基于前馈-反馈复合控制的盾构土压平衡控制
王林涛,龚国芳,杨华勇,侯典清
(浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州,310027)
摘要:为使盾构土压平衡控制系统既有较高的土压力控制精度又能及时消除推进速度波动对土压力产生的干扰,在现有土压平衡控制系统基础上,提出基于推进速度前馈-密封舱压力反馈的土压平衡控制系统。建立密封舱土压力数学模型,根据模型描述的推进速度、螺旋输送机转速和密封舱土压力之间的关系,通过推进速度前馈环节得到螺旋输送机转速相应的改变量,在推进速度波动对密封舱压力造成干扰之前进行补偿。同时,系统中的土压力反馈环节可以进一步消除其他干扰因素造成的土压力控制误差,提高系统稳态精度。利用在盾构实验台上采集的实验数据进行对比分析计算,验证土压力产生机理模型的有效性。结果表明,在前馈-反馈土压平衡控制系统中推进速度改变后螺旋输送机马达转速的响应时间约为0.5 s,而在反馈系统中约为2.5 s,前馈-反馈系统土压力控制最大相对误差为1.54%,而反馈系统为6.52%,因此证明当推进速度波动时,采用前馈-反馈控制的土压平衡控制系统具有更好的性能。
关键词:盾构掘进机;土压平衡控制;螺旋输送机;密封舱压力;推进速度;前馈-反馈控制
中图分类号:TU94+1 文献标志码:A 文章编号:1672-7207(2013)07-2726-10
Earth pressure balance control based on feedforward-feedback compound control
WANG Lintao, GONG Guofang, YANG Huayong, HOU Dianqing
(State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Abstract: In order to compensate the earth pressure disturbance in working chamber caused by thrust speed variation and improve the precision of earth pressure balance (EPB) control system, a new EPB control system was designed based on thrust speed feedforward and earth pressure feedback control. The mathematical model of earth pressure in working chamber was proposed. According to the relationship among thrust speed, screw conveyor speed and earth pressure described in the earth pressure model, the adjustment of screw conveyor speed can be generated by the feedforward control loop and the effect of thrust speed variations could be eliminated before the earth pressure in working chamber being influenced. Meanwhile, the earth pressure feedback control loop could further reduce the earth pressure error to improve the system stable precision. Experiment was carried out on the shield machine test rig and the calculating result was compared with the experimental value