
DOI: 10.11817/j.issn.1672-7207.2020.03.016
基于图像三维重建的隧道超欠挖检测方法研究
阳军生1,张宇1, 2,祝志恒1,傅金阳1,谢壮1,王立川1, 3
(1. 中南大学 土木工程学院,湖南 长沙,410075;
2. 广州地铁设计研究院股份有限公司,广东 广州,510010;
3. 中国铁路成都局集团公司有限公司,四川 成都,610082)
摘要:提出一种基于图像三维重建的隧道超欠挖检测方法。该方法基于计算机视觉运动恢复结构算法(SFM)和半全局匹配算法(SGM)实现隧道实际开挖轮廓图像三维点云重建,再利用Delaunay三角剖分算法实现隧道实际开挖轮廓三维曲面模型重建,并基于设计开挖轮廓线和中心轴线建立隧道设计开挖轮廓三维曲面模型;以蒙华铁路大围山隧道DK1665+454―DK1665+484作为工程试验段进行现场试验分析,对所提方法有效性进行验证。研究结果表明:通过隧道实际开挖轮廓三维曲面模型与设计的开挖轮廓三维曲面模型比较分析,可实现对不同类型隧道整体超欠挖状况、超欠挖值、超欠挖面积以及超欠挖体积进行检测与评价;隧道设计开挖轮廓三维曲面模型具有数据采集设备简单、不干扰施工、检测范围全面、检测结果准确的特点;图像三维重建检测方法可实现隧道超欠挖准确检测,检测精度与三维激光扫描检测方法的相近,且比传统检测方法的精度高。
关键词:隧道工程;超欠挖;运动恢复结构;半全局匹配;三维图像点云;图像三维重建
中图分类号:U45 文献标志码:A 开放科学(资源服务)标识码(OSID)
文章编号:1672-7207(2020)03-0714-10
Study on tunnel under-over break detection method based on three-dimensional image reconstruction technology
YANG Junsheng1, ZHANG Yu1, 2, ZHU Zhiheng1, FU Jinyang1, XIE Zhuang1, WANG Lichuan1, 3
(1. School of Civil Engineering, Central South University, Changsha 410075, China;
2. Guangzhou Metro Design & Research Institute Co. Ltd., Guangzhou 510010, China;
3. China Railway Chengdu Group Co. Ltd., Chengdu 610082, China)
Abstract: A method of tunnel under-over break detection based on image three-dimensional(3D) reconstruction was proposed.This method was based on computer vision structure from motion algorithm(SFM) and semi-global matching algorithm(SGM) to realize 3D point cloud reconstruction of the actual tunnel excavation contour image,and then the Delaunay triangulation algorithm was used to reconstruct the 3D surface model of the actual excavation contour of the tunnel, and the design excavation contour 3D surface model was built based on the tunnel design excavation contour line and central axis. The DK1665+454―DK1665+484 of the Dawei Mountain Tunnel of Inner Mong―Hua Railway was selected as the engineering test section, field test analysis was carried out,and the validity of the proposed method was verified. The results show that through the comparison and analysis of the actual excavation profile three-dimensional surface model and the design excavation contour 3D surface model, it can realize the detection and evaluation from the aspect of overall under-over break, under-over break value, under-over break area and under-over break volume of different types of tunnel. It has the characteristics that the data acquisition equipment is simple, the construction has no interference, the detection range is comprehensive and the test results are accurate. The image 3D reconstruction detection method can accurately detect the tunnel under-over break, and the detection accuracy is similar to that of the 3D laser scanning detection method, and is higher than that of the traditional detection method.
