAO��Like, XIAO��Xiaohui
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: For ferromagnetic wall surface defect detection, a wall climbing robot fused the function of ultrasonic detection was designed. Firstly, an integrated detection mechanism integrating coupling agent coating, ultrasonic detection and defect marking was proposed. Secondly, a wall climbing robot with wall grinding mechanism and coupling agent extrusion mechanism was designed. Finally, the stability conditions including adsorption force conditions and motor torque conditions were analyzed for transverse, vertical and hanging working conditions of the robot, which provided a basis for the design of wall climbing robot based on wheeled magnetic adsorption. The results show that the robot can perform the function of motion and ultrasonic detection including wall grinding, coupling agent extrusion, ultrasonic detection and defect marking.
Key words: wall climbing robot; magnetic adsorption; integrated ultrasonic inspection institution; stability analysis
����ʽ���ڻ������������ֻ����ˣ��������ƶ������˼�����������������������ܹ�Я�����ߴ����˹��ڸ�ǿ�ȡ��߷��յ�����½���̽�⡢������Ϳ���۹�������������Ρ����ӵ���ҵ�������˲���Σ�գ��������ҵЧ��[1-4]��������ű����ȱ�ݼ����ҵ��Ҫ�����ڻ����˾��пɿ�����������������������ںϡ�������ѧ�߶����ڻ����˵�������ʽ�������о���KOH��[5]����˾����뵯��������������ϵ����ڻ����ˣ�MINOR��[6]����˲���Ƿ�����ṹ��˫���Ĺؽ�����ʽ���ڻ����ˣ�TOHRU��[7]����˻����������ʽ�IJ���1�����̺�2�����������ֵ����ڻ����ˣ����������ʽ���ܱ�����ϵ����ƣ������������ܱ�������ȵ�Ӱ�졣DANIEL��[8]����˻��ڶ����Ͻṹ��Stickybot�������ڻ����ˣ��ܹ��ڹ⻬��ֱ������4 cm/s���ٶ����У��������������㡣��־���[9]����˻��ڸ�ѹ����ԭ�������ڻ����ˣ��������������ƣ��������ȶ��Բ��㡣�����������ڻ����˶Ա���Ҫ��ͣ�ͬʱ�ɱ�֤������������SHEN��[10]������Ĵ�ʽ�����������ڻ����ˣ����ؿɴﵽ30 