to verify the earth pressure model. The calculating results show that the response time of EPB control system is reduced from 2.5 s to 0.5 s and the maximum relative error is decreased from 6.52% to 1.54% under the effect of feedforward control. Therefore, the performance of the EPB control system in shield tunneling machine is greatly improved.
Key words: shield tunneling machine; earth pressure balance control; screw conveyor; earth pressure in working chamber; thrust speed; feedforward-feedback control
土压平衡盾构是一种通过控制密封舱压力以维持开挖面稳定的隧道掘进机械。密封舱压力是土压平衡盾构施工过程中的重要参数,它直接影响开挖面稳定和盾构前方地表变形,密封舱压力的快速精确控制是实现盾构土压平衡控制的关键[1-3]。许多学者针对密封舱压力控制理论及方法进行了研究。胡国良等[4]对盾构土压平衡实现过程进行解释,并提出改变推进速度或螺旋输送机转速2种土压控制模式;王洪新等[5-6]在提出进土量与排土量计算模型和实验数据分析的基础上,揭示螺旋输送机转速、推进速度与土压平衡状态的关系;Peila等[7]通过在土压平衡盾构机实验台开展实验,研究了密封舱压力、螺旋输送机压力和刀盘扭矩之间的关系;Yang等[8]提出采用PID控制器控制密封舱土压力的方法,并通过实验数据验证该方法能够获得较高的土压力稳态控制精度;上官子昌等[9-11]在考虑盾构机与土体之间的耦合作用基础上,建立了一种密封舱压力控制机理模型,提出密封舱压力优化控制算法,并通过数值仿真验证该方法有效性和精确性。目前,盾构土压平衡控制主要是采用密封舱压力直接反馈闭环控制方法,研究主要集中在如何改变反馈控制算法以提高土压力控制精度,并没有对掘进过程中影响密封舱压力的干扰因素单独进行补偿,因此,本文作者在密封舱压力反馈闭环控制的基础上,增加前馈环节,将推进速度变化引起的密封舱压力波动提前进行补偿,提高密封舱压力的控制精度和响应速度,介绍了盾构掘进机土压平衡控制的实现过程,建立了密封舱压力产生机理的数学模型,分析了当前土压平衡控制方法存在的不足,并进行改进,提出了基于推进速度前馈-密封舱压力反馈的盾构密封舱压力控制方法,并通过对实验及计算数据的对比分析,验证了密封舱压力机理模型与前馈-反馈控制方法的有效性。
1 密封舱土压力产生机理与土压平衡原理
图1所示为土压平衡盾构掘进机工作原理图。土压平衡盾构主要由盾壳、刀盘、螺旋输送机、推进装置等构成。盾构掘进机中部设有胸板,它与刀盘、盾壳以及螺旋输送机形成密封舱。在盾构掘进过程中,推进液压缸驱动盾构向前推进,刀盘切削下的土体通过刀盘上的开口进入密封舱并充满密封舱和螺旋输送机的内部空间,然后通过螺旋输送机排出盾构。进入密封舱内的土体在前方原始土层和胸板的共同挤压作用下产生密封舱压力。
在盾构掘进过程中通常会对切削下的土体进行改性,使渣土具有良好的塑性流动性,从而可以使渣土充满整个密封舱并能通过螺旋输送机顺利排土[2, 12]。在此前提下,将整个密封舱看作一个封闭容腔,单位时间内进入该容腔渣土体积取决于该盾构推进速度,排出容腔渣土体积取决于螺旋输送机的结构参数和转速,由此,密封舱的渣土流量连续性方程为
 (1)
(1)
式中:qi为进入密封舱的渣土流量;qo为排出密封舱的渣土流量;Cepm为密封舱的外泄漏系数;pe为密封舱土压力;po为外界压力;Ve为密封舱容积;βe为渣土体积弹性模量。

图1 土压平衡盾构工作原理示意图
Fig.1 Working principle of EPB shield tunneling machine
