精确定点归航翼伞控制系统的研究
李春,吕智慧,黄伟,沈超
(北京空间机电研究所,北京,100076)
摘要:采用嵌入式归航控制器、双天线GPS定位定向仪、无线数传机、大力矩直流伺服电机等设备,自主设计归航控制、落点预置、遥控通讯和GPS数据处理等软件,研制具有自动归航和人工遥控归航2种工作模式的精确定点归航翼伞控制系统。其中,在自动归航模式下系统根据GPS收到的位置航向等信息控制翼伞向预设目标点靠近;而在人工遥控的模式下,由地面操作人员通过地面控制计算机发送无线遥控指令控制翼伞归航。对该控制系统进行系统地面联试和负载试验的验证。研究结果表明:本研究提供的控制系统满足了可控翼伞定点归航的需要。
关键词:精确定点;翼伞;GPS;归航
中图分类号:TP273.5 文献标志码:A 文章编号:1672-7207(2012)04-1331-05
Guidance navigation & control system for precision fix-point homing parafoil
LI Chun, L? Zhi-hui, HUANG Wei, SHEN Chao
(Beijing Institute of Space Machine & Electricity, Beijing 100076, China)
Abstract: Using embedded navigation & control device, double-antenna GPS device, unwire data transporter and big moment direct current electromotor, navigation control software, landing point pre-setting software, remote control & communication software, GPS data converse software was designed independently. Precision fix-point homing parafoil control system which has two working modes of automatic homing and manual remote control was developed. In the automatic homing mode, system controls parafoil approaching the pre-setted target point. And in the manual remote control mode, ground operating person sends remote control instructions to operate parafoil returning using ground control computer. And the control system was validated by association test and load test, respectively. The result indicates that the control system our research provided fulfilled the demand of controllable parafoil fix-point homing.
Key words: precision fix-point; parafoil; GPS; homing
返回式航天器返回过程的最终阶段是安全着陆,这也是这类航天器整个飞行任务的最终阶段。随着航天返回与着陆技术的迅速发展,对航天器回收与着陆技术的精度要求也越来越高,从而对降落伞系统提出了具有滑翔能力和可操作性的技术要求。美国Natick试验室正在研制一种APADS(Advanced precision airborne delivery systems,先进精确空投系统)[1-3]。APADS的归航控制系统称为GPADS(Guided parafoil air delivery system,自动导航控制单元)。其主要设备包括:机载计算机、军用GPS接收机及其它传感器。其内部归航控制软件中设计的归航控制律可根据综合的测量信息发出控制指令,实现精确空投。北京空间机电研究所从20世纪80年代开始先后开展了60 m2可控翼伞及小型可控翼伞归航控制技术的研究。早期60 m2可控翼伞控制方式采用简单的径向归航,由机载自动归航仪根据地面信标机发出的信号方向来确定翼伞的运动方向,从而控制翼伞向目标点靠近。地面信标机信号覆盖范围较小,且存在盲角,在实际应用中有很大的局限性。在2002-2005年,北京空间机电研究所研制了小型可控翼伞回收系统[4-5],其导航控制采用GPS自动导航设备或通过数传设备进行地面手动遥控。但该翼伞回收系统的伞衣面积和载荷能力都较小,实际应用范围较窄。在此,本文作者采用双天线GPS定位定向仪、大力矩直流伺服电机、甚高频无线数传机、分段归航算法控制软件,研发了一套80 m2翼伞可用,有效载荷范围5~10 kN,着陆精度300 m以内的精确归航翼伞控制系统,展现出广泛的应用 前景。