kg���ϡ���������ʽ��������ʽ[11]�������Ĵ�ʽ[12]�����ż�϶ʽ[13]�������˵ĸ����������˶�����Ի���ì��[14]��������ʽ���ڻ������˶�����Ժã�����������������Ĵ�ʽ���ڻ����˸��������ã����˶�����Բ���ܶࣻ�����˵ĸ�����������������Ҳ����ì�ܣ�������ʽ���ڻ����˽������������ڳ����ϣ�����������˵ĵ��̳ߴ磬���ż�϶ʽ���ڻ����˽������������ڵ����ϣ������˻����˵ĵ��̳ߴ磬������������������ʽ���ڻ����˵ĸ��š���ˣ��ۺϿ��Ǹ����������˶�������Լ������������ѡ��������ʽ���ڻ����ˡ������ڻ��������⼼�����ںϷ��棬λ����[15]����˹���ͳ����㳬��������ڻ����ˣ�����ͼ[16]����˻�����������������ڻ����ˡ���Ȼ��Щ���ڻ�����ʵ�������⼼�����ںϣ������ڼ�ⲽ�費���������Ч�������ȱ�㣬ȱ�ٱ����ĥ����ϼ�ͿĨ�Լ�ȱ�ݱ�ǵȲ��裬��������Ƶı����ͼ���ʽ��δ���ķ�չ����������ű����ȱ�ݼ������Ϊʵ�ִ��������ڻ������볬����⼼�����ںϣ��������������һ���ںϼ���ʽ��������������ʽ���������ڻ����˽ṹ�����������˻������ڲ�ͬ�������ȶ����е������������͵��Ť�����������Ի������������������飬��֤����Ƶĺ����ԺͿ����ԡ�
1 ��ʽ����������������ڻ����˽ṹ����
1.1����ʽ����������������ڻ��������巽��
Ҫʵ�ֻ����������ű������ƶ������ҵ������������Ҫ��1) �ڱ���������˶���С�ͻ������»���2)�ںϱ���ȱ�ݼ��ܡ�
1) ������ʽ�������������ȶ����˶��������١����С������������ƣ�Ϊ��������������ű�������ƶ���ҵ��Ҫ����ƻ�����ʱ����������ʽ��
2) ��ⷽʽ���ڱ���ȱ�ݼ���У�������⼼����������ijɱ����㷺�ļ�ⷶΧ����Խϸߵļ�⾫�ȵ����ƻ�����ձ�Ӧ��[17]��Ŀǰ��������Ҫ���ô�ͳ��ѹ�糬����ʽ���������������ǣ�ʹ��ѹ�糬��������Ҫ�ܵ�һ�������ƣ��ֲڱ�����Ҫ������ĥ��ͿĨ��������ϼ������м�⡣
3) �����ҵ�����������ļ����ҵ���������ĥ����ϼ�ͿĨ����������ȱ�ݱ��4�����衣��Щ����Ҫͨ����Ӧ�Ļ�������ɣ���Ҫ�������������λ�ˣ���Ϊ��ĥ����ͿĨ���������ͱ����������ͬ�ģ���������ƻ�����ʱ���Ի����IJ��úͼ��������Ҫ����һ��Ի����˵�С�ͻ����ܴ�����á�
1.2������ʽ���������
Ϊ������������ڻ����˵����ܡ�ʹ�õķ����Ժ�ͨ���ԣ����Ҽ�С�����˳ߴ硢���ͼ����ҵ�����Ѷȣ�����˼���ʽ����������ͼ1��ʾ��
���������ռ���ʽ��˼·���ֱ������ͿĨģ�顢���ģ�顢���ģ��3�����ֲ�ʵ�ּ��ɡ�����ʽ�����������ڻ����˱���֮�⣬ͨ����˨ʵ��������˵��̵����ӣ����ڲ�ж��ά�ޡ������3�ֵ����Ĺ���װ�ã�����ʽ������������������Ŀ����С���ڵ�������ռ�ռ䣬�����������װ�öർ�»����˳ߴ����������ʵ�ֻ�����С�ͻ���ƣ�ͬʱ�����˻����ɱ���
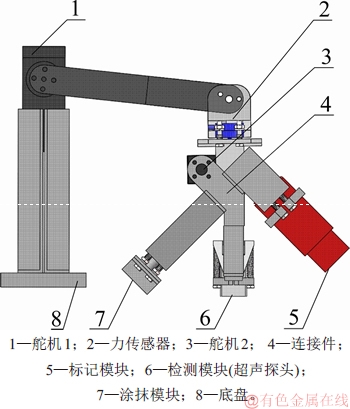
ͼ1������ʽ������ʾ��ͼ
Fig. 1��Schematic of integrated testing institution
����������˫�ؽڵ���ƣ������Զ��1��������תѹ���ؽ�ʵ�ּ������Ա�����������Զ��2��������ת�л��ؽ�ʵ��ͿĨ�����ͱ��3������ģ����л�������תѹ���ؽں���ת�л��ؽڵ��м����Ӵ���ư�װ����������ʵ�ּ������Ա���ѹ�������ȶ��Ϳɿأ���3������ģ���ĩ�����Ӵ����ñ�����Ӧ�������ṩ�Բ�ƽ�������Զ���Ӧ��������ͬʱ���ٶ���װ�ã������ڼ�С�������������ͳߴ磬�ҿ��Խ�һ�����ټ��������ɶȵĿ����������3������ģ����ͬһ�߶ȣ������1��ͬһ��λ���źż��ɶԶ��2ѡ���3��װ������������������ã�����ؼ�С�˼������Ŀ����Ѷȣ�ͬʱ��3������ģ�鴦�ڻ�����ͬһ�����ϣ���֤���������Ӵ������һ�¡�
ͿĨģ��ͨ�����ֳ���������һ�����ٶȽ���ϼ��������ܼ�ѹ����ϼ��У���������ϼ�ͿĨ�ڴ�ĥ���ı����ϡ���ϼ������Ϊ��ṹ��ʵ����ϼ���ֱ��ͿĨ��ͬʱ��ṹ����ЧͿĨ�����̽ͷ��������ͬ�Ա������ͿĨ������˼��Ч�ʡ����ģ��ͨ������������̽ͷ��ͿĨ����ϼ�������Ӵ���ʵ�ּ�⡣�ڼ�ⷢ��ȱ��ʱ�����ģ��Ը��������ȱ�ݱ�ǣ����������ά����ҵ��
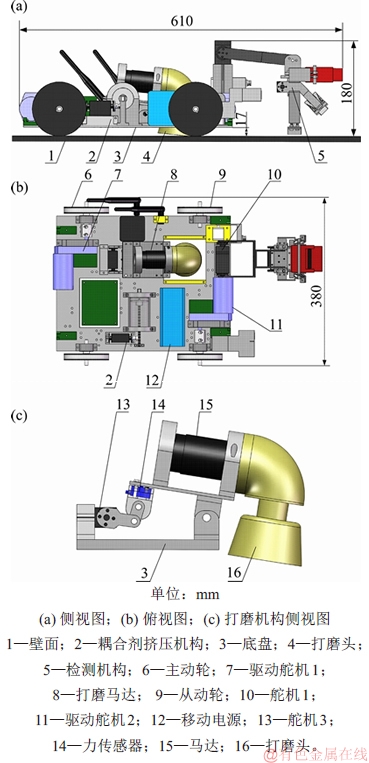
ͼ2�����ڼ�������ʾ��ͼ
Fig. 2��Diagram of wall climbing robot for detection
1.3�����ڻ����˱���ṹ���
������ʽ����������������ڻ��������巽��������ڻ�����ģ�ͣ���ͼ2��ʾ�������˲���2�����(���ģʽ)�������������Բ������ʽʵ�ֻ����������˶�������2���Ӷ�����Ϊ����֧����ʵ���������ȶ��Ӵ���ͬʱ2�������ֲ���ǰ��ƽ�еIJ��÷�ʽ�Լ�С�����˵ĺ���ߴ硣������Я���ƶ���Դ�Լ��ٻ����˸߿���ҵʱ�Ķ��⸺�أ�ͬʱ����˶�����ԣ�������ҵ�ռ䡣
�����˵�4���������������壬ͬʱ��������װ�úͻ������в����ڵ����ϣ���С�����˵��㸲���أ��Ա�֤�����˲��������䡢�㸲�ͻ��ƣ�ʵ�ֻ�����ȫλ�ð�ȫ�ɿ���ҵ��ÿ�����ֲ�������-������-����(��Ե������̥)�Ľṹ�Ա�֤�����������������������ƻ���ͬʱ�������ֿɲ��а�װ2�����ϵ�����������������������ĥ������������������غϣ�������ֻ��ǰ���ƶ�����ʵ�ֶԴ�ĥ����ļ����ҵ����ϼ���ѹͨ����������ij��ֳ���������ʵ�֡�
��ĥ������������������ʵ�ֶԱ���Ĵ�ĥ�����ö��������ͨ���ĸ˻�������ʵ�ִ�ĥͷ�Ա����������ͬʱ��ư�װ����������ʵ�ִ�ĥ�����Ա���ѹ�������ȶ��Ϳɿء����д�ĥͷ���ù�ҵ�ø�˿ˢ��ĥͷ����ĥ���������ּ�������öԽ�ĥ��������������
2 ��ʽ���������ڻ����������ȶ��Է���
�������ڼ����ҵʱ�����ܵ����ء���ĥװ�������Լ���ϼ������Ի��������ĵ�Ӱ�죬ͬʱ���ܵ���ĥ������������ѹ�����Ի����˷���������Ӱ�죬ʹ�������л�����㸲�����ơ����⣬���ֵ�������������Խ��Խ�á�����Խ�������ȶ��Ը��ߣ�����ʹ����Խ��͡�����������������ˣ��ڱ�֤�ȶ��Ե�ͬʱ��ʹ�����˾��нϸߵ�����ԣ��б�Ҫ�Ի������ڱ����ϵ��������з��������ṩ��ϵ��Ƶ���������[18]�����������͵����ѡ�;���ָ�����塣������[11]��ȣ����ĵ���ѧ�ȶ��Է������������ƶ�ƽ̨�������������Ǵ����ڻ�����ƽ̨�ϵ������������㲿�����������Ի��������ĵ�Ӱ���Լ������ҵʱ����Ի����˵ķ�����������Ժ�����ֱ��ת�������4����̬�����������˵������������͵��Ť����������̬������ͼ3��ʾ��
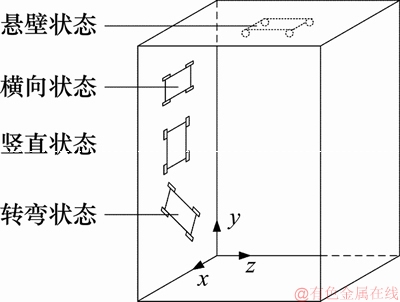
ͼ3����������̬ʾ��ͼ
Fig. 3��Diagram of robot state
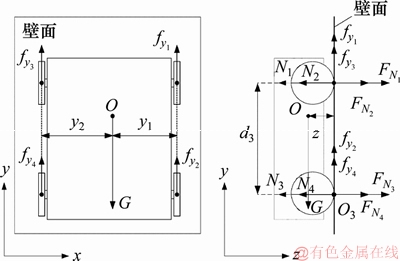
2.1��������̬
2.1.1����ֹ״̬��
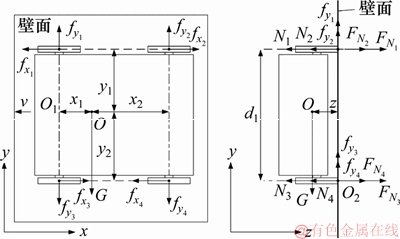
������̬�»����˾�ֹ����ͼ��ͼ4��ʾ�����У� Ϊ4�������ܵ���Ħ������Ni��
Ϊ4�������ܵ���Ħ������Ni�� (i=1, 2, 3, 4)�ֱ�Ϊ4�������ܵ���֧��������������4��������������ͬ�������
(i=1, 2, 3, 4)�ֱ�Ϊ4�������ܵ���֧��������������4��������������ͬ������� ��ʾ��GΪ�����˵�������OΪ�����˵����ģ�O1Ϊ�������õ㣬O2Ϊ�����õ㣻x1��x2��z�ֱ�Ϊ������������ǰ��������ߡ�����ľ��룻d1Ϊ�����������ֵĺ�����롣
��ʾ��GΪ�����˵�������OΪ�����˵����ģ�O1Ϊ�������õ㣬O2Ϊ�����õ㣻x1��x2��z�ֱ�Ϊ������������ǰ��������ߡ�����ľ��룻d1Ϊ�����������ֵĺ�����롣
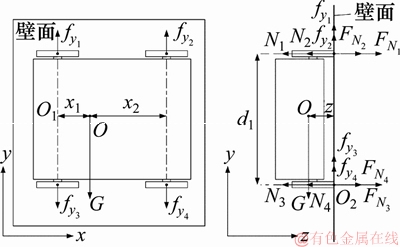
ͼ4��������̬�»����˾�ֹ״̬����ʾ��ͼ
Fig. 4��Transverse forces of robot in quiescent state
��ͼ4��֪�����˵�ƽ�ⷽ��ʽΪ
 (1)
(1)
ʽ�У� Ϊ��������y�������ܵĺ�����
Ϊ��������y�������ܵĺ����� ��
�� �ֱ�Ϊ������������O1��O2�����ء�
�ֱ�Ϊ������������O1��O2�����ء�
Ϊ��ֹ���ִ�ӦС�����Ħ����fmax�������Ħ����������ã��� ���档���⣬Ϊ��ֹ�������ⷭ�����ֵ�֧����NiӦ����0 N�����У�
���档���⣬Ϊ��ֹ�������ⷭ�����ֵ�֧����NiӦ����0 N�����У�
 (2)
(2)