进入密封舱的渣土流量为
 (2)
(2)
式中:D为盾构外径;v为推进速度。
排出密封舱的渣土流量为
 (3)
(3)
式中:ηs为螺旋输送机排土效率;d1为螺旋输送机叶片直径;d2为螺旋轴半径;ns为螺旋输送机转速;Ts为螺旋输送机叶片螺距。
马达转速与螺旋输送机转速关系为
 (4)
(4)
式中:nm为螺旋输送机驱动液压马达转速;ig为螺旋输送机减速机减速比。
忽略从密封舱向外泄漏的渣土体积,联立以上各式,可以得到盾构密封舱压力增量表达式为
 (5)
(5)
因此,盾构密封舱土压力为
 (6)
(6)
式中:peo为盾构开挖面上的环境土压力。
由式6可知,在开挖面环境土压力为定值的情况下,密封舱压力是由盾构推进速度及螺旋输送机转速共同决定的。因此,理论上存在2种密封舱压力调整模式,即:控制螺旋输送机转速的排土控制模式和控制推进速度的进土控制模式[13]。图2给出了这2种操作模式的框图。当密封舱压力小于土压力设定值时,系统会增加推进速度或减小螺旋输送机转速;反之,当密封舱压力大于土压力设定值时,控制系统会减小推进速度或提高螺旋输送机转速;当二者相同时,不进行调整盾构继续掘进。
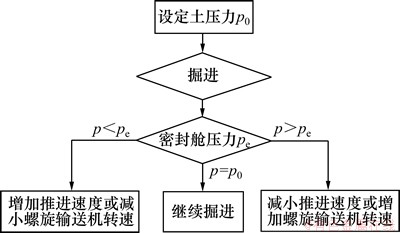
图2 盾构土压平衡控制模式框图
Fig.2 Diagram of EPB control mode
盾构土压平衡控制原理如图3所示。在盾构掘进过程中,密封舱内土压传感器实时测量土压力,根据土压力测量值与给定值差值,确定推进速度和螺旋输送机转速的调整量,通过改变进入推进液压缸或螺旋输送机液压马达流量改变盾构推进速度或螺旋输送机转速,从而完成土压力控制闭环,实现土压平衡控制。推进液压缸上装有位移传感器,将所测位移信号微分后反馈到控制器完成推进速度闭环控制。螺旋输送机上装有转速传感器,将所测转速信号反馈到控制器完成螺旋输送机转速闭环控制。密封舱压力闭环可以保证土压力稳态控制精度,推进速度和螺旋输送机转速闭环可以提高推进速度与输送机转速控制精度。
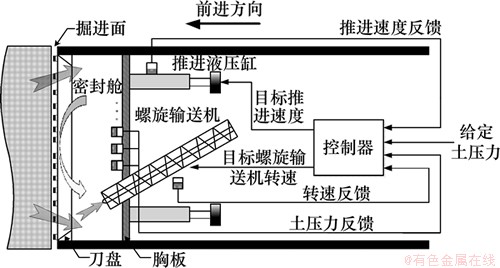
图3 盾构土压平衡控制原理
Fig.3 Schematic diagram of EPB control
2 螺旋输送机电液控制系统及数学模型
虽然理论上存在2种密封舱压力调整模式,但是实际盾构的推进速度通常是根据当前土层条件确定的,同时还要兼顾盾构姿态调整等其他方面的要求。因此,在实际盾构掘进中并不能仅根据土压平衡的要求实时调整推进速度,更多情况下采用调整螺旋输送机转速改变排土量来实现土压平衡控制。为满足螺旋输送机转速控制要求,设计了一种采用转速反馈的螺旋输送机电液控制系统[8, 13]。该系统为变量泵控定量马达系统,图4所示为实验盾构机设计的螺旋输送机液压系统原理图。
在该液压系统中,带有压力切断功能的电控比例变量泵2在电机1的驱动下给整个系统供油,驱动螺旋输送机马达7转动和输送机出泥口闸门液压缸9的运动。马达7通过齿轮减速机驱动螺旋输送机,因此通过改变马达7的转速和转动方向即可实现螺旋输送机的调速与换向。当土压平衡状态发生改变需要对螺旋输送机转速进行调整时,控制系统改变变量泵2控制电流,使泵的排量发生改变,从而改变进入马达7的液压油流量,实现马达调速。马达输出轴上装有力矩转速传感器8,可以实时测量马达转速与输出力矩,转速数据反馈给控制系统,完成转速闭环控制,实现马达精确调速。出泥口闸门开口程度可以通过改变液压缸9的位移进行调整,位移传感器10用于检测闸门开口程度。系统中电磁换向阀6和11分别用于改变螺旋输送机转动方向和闸门运动方向,压力表3和压力传感器5用于显示和检测系统工作压力,溢流阀4为防止系统过载的安全阀。
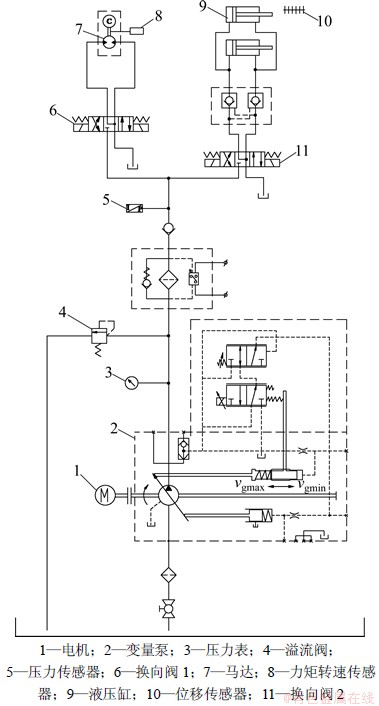
图4 实验盾构螺旋输送机液压系统原理图
Fig.4 Schematic diagram of hydraulic control system of test screw conveyor
为能够对采用不同土压平衡控制方式的盾构密封舱压力进行分析计算,建立了螺旋输送机电液控制系统数学模型。变量泵中三通比例阀的流量方程 可写为