Key words: tunnel engineering; under-over break; structure from motion; semi-global matching; three-dimensional image point cloud; image three-dimensional reconstruction
隧道超挖和欠挖分别是指实际开挖断面大于和小于设计开挖断面的部分,隧道开挖不得超过允许超挖值,同时要严格控制欠挖值。超欠挖不仅影响隧道施工的安全性和围岩的稳定性,而且直接影响工程建设质量和成本。超欠挖的准确检测可反映隧道开挖爆破控制的质量,也可为增加开挖及支护等成本测算提供依据。文献[1]规定隧道超欠挖检测方法主要有激光束测定、全站仪测定以及激光隧道限界测量仪测定等。目前,工程上普遍采用全站仪、断面仪等传统方法对隧道超欠挖进行检测。实践表明,传统方法虽然可满足超欠挖检测的要求,但其采用“逐点式”测量方式,测点有限,导致数据获取效率低,影响施工进度。研究者主要从数学计算、二维图像处理以及三维激光扫描技术等方面进行了研究。王明年等[2-3]从数理统计角度定性分析了不同围岩级别断面的超欠挖值,得到了各类围岩的超欠挖值在隧道断面不同部位的分布规律。魏继红等[4]采用图像处理技术对隧道超欠挖进行了定量分析和评价,可为工程超欠挖的判断与决策提供一定依据,但其仅局限于二维图像的处理,未能实现隧道超欠挖在三维空间上的分析和评价。李海波等[5-6]将三维扫描技术应用于隧洞的超欠挖检测,可实现高效、精确的隧道超欠挖检测,但激光扫描仪造价高、操作复杂且对环境质量要求高等,限制了三维激光扫描检测技术在超欠挖检测中的广泛应用和推广。因此,亟待研究一种检测设备经济、检测方式灵活、检测结果准确全面的超欠挖检测方法。近年来,随着数码相机性价比、成像质量和分辨率的大幅度提高以及计算机性能的快速提升,数字摄影测量和计算机视觉在土木工程中的应用备受青睐,一些研究者将其应用于裂缝检测、损伤评估、变形监测等,如TOROK等[7]对裂缝图像进行三维重建,获取深度等信息,发现该方法能够高效地实现结构裂缝检测和评估;KWAK等[8]利用相机的经济性和可用性,将摄影测量系统应用于混凝土梁的变形监测中,实现了静态和动态变形监测,变形均方根误差为亚毫米级。可见,图像三维重建技术可满足隧道超欠挖检测精度要求,若加以借鉴并充分发挥其技术特点,则能够有效克服现有超欠挖检测方法的不足。本文作者提出一种基于图像三维重建的隧道超欠挖检测方法,分析和研究图像三维重建理论以及隧道超欠挖检测。在此基础上,以蒙华铁路大围山隧道为试验对象,选取工程试验段,采用所提方法与传统方法及三维激光点云检测方法进行超挖检测并对检测结果进行对比分析,以验证所提方法的适用性与可靠性。
1 隧道开挖轮廓三维重建理论方法
三维模型承载的信息量远比二维图像信息量大,且可视化表达符合思维习惯,而采用计算机视觉多视几何三维重建技术中主要理论和算法可实现对二维图像的三维重建。为此,本文提出基于图像三维重建的隧道超欠挖检测方法,该检测方法主要由图像采集、三维点云重建、点云数据预处理、三维曲面重建以及隧道超欠挖检测应用5部分组成,见图1。
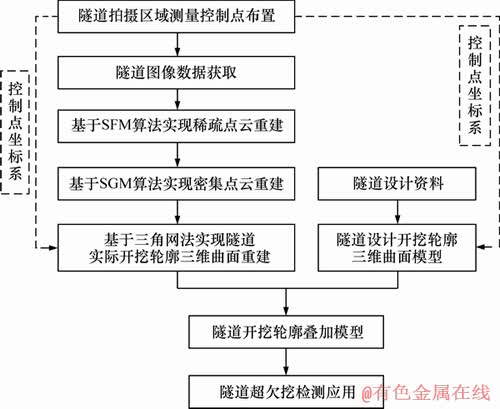
图1 基于图像三维重建的隧道超欠挖检测理论方法
Fig. 1 Flow chart of tunnel under-over break detection method based on 3D image reconstruction technology
1.1 隧道开挖轮廓图像采集
隧道开挖轮廓图像采集质量是后期数据处理的关键,也是获得良好三维图像点云效果的基础。图像采集设备主要有普通单反相机、外置闪光灯、控制点标定板。具体步骤如下。