1 系统组成及工作过程
精确定点归航翼伞控制系统由机载和地面2部分构成,其组成结构如图1和2所示。其中,机载部分包括归航控制器、翼伞状态信息采集装置、操纵执行装置、无线传输装置等。地面部分包括地面无线传输装置、地面控制计算机等。该控制系统设置有自动引导归航和人工遥控归航2种工作方式。在自动归航方式时,工作人员在地面将预先选定的目标点及风场信息置入归航控制器。在翼伞回收阶段,归航控制器根据翼伞状态信息采集装置接收到的定位、航向、姿态等信息依据归航控制算法进行解算,并向伺服操纵机构输出控制指令操纵翼伞左右伞绳的收紧和放松,从而使翼伞转向并逼近目标点。同时,控制系统还将接收到的翼伞状态信息实时转发到地面,由地面计算机进行显示和储存。在人工遥控方式时,地面工作人员通过地面控制计算机和无线传输装置将遥控指令发送给归航控制器,控制系统根据指令完成翼伞的归航控制。
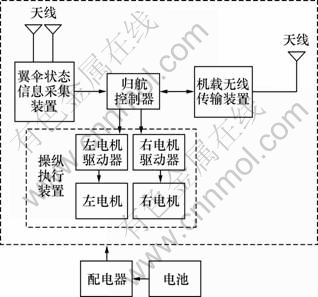
图1 机载设备组成框图
Fig.1 Frame paragraph of air-launched equipments
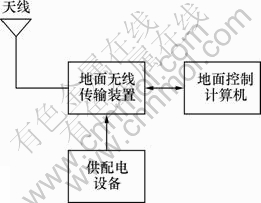
图2 地面设备组成框图
Fig.2 Frame paragraph of ground equipments
2 系统硬件设计
2.1 归航控制器及其控制方式设计
归航控制器是归航控制系统的核心部件,由CPU模块、运动控制模块、编码器计数模块、电源模块和固态盘组成(见图3)。其结构采用堆栈式连接:模块之间通过上层的针和下层的孔相互咬合连接,不需要背板和插槽,具有极好的抗震性能。归航控制器对操纵执行装置的控制方式有以下3种[6-8]:串口命令方式、模拟量电压方式、高频脉冲信号方式。串口命令方式为控制器直接输出串口命令到驱动器控制电机的运动,由于串口的数据传输有时会出现延迟,不适合于对实时性要求很高的系统。模拟量电压方式为控制器输出模拟量电压控制电机的速度环,编码器将电机位置信息反馈给控制器,控制器侦测到电机即将到位后,再输出反向电压驱动电机作减速运动直到止动。在这种控制方式下电机的力矩、速度和位置环控制需要控制器作复杂的运算,且误差大,精度低。高频脉冲信号方式为控制器输出两路信号:一路为高频脉冲信号,一路为方向信号。脉冲信号的频率控制电机的转速,脉冲的个数控制电机的转动位置,方向信号控制电机的转动方向。通过比较编码器反馈的脉冲数和控制器发出的脉冲数还可以验证控制的正确性和精确度。可见,高频脉冲信号控制方式相比其他2种方式更加简便精确且实时性更强,故本研究所述归航控制器选用了该方式。
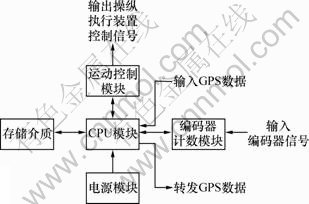
图3 归航控制器组成框图
Fig.3 Frame paragraph of navigation & control device
2.2 翼伞状态信息采集装置、操纵执行装置和无线传输装置设计
翼伞状态信息采集装置采用双天线GPS定位定向仪。其内部集成了2个GPS定位处理芯片,通过同时观测和处理主天线和从天线的GPS载波信号得出2个天线相对位置,进而计算出机体的航向。该定位定向仪内部还集合了陀螺仪和倾角传感器,可静态及动态测量方向和俯仰角度,并在GPS失锁时提供数分钟的方向信息。
操纵执行装置采用大力矩直流伺服电机。本文可控翼伞所需峰值操纵力约为927 N,峰值转矩约为12 Nm,所需转速小于300 r/min。所选电机转速为300 r/min时,其线性工作区截至力矩为17 N・m,大于翼伞操纵所需峰值力矩,满足设计要求。
系统无线传输装置包括机载和地面2部分,分别选用广泛用于GPS RTK(Real-time kinematics,载波相位动态实时差分)、DGPS(Difference global positioning system,差分全球定位系统)中的UHF(Ultra high frequency,甚高频)无线数据链。其支持多种传输协议,传输距离30 km以上,无线传输速率最高19 200 bit/s,频率范围达410~470 MHz。具有坚固、可靠性高、误码率低的特点[9]。
3 系统软件设计
3.1 机载软件和归航控制算法设计