可写为
 (7)
(7)
式中: 为流量系数;xv为滑阀阀芯位移;w为阀口面积梯度;ps为控制系统供油压力;pc为液压缸控制腔的控制压力;pa为变量泵壳体压力。
为流量系数;xv为滑阀阀芯位移;w为阀口面积梯度;ps为控制系统供油压力;pc为液压缸控制腔的控制压力;pa为变量泵壳体压力。
变量缸控制腔的流量连续性方程为
 (8)
(8)
式中:Ah为变量缸控制腔活塞面积;xp为变量缸位移(当泵处于最小排量状态时规定为0 m);Cic为液压缸内泄漏系数;βo为液压油有效体积弹性模量;Vc为液压缸控制腔容积
 (9)
(9)
式中:V0为液压缸控制腔的初始容积,通常情况下Ahxp远小于V0[14],则联立式(8)和(9)可得:
 (10)
(10)
变量机构的力矩平衡方程为
 (11)
(11)
式中:As为反馈液压缸活塞面积;Fk为反馈弹簧作用力;ls为反馈液压缸对斜盘作用力臂;lc为控制液压缸对斜盘作用力臂;J为变量机构等效转动惯量;θ为斜盘倾角;Bc变量机构黏性阻尼系数;G为变量机构扭转弹簧刚度;Tp为其他负载力矩。
三通比例阀阀芯力平衡方程
 (12)
(12)
 (13)
(13)
 (14)
(14)
式中:FEM为比例电磁铁输出力;Fpre 为阀芯弹簧的预紧力;kv为三通阀复位弹簧刚度;m为阀芯质量;c为阻尼系数;KFI为比例电磁铁电流力增益;i为比例电磁铁输入控制电流;xs为反馈活塞位移(当泵处于最小排量状态时规定为0)。因为θ通常小于20°,因此可以得到[15]
 (15)
(15)
变量泵的排量方程为
 (16)
(16)
式中:Dp为变量泵的排量;Kp为变量泵的流量梯度。
变量泵的流量连续性方程为
 (17)
(17)
式中:np为变量泵的转速;Cip为变量泵的内泄漏系数;p1为泵出口压力;Cep为变量泵的外泄漏系数。
螺旋输送机液压马达高压腔流量连续性方程为
 (18)
(18)
式中:Dm为液压马达排量;θm为螺旋输送机马达转角;Cim为马达的内泄漏系数;Cem为马达的外泄漏系数。
螺旋输送机液压马达和负载的力矩平衡方程为
 (19)
(19)
 (20)
(20)
 (21)
(21)
式中:Jt为液压马达和负载折算到马达轴上的总惯量;Bm为黏性阻尼系数;Gm为负载弹簧刚度;Tm为作用在马达轴上的负载力矩;Jm为液压马达转动惯量;JL为螺旋输送机转动惯量;ηm为减速机机械效率;TL为螺旋输送机负载扭矩。
如图5所示,根据式(7)~(21)可得螺旋输送机电液控制系统的模拟结构图,根据该图可得螺旋输送机转速控制方程 。
。
3 基于密封舱压力反馈的土压平衡控制系统(FC)
基于密封舱土压平衡控制基本原理,密封舱压力直接反馈土压平衡控制方法的基本过程为测量土压力,确定土压力误差,调整螺旋输送机转速。
图6所示为基于土压力反馈的土压平衡控制方法框图,图中is为变量泵起点控制电流。该系统为位置反馈系统,位置反馈系数Gbf可以通过下式确定
 (22)
(22)
式中:imax为变量泵最大控制电流;iemax为土压传感器最大输出电流;kpei为土压传感器压力-电流系数。
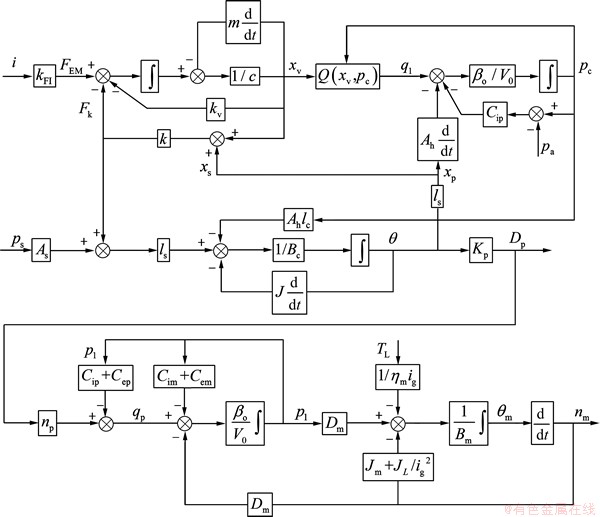
图5 盾构螺旋输送机电液控制系统模拟结构图
Fig.5 Flow chart of crew conveyor electro-hydraulic control system
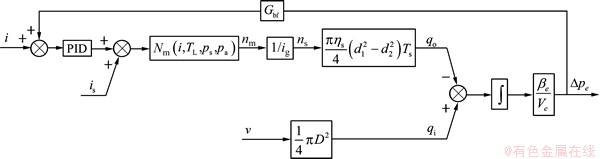
图6 采用反馈控制密封舱土压平衡控制系统结构图
Fig.6 Block diagram of EPB control system with feedback control
由于该系统对土压力直接进行闭环控制,因此,当盾构在均匀地层平稳推进时可以获得较高的土压力控制精度,但是由于反馈系统本身为偏差控制系统,只有当实际土压力与土压力设定值出现偏差后才开始调整作用,受控变量经历一个偏离设定值的过渡过程,且对于盾构推进系统和螺旋输送机系统这类大惯量系统,过渡过程会更加明显。因此,当掘进环境发生变化盾构推进速度发生波动时,采用反馈控制的土压平衡系统必然会存在较大的控制误差。为了解决对推进速度干扰补偿的滞后性,减小实际土压力偏移量,提出基于前馈-反馈控制的土压平衡控制方法。