ʽ�У���Ϊ���������ű���Ļ���Ħ����������ֹ״̬�£����Ǵ�ĥ������������ѹ�����Ի����˷���������Ӱ�죬������Ӧ���Ӹ�����F������ʽ(1)��ʽ(2)���ɵû������ȶ�������������Ϊ
 (3)
(3)
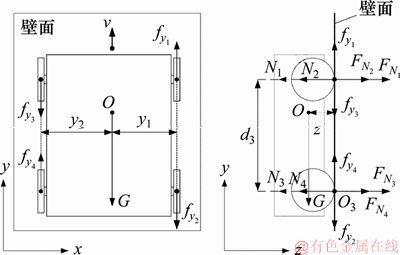
2.1.2���˶�״̬��
������̬�»������˶�����ͼ��ͼ5��ʾ���뾲ֹ״̬��ͬ���ǣ��������˶�ʱ�ܵ�x�����Ħ���� ������
������ ��
�� Ϊ�������ܵ�Ħ������
Ϊ�������ܵ�Ħ������ ��
�� Ϊ�Ӷ����ܵ�Ħ������v��ʾǰ������y1��y2�ֱ�Ϊ������ֽ��������ļ�ľ��롣
Ϊ�Ӷ����ܵ�Ħ������v��ʾǰ������y1��y2�ֱ�Ϊ������ֽ��������ļ�ľ��롣
ͼ5��������̬�»������˶�״̬����ʾ��ͼ
Fig. 5��Transverse forces of robot in movement state
��ͼ5�����������˵�ƽ�ⷽ��ʽΪ
 (4)
(4)
ʽ�У� Ϊ��������x�������ܵĺ�����
Ϊ��������x�������ܵĺ�����
������Ħ������Ҫ���� �����У�MΪ���Ť�أ�rΪ���ְ뾶��Ϊ��ֹ���ִ�����Ħ����ӦС�������⣬Ϊ��ֹ�������ⷭ�����ֵ�֧����NiӦ����0 N�����У�
�����У�MΪ���Ť�أ�rΪ���ְ뾶��Ϊ��ֹ���ִ�����Ħ����ӦС�������⣬Ϊ��ֹ�������ⷭ�����ֵ�֧����NiӦ����0 N�����У�
 (5)
(5)
�˶�״̬�£����迼�Ǵ�ĥ������������ѹ�����Ի����˷���������Ӱ�졣����ʽ(4)��ʽ(5)������ɵû������ȶ�������������Ϊ
 (6)
(6)
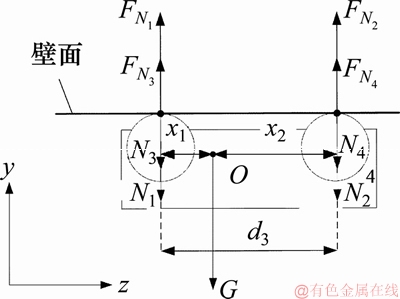
2.2����ֱ��̬
��ֱ��̬�»����˾�ֹ����ͼ���˶�����ͼ�ֱ���ͼ6��ͼ7��ʾ�����У�O3Ϊ�����õ㣻d3Ϊ������ǰ���������ľ��롣
ͼ6����ֱ��̬�»����˾�ֹ״̬����ʾ��ͼ
Fig. 6��Vertical forces of robot in quiescent state
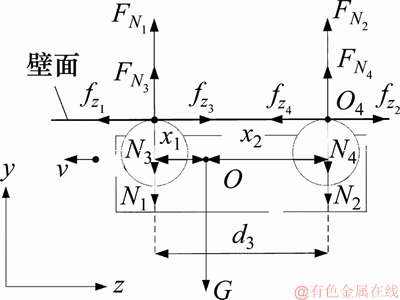
ͼ7����ֱ��̬�»������˶�״̬����ʾ��ͼ
Fig. 7��Vertical forces of robot in movement state
2.3��ת����̬
ת����̬�»����˾�ֹ����ͼ���˶�����ͼ�ֱ���ͼ8��ͼ9��ʾ�����У�O4Ϊ�����õ㣻l0Ϊ������O4��ľ��룬l1��l2��l4�ֱ�ΪĦ���� ��
�� ��
�� ��O4��ľ��룬m1��m2��m3�ֱ�Ϊ֧����N1��N2��N3��O4��ľ��룻
��O4��ľ��룬m1��m2��m3�ֱ�Ϊ֧����N1��N2��N3��O4��ľ��룻 Ϊ������������y��ļнǡ�
Ϊ������������y��ļнǡ�
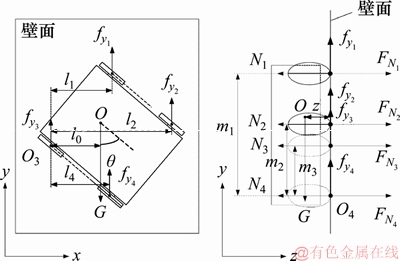
ͼ8��ת����̬�»����˾�ֹ״̬����ʾ��ͼ
Fig. 8��Turning forces of robot in quiescent state
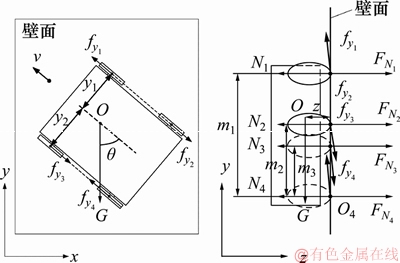
ͼ9��ת����̬�»������˶�״̬����ʾ��ͼ
Fig. 9��Turning forces of robot in movement state
2.4��������̬