机载软件包括安装在归航控制器上的落点预置软件和归航控制软件。归航控制软件主要完成以下功能:(1) 接收并下传翼伞运动状态数据;(2) 根据归航控制算法计算出翼伞的关键参数和操纵量;(3) 接收手动无线控制指令;(4) 输出操纵执行装置驱动信号。迄今为止,已经发展的可控翼伞归航控制算法主要有3类[10-12]:简单归航、最优控制归航和分段归航。早期的翼伞系统主要采用的是简单归航方法:包括有盲角的径向归航控制方法、有盲角的比例径向归航控制方法、改型锥形归航控制方法、带盲区的非比例控制归航方法等。简单归航方法的不足在于:着陆精度极大程度依赖于初始投放点的位置,而且无法保证逆风着陆。需要另外设置逆风着陆控制来保证着陆安全。最优控制归航方法以对目标的终点距离偏差最小、所需控制能量最少等为目标函数,以给定的初始状态和终端状态为条件,寻求满足一定约束条件的最优控制量。最优控制归航求解比较困难,而且偏重于理论研究,目前没有得到实际应用。分段归航通常将整个归航轨迹分为若干段:每段所要实现的飞行目标不同。翼伞系统的气动力特性不易精确计算,需要一个鲁棒性比较强的归航控制方式,分段归航简化了翼伞整个飞行过程的控制流程,且由于翼伞着陆点通常是固定点,其基本运动形式主要是滑翔与转弯,便于分段设计。因此,归航控制软件选用了分段归航的控制算法:主要分为定向归航、盘旋削高、逆风控制、强制最终着陆4个阶段,其控制流程如图4所示。落点预置软件主要功能为将落点地理位置坐标和风向值等数据预先置入归航控制器,其流程如图5所示。
3.2 地面软件设计
地面软件包括安装在地面控制计算机上的遥控通讯软件和GPS数据处理软件。遥控通讯软件主要功能为在手动操纵模式时,无线上传地面操作人员输入的手动归航指令并下载翼伞状态信息:包括经度、纬度、高度和航向角等,实现实时显示和存储。遥控通讯软件可以采用通用的RS232串口通讯软件。GPS数据处理软件的主要功能是将接收到的翼伞状态数据提取出来并转换为易于读写和处理的*.txt格式文件。其流程如图6所示。
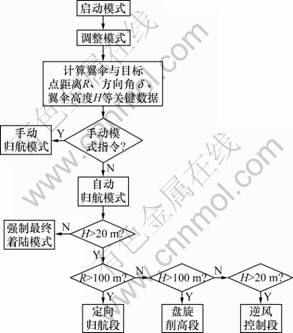
图4 归航控制软件分段归航控制流程图
Fig.4 Process paragraph of multi-segment control for homing control software
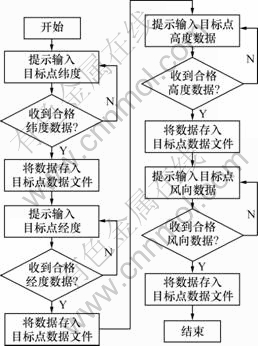
图5 落点预置软件流程图
Fig.5 Process paragraph of landing point pre-setting software
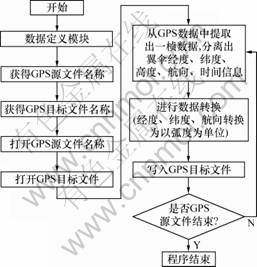
图6 GPS数据处理软件流程图
Fig.6 Process paragraph of GPS data converse software
4 结果与讨论
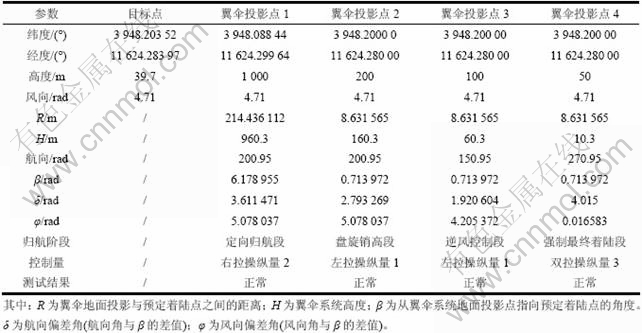
该精确定点归航翼伞控制系统研制完成后,对其进行软硬件桌面联合测试和带负载试验的验证。桌面联试分为自动归航和手动归航2种模式。自动归航模式测试选取了4个工作阶段16种工作模式的翼伞投影点作为输入。表1所示为在自动归航模式下的部分测试数据和结果。在手动归航模式测试中,地面控制计算机无线发送了7种手动归航控制指令:包括左拉操纵量1、右拉操纵量1、左拉操纵量2、右拉操纵量2、双拉操纵量3、无控(放松伞绳到初始状态)、退出手动模式。电机对7种手动遥控指令均响应迅速、到位精确。由此可见,控制系统对GPS数据的处理和运算、对电机操纵量的控制结果均非常理想,达到了设计预期的效果。
表1 系统软硬件桌面联合测试部分测试数据
Table 1 Part testing data of system software and hardware association test
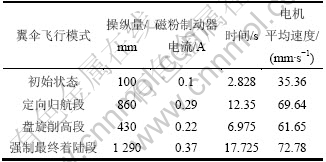
负载试验采用磁粉制动器作为操纵执行机构的负载。共完成了16个状态(包括4种操纵量、每种操纵量分别对应4种负载载荷)的操纵试验,其部分试验数据见表2。在负载试验中,最大载荷和低载荷情况下电机的运行时间均与设计值一致,电机到位和制动距离精确。试验还另外进行了电机自锁验证,即电机带载荷提升一段操纵量后静止约30 s后再提升另外一段操纵量,电机的自锁性能在试验中表现优异,与系统设计一致。因此,定点归航翼伞控制系统在上述2种地面大型试验中均工作正常、性能良好,达到了设计要求。
表2 系统负载试验部分测试数据
Table 2 Part testing data of system load test
5 结论
(1) 精确定点归航翼伞控制系统提高了控制精确度、可控的伞衣面积及翼伞的载荷能力。该定点归航翼伞控制系统通过了系统软硬件联试及负载试验。
(2) 下一步工作是进行空投试验验证。该系统研制成功后,可以应用于各种物资及人员的定点精确空投领域。
参考文献:
[1] Sim A G, Murray J E, Neufeld D C. Development and flight test of a deployable precision landing system[J]. Journal of Aircraft, 1994, 31(5): 1101-1108.