4 基于前馈-反馈控制的土压平衡控制系统(FFC)
在实际盾构掘进过程中,推进速度是由多方面因素共同决定的,即推进速度并不能为配合土压平衡系统随时调整,因此,作为密封舱压力的决定性因素之一,推进速度便由盾构土压平衡系统理论上的控制因素变为实际上的干扰因素。
前馈控制的基本概念是测取进入过程的干扰,并按其信号产生合适的控制作用去改变操纵变量,对受控变量在受到干扰前进行补偿,从而使受控变量维持在设定值[16]。盾构推进液压缸上装有位移传感器,该传感器可以实时检测工作液压缸的输出位移,将采集到的位移信号进行微分处理可以得到盾构推进速度,由此得到速度前馈控制系统的输入信号。但是在单一的前馈控制系统中,由于不存在受控变量的反馈,因此,当受控变量与设定值出现偏差时,系统无法获取偏差信息并进行校正。为解决前馈控制的这一局限,设计了基于推进速度前馈-密封舱压力反馈的土压平衡控制方法,这样既发挥了前馈校正作用及时的优点,又可以获得较高的土压力稳态控制精度。图7所示为基于前馈-反馈控制的土压平衡控制系统框图。该系统采用静态前馈控制方式,利用密封舱进土量与出土量平衡关系,可以推导出静态前馈系数Gff,根据式(5)及前馈-反馈控制系统框图7可得:
 (23)
(23)
为使该控制系统更加适用于实际盾构土压平衡控制,前馈系数中的螺旋输送机转速控制方程可用比例环节替代,则静态前馈系数Gff表达式为
 (24)
(24)
 (25)
(25)
式中:kin为螺旋输送机电液控制系统等效电流转速系数;nmmax为螺旋输送机驱动液压马达最高转速。
5 实验与计算结果分析
为验证密封舱压力产生机理模型,对比分析2种土压平衡控制系统性能,在直径1.8 m土压平衡综合实验台上进行相关实验研究。如图8所示,该实验台主要由长8.6 m的模拟土箱、直径为1.8 m的缩尺土压平衡盾构组成。该土箱内径为4 000 mm,可通过橡胶囊袋充水加压对箱内土体进行加载,最大施加土压为0.04 MPa。模拟土箱内预埋有土压传感器、水压传感器,可实时测量掘进过程中箱内水土压力。模拟盾构通过一组装有位移传感器的液压缸推进,渣土通过螺旋输送机排出,密封舱内装有土压传感器,可实时测量密封舱压力[13, 15, 17]。
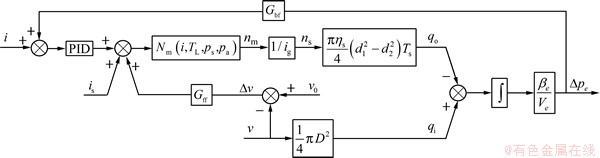
图7 采用前馈-反馈控制密封舱土压平衡控制系统结构图
Fig.7 Block diagram of EPB control system with feed forward and feedback control
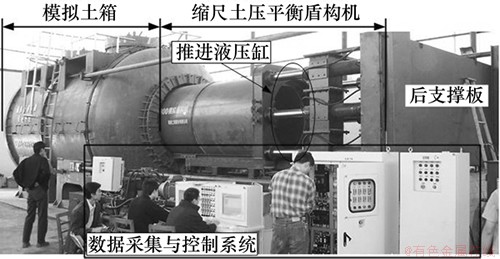
图8 直径1.8 m土压平衡盾构试验台
Fig.8 Shield machine test rig with diameter of 1.8 m
5.1 密封舱土压力产生机理模型验证
准确计算盾构密封舱压力是对比2种盾构土压平衡控制系统性能的前提,为验证式(6)所描述的密封舱土压力产生机理模型,将该模型的计算结果与在盾构实验台上得到的实验数据进行对比。
实验台的主要参数见表1,计算过程中使用的其他参数(如推进速度和螺旋输送机转速)均采用盾构实验台相应推进段的实验数据。图9所示为密封舱土压力计算值与实验值曲线。从图9可以看出:采用式(6)计算得到的密封舱土压力与实验土压力非常接近,局部存在较小差值,式(6)对渣土特性的线性化和填土的均匀化处理是引起计算误差的原因。准确的机理模型是获得合适的前馈系数的前提条件。
表1 实验台主要参数
Table 1 Main technical parameters of test rig
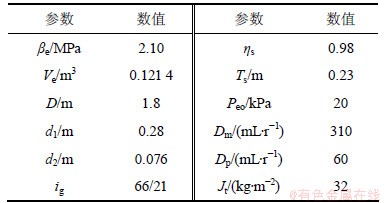
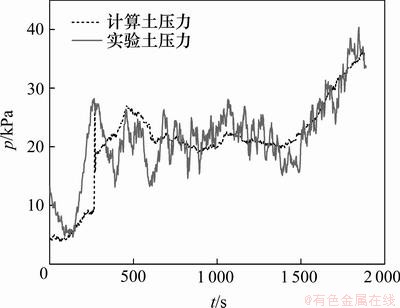
图9 计算密封舱土压力和实验密封舱土压力对比
Fig.9 Compasion curves of calculating and test earth pressure