������̬�»����˾�ֹ����ͼ���˶�����ͼ�ֱ���ͼ10��ͼ11��ʾ��
ͼ10��������̬�»����˾�ֹ״̬����ʾ��ͼ
Fig. 10��Hanging forces of robot in quiescent state
ͼ11��������̬�»������˶�״̬����ʾ��ͼ
Fig. 11��Hanging forces of robot in movement state
�ۺ�4����̬�µ������ȶ��Է������ɵû������ȶ��������������͵��Ť�������ֱ�Ϊ��
(7)
 (8)
(8)
3 ��ʽ����������������ڻ�������������
������ʽ����������������ڻ����˽ṹ�����Լ������ȶ��Է������������������͵��Ť����������Ʋ������������������ͼ12��ʾ������Ҫ�ṹ��������2��
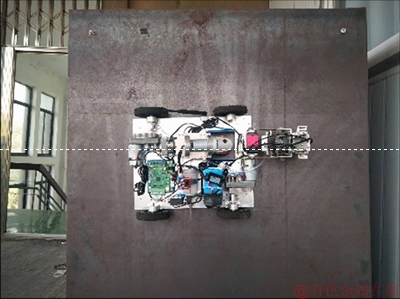
ͼ12����ʽ����������������ڻ���������
Fig. 12��Prototype of wall climbing robot based on wheeled magnetic adsorption for ultrasonic detection
Ϊ��֤��ʽ������������ڻ����˵ļ��������ԣ������ű����Ͻ����˻������˶������ȱ�ݼ�����顣
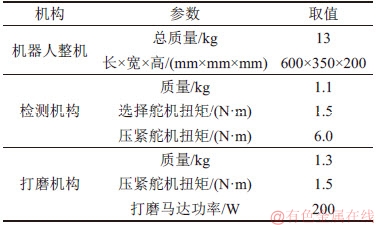
��2�����ڻ�����������Ҫ�ṹ����
Table 2��Structure parameters of wall climbing robot
3.1�����ڻ������˶�ʵ��
�������˶�������������˺����˶�����ֱ�˶���ת���˶��������˿����ȶ����������ű����ϡ�ͼ13(a)��ʾΪ�������˶�·��ʾ��ͼ���˶�����Ϊ����ֱֱ�С�����ת���ۺ���ֱ�С�����ת������ֱֱ��5���Ρ�ͼ13(b)��ʾΪ�˶������������ǽǶȦ��ı仯���ߣ���������˶�·��������Ӧ����ͼ13���Կ���������������������˵��˶��������仯���������ȶ����������ű����ϣ�û�з������䡢�A���ͻ��ơ���������������Ҫ���ܲ�������3��
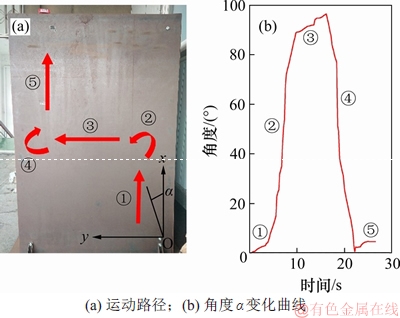
ͼ13�����ڻ������˶�����
Fig. 13��Diagram of motion path of wall climbing robot
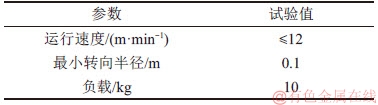
��3�����ڻ�����������Ҫ���ܲ���
Table 3��Performance parameters of wall climbing robot
3.2�����ڻ�����ȱ�ݼ������
������ȱ�ݼ��������������ĥ���顢��ϼ�ͿĨ���顢������������ȱ�ݱ�����飬���г����������ֻ������̽ͷ����������������ȱ�ݼ����������У����������ɵ�����̬��ͼ14��ʾ����ͼ14�ɼ��������˿���ʵ�ֱ����ĥ����ϼ�ͿĨ����������ȱ�ݱ��4������
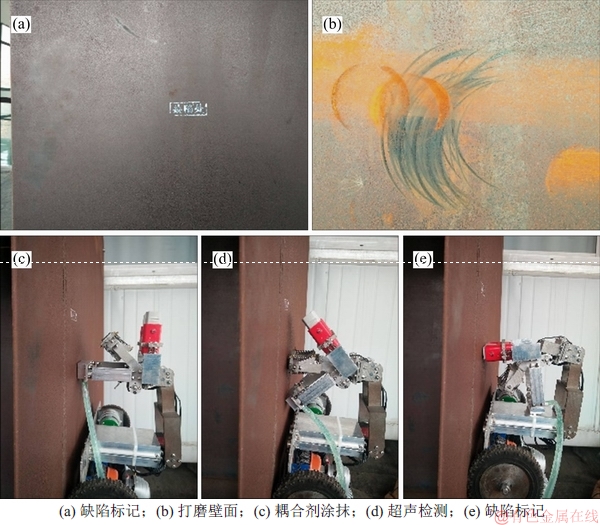
ͼ14��ȱ�ݼ������
Fig. 14��Test of detect detection
��ĥͷ�ͼ������Ա����ѹ������������ʽPID���ƣ������㷨��ͼ15��ʾ��
