不确定时滞系统ADRC控制
来源期刊:中南大学学报(自然科学版)2003年第4期
论文作者:夏元清 黄焕袍 韩京清
文章页码:383 - 385
关键词:自抗扰控制技术;跟踪微分器;扩张状态观测器;时滞;滤波
Key words:ADRC; tracking differentiator; extended state observer; time-delay; filtering.
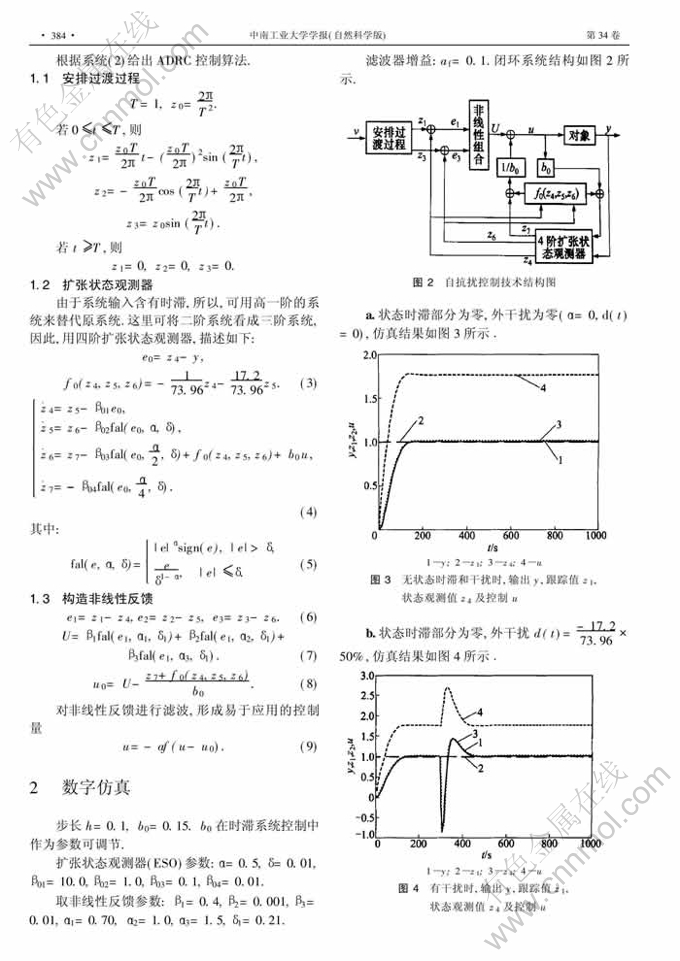
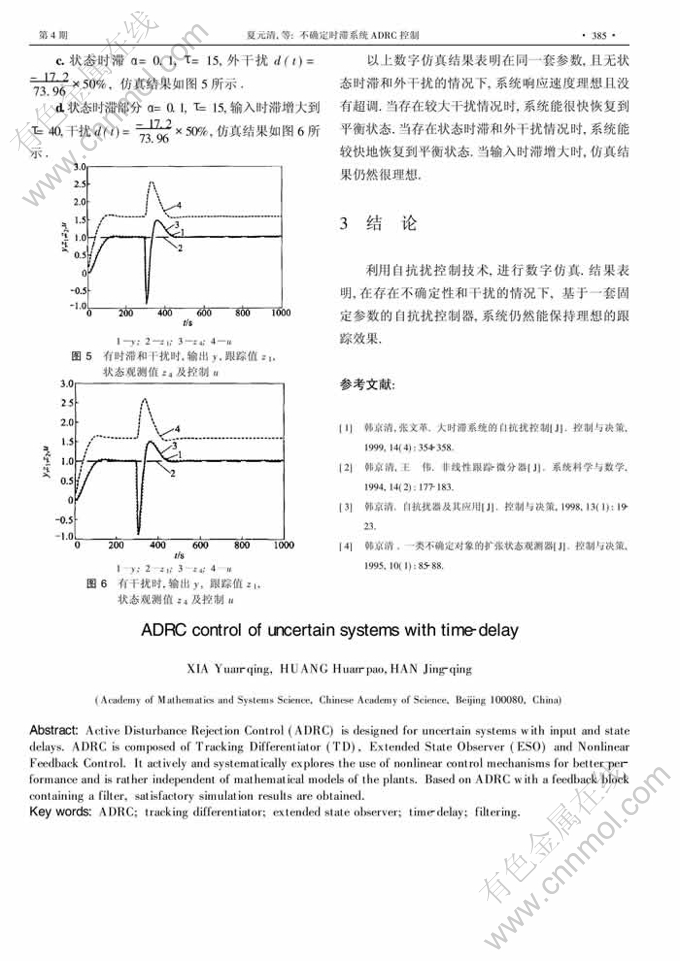
摘 要:针对不确定时滞系统,将输入时滞系统等价于高阶输入无时滞系统,利用自抗扰控制技术(ADRC),并在控制回路中串联一滤波器得到易于执行的控制量.自抗扰控制技术是由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性PID(即NPID)等组成,根据对象的输入输出信息来估计扰动并补偿,从而自动实现抑制扰动,并将被控对象化成积分器串联型以便构造理想的控制器.仿真结果表明:自抗扰控制技术以一套不变的参数,当存在外干扰、模型不确定、状态时滞、输入时滞、甚至输入时滞增加几倍时,系统仍然能够保持理想的跟踪效果.
Abstract: Active Disturbance Rejection Control (ADRC) is designed for uncertain systems with input and state delays. ADRC is composed of Tracking Differentiator (TD), Extended State Observer (ESO) and Nonlinear Feedback Control. It actively and systematically explores the use of nonlinear control mechanisms for better performance and is rather independent of mathematical models of the plants. Based on ADRC with a feedback block containing a filter, satisfactory simulation results are obtained.