5.2 推进速度突变条件下土压平衡控制系统性能对比
在计算过程中,盾构推进速度变化规律如图10所示。可见,在80 s之前,盾构以40 mm/min的恒定速度平稳推进,在推进80 s时,由于盾构遇到突变载荷或其他原因,推进速度减为20 mm/min,在105 s之后,推进速度提高到40 mm/min继续平稳推进。图11所示为在推进速度变化过程中螺旋输送机驱动变量泵的输入电流变化情况。从图11可以看出,当推进速度发生变化时,反馈系统控制电流的响应明显滞后于前馈-反馈控制系统,反馈系统控制电流上升时间t2远大于前馈-反馈系统上升时间t1时间,同时反馈系统的超调量也远大于前馈-反馈控制系统的超调量。由此可以看出,前馈-反馈系统在前馈环节的作用下,在推进速度改变后可以较快的做出响应,前馈-反馈控制系统与反馈控制系统相比可以更快更好的适应推进速度突变。
图12所示为在推进速度变化时的盾构密封舱压力及其与设定土压力的相对误差曲线。从图12可以看出,采用反馈控制系统的盾构密封舱压力波动比采用前馈反馈系统的要大得多,前者最大有5%的相对误差,而采用前馈-反馈控制的盾构密封舱压力仅有1%左右的相对误差,因此,采用前馈-反馈控制的盾构密封舱土压平衡控制系统在推进速度波动的掘进过程中可以获得更加出色的控制性能。
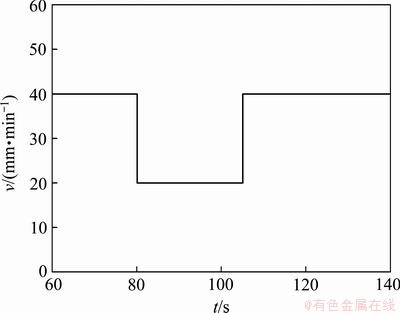
图10 推进速度变化规律曲线
Fig.10 Curves of shield machine thrust speed
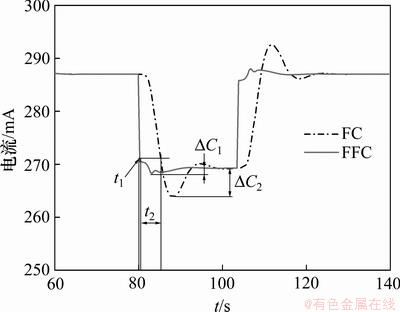
图11 变量泵输入控制电流变化曲线
Fig.11 Input currents of variable displacement pump
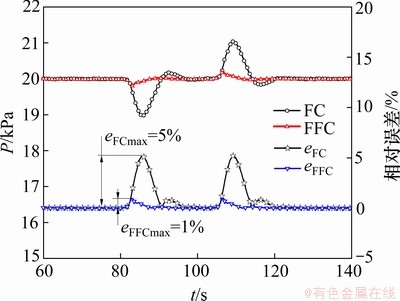
图12 不同控制方式下密封舱土压力及其相对误差曲线
Fig.12 Earth pressures in working chamber and relative errors under different control systems
5.3 实际掘进过程中土压平衡控制系统性能对比
当推进速度发生阶跃波动时,2种系统在土压平衡控制方面表现出不同的性能,但在实际工况条件下,前馈-反馈系统是否具有更好的土压平衡控制效果仍需验证。图13所示为采用反馈控制实验盾构土压平衡控制系统在某实验掘进段内的推进速度、PID控制器输出控制电流和螺旋输送机转速曲线。从图13可以看出,由于土箱内土层的不均匀,推进速度会发生波动,推进速度波动造成密封舱土压力改变,因此土压力反馈信号也会发生改变。为了消除土压力偏差,PID控制器的输出电流发生改变以调整螺旋输送机转速,从而减小土压力偏差。根据式(6)可知,推进速度对密封舱压力的影响经历一个积分环节,因此,密封舱压力曲线比推进速度曲线更光滑,PID控制器的输出电流及螺旋输送机转速曲线与推进速度曲线相比均比较光滑,但是由于在反馈控制系统中经过了一个冗长的干扰量转换与传递过程,螺旋输送机马达转速的响应时间滞后推进速度2.5 s,较慢的响应速度使系统过渡时间加长,增大土压力误差。
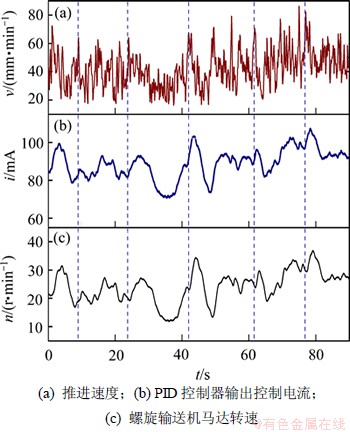
图13 采用反馈控制密封舱土压平衡控制系统推进速度、控制电流和螺旋输送机马达转速曲线
Fig.13 Curves of thrust speed, control current and screw conveyor driving motor speed with feedback control
图14所示为采用前馈-反馈控制实验盾构土压平衡控制系统在某实验掘进段内的推进速度、前馈环节控制电流、变量泵输入控制电流、PID控制器输出控制电流和螺旋输送机转速曲线。从图14可以看出,前馈环节产生的变量泵的控制电流与推进速度是几乎是同步变化的,仅存在非常小的延迟,因此,螺旋机马达转速也会及时调整以对由于推进速度改变可能造成的土压力改变提前进行补偿,即当推进速度改变时,液压马达转速几乎同时进行调整,因此密封舱压力波动很小,从图14也可以看出:PID控制器的输出电流非常平稳,由此也可以推断密封舱压力波动很小。整个系统中,螺旋输送机马达转速的响应时间滞后推进速度0.5 s,较快的响应速度保证干扰量可以及时的到补偿。