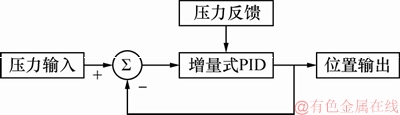
ͼ15������ʽPID����ͼ
Fig.15��Control chart of increment-PID
����������ѹ����Ϊ10 N����ĥ�����ͼ�������ѹ��������ͼ16��ʾ����ͼ16�ɼ���ʹ��PID���ƺ�ĥ����ѹ��������������22.3%���ﵽ��̬ʱ�������27.8%��������ѹ��������������33.0%���ﵽ��̬��ʱ�������22.2%���ɼ�PID���ƶ�������˵���ҵЧ���Լ������������ȶ���ҵ������Ч����
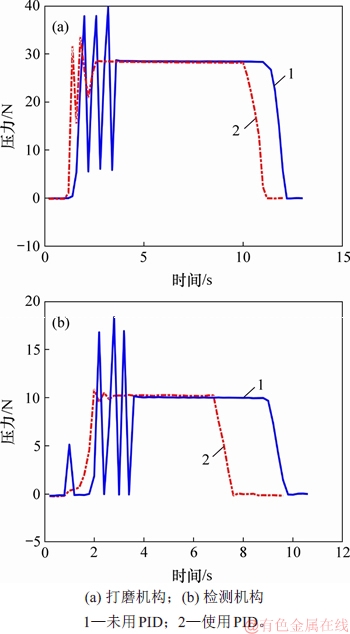
ͼ16��ѹ������
Fig. 16��Pressure curves
4 ����
1) ��Ʋ�ʵ����һ����ʽ������������ڻ����ˣ������ƶ�ƽ̨�ͼ�������С�ͺ����µ��ƶ�ƽ̨�����˻����˵�����Ժ����ռ䣬����ʽ�ļ�������С�˻����˵ijߴ�ͻ����Ŀ����Ѷȡ��û������������ű�����ʵ�ֻ������˶����ܣ���ɼ������
2) �ں�����ֱ������3����̬�£������˾�ֹ���˶�ʱ�����ȶ��������������͵��Ť������Ϊ���������ڻ����˵�����ṩ���������ݡ�
3) �����ű����Ͻ������˶������ȱ�ݼ�����飬ʵ���˻������˶������Լ������ij��������ҵ�����������ĥ����ϼ�ͿĨ����������ȱ�ݱ�ǣ�֤���������ʽ������������ڻ����˾��п����ԡ�
�ο����ף�
[1] HAN I H, YI H, SONG C W, et al. A miniaturized wall-climbing segment robot inspired by caterpillar locomotion[J]. Bioinspiration & Biomimetics, 2017, 12(4): 046003.
[2] ESTRADA M A, HAWKES E W, CHRISTENSEN D L, et al. Perching and vertical climbing: Design of a multimodal robot[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). New York, USA: IEEE, 2014: 4215-4221.
[3] SCHMIDT D, BERNS K. Climbing robots for maintenance and inspections of vertical structures: a survey of design aspects and technologies[J]. Robotics and Autonomous Systems, 2013, 61(12): 1288-1305.
[4] CHU B, JUNG K, HAN C S, et al. A survey of climbing robots: Locomotion and adhesion[J]. International Journal of Precision Engineering and Manufacturing, 2010, 11(4): 633-647.
[5] KOH K H, SREEKUMAR M, PONNAMBALAM S G. Hybrid electrostatic and elastomer adhesion mechanism for wall climbing robot[J]. Mechatronics, 2016, 35: 122-135.