[2] Murray J E, Sim A G, Neufeld D C, et al. Further development and flight test of an autonomous precision landing system using a parafoil[R]. California: Dryden Flight Research Center, 1994: 2-10.
[3] Wright R, Benney R, McHugh J. Precision Airdrop System[C]//18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar. Munich: AIAA, 2005: 437-470.
[4] 李哲, 顾正铭. 可控翼伞导航控制系统的设计[J]. 航天返回与遥感, 2000, 21(2): 1-7.
LI Zhe, GU Zheng-ming. Design of navigation control system for parafoil[J]. Spacecraft Recovery & Remote Sensing, 2000, 21(2): 1-7.
[5] 陈瑞明. 翼伞精确定点着陆归航方法研究[J]. 航天返回与遥感, 2005, 26(1): 18-23.
CHEN Rui-ming. Homing method research of precision landing of parafoil system[J]. Spacecraft Recovery & Remote Sensing, 2005, 26(1): 18-23.
[6] 李锋, 齐晓慧, 李玉辉. 无人驾驶动力伞飞行控制系统的设计[J]. 兵工自动化, 2008, 27(2): 82-83.
LI Feng, QI Xiao-hui, LI Yu-hui. Design of unpiloted powered parafoil flight control system[J]. O.I.Automation, 2008, 27(2): 82-83.
[7] 张超, 许化龙. 导弹控制系统数据采集系统设计[J]. 计算机测量与控制, 2009, 17(10): 2015-2017.
ZHANG Chao, XU Hua-long. Design of data acquisition system based on PC/104 bus of missile control system[J]. Computer Measurement & Control, 2009, 17(10): 2015-2017.
[8] 高金生, 高宏洋, 喻寿益. 基于神经元的异步电机直接转矩控制系统速度辨识[J]. 中南大学学报: 自然科学版, 2009, 40(5): 1367-1373.
GAO Jin-sheng, GAO Hong-yang, YU Shou-yi. Speed identification in direct torque control system of induction motor base on neuron[J]. Journal of Central South University: Science and Technology, 2009, 40(5): 1367-1373.
[9] 陈峰, 桂卫华, 王随平, 等. 深海采矿机器人遥测遥控系统[J]. 中南工业大学学报: 自然科学版, 2003, 34(2): 320-322.
CHEN Feng, GUI Wei-hua, WANG Sui-ping, et al. Remote measure and control system of deep-sea mining robot[J]. Journal of Central South University: Science and Technology, 2003, 34(2): 320-322.
[10] 熊菁. 翼伞系统动力学与归航方案研究[D]. 长沙: 国防科技大学航天与材料工程学院, 2005: 17-22.
XIONG Qing. Research on the dynamics and homing project of parafoil system[D]. Changsha: National University of Defense Technology. School of Aerospace and Materials Engineering, 2005: 17-22.
[11] 蒲志刚, 李良春, 唐波, 等.翼伞系统分段归航方向控制方法[J]. 四川兵工学报, 2009, 30(10): 117-119.
PU Zhi-gang, LI Liang-chun, TANG Bo, et al. Control method for multiphase homing orientation of parafoil system[J]. Journal of Sichuan Ordnance, 2009, 30(10): 117-119.
[12] 史献林, 余莉. 翼伞空中回收系统的研究及其进展[J]. 航天返回与遥感, 2008, 29(1): 1-10.
SHI Xian-lin, YU Li. The study and development of the parafoil mid-air retrieval system[J]. Space craft Recovery & Remote Sensing, 2008, 29(1): 1-10.
(编辑 赵俊)
收稿日期:2012-01-10;修回日期:2012-03-08
基金项目:国家“十二五”民用航天技术预先研究项目(D010101)
通信作者:李春(1982-),女,山西太原人,工程师,从事航天器回收着陆测控技术研究;E-mail:bettynuaa@hotmail.com