图14 采用前馈-反馈控制密封舱土压平衡控制系统推进速度、控制电流和螺旋输送机马达转速曲线
Fig.14 Curves of thrust speed, control current and screw conveyor driving motor speed with feed forward and feedback control
图15所示为采用2种控制方式下密封舱土压力及其相对误差曲线。从图15可以看出:采用前馈-反馈控制的土压平衡控制系统土压力波动较小,与设定值相比,其最大相对误差仅为1.54%。采用反馈控制密封舱土压平衡控制系统的土压力波动较大,与土压力设定值相比,最大相对误差为6.52%。由此可见,推进速度前馈环节的引入可以提高了密封舱压力控制精度。同理,可以考虑将其他可测干扰通过前馈控制系统进行补偿。

图15 不同控制方式下密封舱土压力及其相对误差曲线
Fig.15 Earth pressures in working chamber and relative errors under different control systems
6 结论
(1) 前馈-反馈土压平衡控制系统比采用单一反馈的土压平衡控制系统对推进速度变化产生的干扰有更快的响应速度。根据推进速度阶跃变化条件下的计算结果,推进速度改变后,在前馈环节的作用下,前馈-反馈土压平衡控制系统中螺旋输送机马达转速的响应时间仅为0.5 s,而在反馈系统中约为2.5 s。
(2) 前馈-反馈土压平衡控制系统能够更好地消除推进速度波动产生的干扰和减小密封舱土压力波动,获得更高的土压力控制精度。在实验掘进条件下,前馈-反馈系统土压力控制最大相对误差为1.54%,而反馈系统为6.52%。
参考文献:
[1] 魏纲, 黄志义, 徐日庆, 等. 土压平衡盾构施工引起的挤土效应研究[J]. 岩土力学与工程学报, 2005, 24(19): 3523-3527.
WEI Gang, HUANG Zhiyi, XU Riqing, et al. Study on soil-compacting effects induced by earth pressure balance shield construction[J]. Chinese Journal of Rock Mechanics and Engineering, 2005, 24(19): 3523-3527.
[2] 施虎, 龚国芳, 杨华勇, 等. 盾构掘进土压平衡控制模型[J]. 煤炭学报, 2008, 33(3): 343-346.
SHI Hu, GONG Guofang, YANG Huayong, et al. Control model of earth pressure balance for shield tunneling[J]. Journal of China Coal Society, 2008, 33(3): 343-346.
[3] YANG Huayong, SHI Hu, GONG Guofang. Motion control of thrust system for shield tunneling machine[J]. Journal of Central South University of Technology, 2010, 17(3): 537-543.
[4] 胡国良, 龚国芳, 杨华勇. 盾构掘进机土压平衡的实现[J]. 浙江大学学报: 工学版, 2006, 40(5): 874-877.
HU Guoliang, GONG Guofang, YAN Huayong. Realization of earth pressure balance for shield tunneling machine[J]. Journal of Zhejiang University: Engineering Science, 2006, 40(5): 874-877.