[6] MINOR M, DULIMARTA H, DANGHI G, et al. Design, implementation, and evaluation of an under-actuated miniature biped climbing robot[C]//Proceedings 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York, USA: IEEE, 2000: 1999-2005.
[7] TOHRU M, HIDENORI I, TATSUYA T, et al. Vacuum-based wet adhesion system for wall climbing robots-lubricating action and seal action by the liquid[C]//IEEE International Conference on Robotics & Biomimetics. New York, USA: IEEE, 2009: 1824-1829.
[8] DANIEL S, SANGBAE K, MATTHEW S, et al. Directional adhesive structures for controlled climbing on smooth vertical surfaces[C]//IEEE International Conference on Robotics & Automation. New York, USA: IEEE, 2007: 1262-1267.
[9] ��־��, �����, ������, ��. С�ͱ��������ڻ������ƶ�ƽ̨�о�[J]. ��е����ѧ��, 2011, 47(3): 49-54.
ZHU Zhihong, LI Jize, PENG Jinmin, et al. Mobile platform of miniature wall climbing robot for building surface inspection[J]. Journal of Mechanical Engineering, 2011, 47(3): 49-54.
[10] SHEN W M, JASON G, SHEN Y J. Permanent magnetic system design for the wall-climbing robot[J]. Applied Bionics and Biomechanics, 2006, 3(3): 151-159..
[11] �¹⳽. �������������β�������˱����о�[D]. �人: �人������ѧ���繤��ѧԺ, 2014: 12-20.
CHEN Guangchen. Research on the inspecting robot for steam generator's secondary side[D]. Wuhan: Wuhan University of Technology. School of Mechanical and Electronic Engineering, 2014: 12-20.
[12] ���ܽ�, ����ˡ, �ο�, ��. �Ĵ�ʽ���ڻ����˴�������Ԫ�Ż������ʵ���о�[J]. ��е�����, 2018, 36(1): 69-74.
HU Shaojie, PENG Rushu, HE Kai, et al. Optimal design and experimental study of magnetic adsorption unit for crawler wall climbing robot[J]. Machinery and Electronics, 2018, 36(1): 69-74.
[13] ���ٳ�, ��ǿ, �����, ��. ���ڻ�������������װ�õ��Ż����[J]. �繤����ѧ��, 2006, 21(11): 40-46.
GUI Zhongcheng, CHEN Qiang, SUN Zhenguo, et al. Optimization of permanent magnetic adhesion device for wall-climbing robot[J]. Transactions of China Electrotechnical Society, 2006, 21(11): 40-46.
[14] ����ΰ, �����, ��ǿ, ��. ��������ʽ�����������ڻ���������[J]. ������, 2016, 38(1): 122-128.
CUI Zongwei, SUN Zhenguo, CHEN Qiang, et al. Wall climbing robot based on two-end adsorption for weld seam amending[J]. Robot, 2016, 38(1): 122-128.
[15] λ����. ����ͳ����㳬��������ڻ����˽ṹ�����������о�[D]. ����: ���ִ�ѧ���Ͽ�ѧ�빤��ѧԺ, 2018: 12-36.
WEI Leilei. Research on wall climbing wall robot structure and electrostatic adsorption in ultrasonic detection for railway vehicle welds[D]. Changchun: Jilin University. College of Materials Science and Engineering, 2018: 12-36.
[16] ����ͼ. ������ڻ����˼�����ϵͳ�о�[D]. ����: �廪��ѧ��е����ѧԺ, 2004: 15-30.
TIAN Lantu. Study on technology and system of oilcan testing wall-climbing robot[D]. Beijing: Tsinghua University. School of Mechanical Engineering, 2004: 15-30.
[17] ���. ��������е�ų���������⼼�����о�[D]. ������: ��������ҵ��ѧ�������̼��Զ���ѧԺ, 2010: 5-16.
JIANG Tao. Research on electromagnetic ultrasonic guided wave inspection in metal plates[D]. Harbin: Harbin Institute of Technology. School of Electrical Engineering and Automation, 2010: 5-16.
[18] LEE G, KIM H, SEO K, et al. MultiTrack: A multi-linked track robot with suction adhesion for climbing and transition[J]. Robotics and Autonomous Systems, 2015, 72: 207-216.
���༭ �Կ���
�ո����ڣ� 2019 -03 -01; �����ڣ� 2019 -05 -09
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675385) (Project(51675385) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�Ф���ͣ���ʿ�����ڣ��������ֻ������������������о���Email: xhxiao@whu.edu.cn