[5] 王洪新, 傅德明. 土压平衡盾构掘进的数学物理模型及各参数间关系研究[J]. 土木工程学报, 2006, 39(9): 86-90.
WANG Hongxin, FU Deming. A mathematical model and the related parameters for EPB shield tunneling[J]. China Civil Engineering Journal, 2006, 39(9): 86-90.
[6] 王洪新, 傅德明. 土压平衡盾构平衡控制理论及试验研究[J]. 土木工程学报, 2007, 40(5): 61-68.
WANG Hongxin, FU Deming. Theoretical and test studies on balance control of EPB shields[J]. China Civil Engineering Journal, 2007, 40(5): 61-68.
[7] Pella D, Oggeri C, Vinai R. Screw conveyor device for laboratory tests on conditioned soil for EPB tunneling operation[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2007, 33(12): 1622-1625.
[8] YANG Huayong, SHI Hu, GONG Guofang, et al. Earth pressure balance control for EPB shield[J]. Sci China Ser E-Tech Sci, 2009, 52(10): 2840-2848.
[9] 上官子昌, 李守巨, 孙伟, 等. 土压平衡盾构机密封舱土压力控制方法[J]. 煤炭学报, 2010, 35(3): 402-405.
SHANGGUAN Zichang, LI Shouju, SUN Wei, et al. Controlling earth pressure of head chamber of earth pressure balance(EPB) shield machine[J]. Journal of China Coal Society, 2010, 35(3): 402-405.
[10] 上官子昌, 李守巨, 栾茂田, 等. 土压平衡盾构机密封舱土压力优化设置问题[J]. 建筑技术, 2009, 40(12): 1086-1090.
SHANGGUAN Zichang, LI Shouju, LUAN Maotian, et al. Optimal determination of earth pressure in head chamber of earth pressure balance shield machine[J]. Architecture Technology, 2009, 40(12): 1086-1090.
[11] 李守巨, 陈禹臻, 曹丽娟, 等. 土压平衡盾构机密封舱压力控制机理模型研究[J]. 岩土工程学报, 2011, 33(1): 34-38.
LI Shouju, CHEN Yuzhen, CAO Lijun, et al. Mechanism model of pressure control of head chamber in earth-pressure balanced shield tunneling[J]. Chinese Journal of Geotechnical Engineering, 2011, 33(1): 34-38.
[12] 上官子昌. 土压平衡盾构机密封舱压力控制机理模型及其实验研究[D]. 大连: 大连理工大学土木水利学院, 2011: 95-96.
SHANGGUAN Zichang. Mechanism model and experimental investigation of chamber pressure control for earth pressure balance shield[D]. Dalian: Dalian University of Technology. School of Civil Engineering, 2011: 95-96.
[13] 胡国良. 盾构模拟试验平台电液控制系统关键技术研究[D]. 杭州: 浙江大学机械与能源工程学院, 2006: 20-21.
HU Guoliang. Research into electro-hydraulic control system for a simulator test rig of shield tunneling machine[D]. Hangzhou: Zhejiang University. School of Machinery and Energy Engineering, 2006: 20-21.
[14] 王春行. 液压控制系统[M]. 北京: 机械工业出版社, 2008: 41-43.
WANG Chunxing. Hydraulic control system[M]. Beijing: China Machine Press, 2008: 41-43.
[15] 刘怀印. 盾构模拟试验平台电液控制系统关键技术研究[D]. 杭州: 浙江大学机械工程学系, 2012: 42-46.
LIU Huaiyin. Research on energy saving technology for cutter head system drive system of shield tunneling machine[D]. Hangzhou: Zhejiang University. Department of Mechanical Engineering, 2012: 42-46.
[16] 李玮华, 杨秦建. 基于单片机的多轴运动数控系统跟随误差补偿器的设计[J]. 机床与液压, 2011, 39(4): 16-19.
LI Weihua, YANG Qinjian. Research on tracking deviation compensator for multi-axis CNC system based on single-chip computer[J]. Machine Tool & Hydraulics, 2011, 39(4): 16-19.
[17] WANG Lintao, GONG Guofang, SHI Hu, et al. A new calculation model of cutter head torque and investigation of its influencing factors[J]. Sci China Tech Sci, 2012, 55(6): 1581-1588.
(编辑 赵俊)
收稿日期:2012-08-18;修回日期:2012-11-10
基金项目:国家高技术研究发展计划(“863”计划)项目(2012AA041808);教育部2012年度博士研究生学术新人奖资助项目(2012)
通信作者:龚国芳(1963-),男,浙江慈溪人,教授,从事盾构掘进机电液控制系统研究;电话:0571-87952500-8019;E-mail: gfgong@zju.edu.cn