1) 拍摄区域标定板布置。标定板应具有高对比度、可清楚识别中心位置特点,数量不少于3个。采用全站仪辅助获取标定板中心三维空间坐标,用于坐标系转换。
2) 相机参数调节。受隧道内光线暗、灰尘大、施工作业等影响,图像采集有别于室外拍摄,因此,需要对相机参数进行调节和测试以适应隧道环境。
3) 图像拍摄原则。图像应完全覆盖拍摄物体表面;相邻图像具有足够的重叠度(见图2),建议重叠度大于50%;相机镜头与隧道表面垂直拍摄。
4) 图像拍摄方法。以隧道中心轴线作为拍摄基线,按照先环向后纵向进行拍摄。在拍摄过程中,纵向移动间距为1.5~2.0 m,环向在180°之内建议拍摄18张图像,每10°拍摄1张,可适当加密。
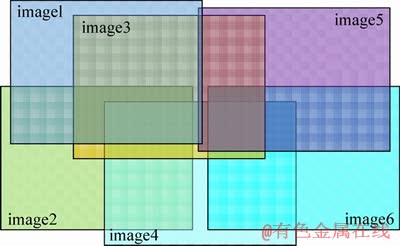
图2 图像重叠要求示意图
Fig. 2 Schematic diagram of image overlapping requirements
1.2 图像点云三维重建
获取隧道开挖轮廓图像数据后,采用运动恢复结构(SFM)算法[8-12]实现隧道实际开挖轮廓图像三维点云稀疏重建,进而采用半全局匹配(SGM)[13]算法对有重叠的影像进行密集匹配,对实际开挖轮廓图像密集点云进行重建。
SFM算法是一种单目视觉三维重建方法。在相机成像基本原理、多视几何及相机标定的基础上,从运动相机拍摄的多幅具有一定重叠度的隧道二维照片中估计相机的运动情况并重建出场景的三维空间信息(图3)。首先由尺度不变特征变换SIFT算法[14]提取匹配图像上的特征点,再通过透视投影矩阵估计与场景结构恢复以及迭代光束平差过程(iterative bundle adjustment procedure)自动求解相机方位和场景几何形态等信息[15],完成隧道开挖轮廓稀疏点云重建。
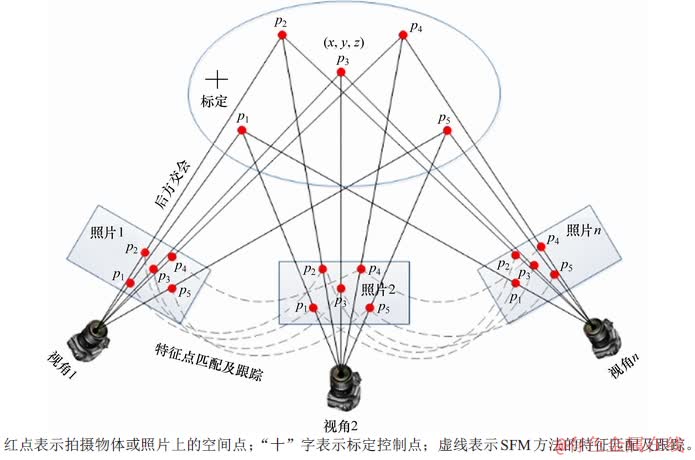
图3 基于SFM算法三维空间信息重建示意图
Fig. 3 Schematic diagram of reconstruction of 3D spatial information based on SFM algorithm
与传统测量方法不同,采用SFM算法仅能恢复场景与拍摄像机相对位置,缺乏尺度和方位信息,生成的三维点云数据只具有图像空间坐标系,因此,必须将其转变到现实的空间坐标系中。对于既有平移、旋转又有平移的2个空间直角坐标系转换,存在着3个旋转参数、3个平移参数以及1个尺度缩放参数共7个参数[16],对应的坐标变换公式为
 (1)
(1)
式中: 为2个空间直角坐标系坐标;
为2个空间直角坐标系坐标; ,
, 为3个平移参数;
为3个平移参数; ,
, 为3个旋转参数;m为尺度变化参数。
为3个旋转参数;m为尺度变化参数。
式(1)为2个不同空间直角坐标系的转换模型,具有7个参数,求解这7个参数需要3个以上已知公共点,当已知公共点超过3个时,可根据最小二乘法,通过迭代求解7个参数的最或然值。因此,基于3个以上标定板坐标以及对应点云坐标,可将稀疏点云纳入现实世界空间坐标系,得到具有绝对坐标系和尺寸的隧道实际开挖轮廓点云模型,见图4(a)。
在得到稀疏点云坐标系后,采用SGM算法对重叠影像进行密集匹配。SGM是一种计算机视觉领域的影像匹配算法,主要包括匹配代价计算、匹配代价聚合、视差计算、一致性检查共4个环节。其秉承全局匹配算法的优点,基于互信息执行逐像素代价计算,通过多个方向的一维DP近似二维的全局能量函数,可简化计算的复杂程度,有效避免纹理重复区域的错误匹配,对噪声不敏感,在不连续处也要进行稳定处理,能够有效提高计算效率。这正克服了隧道开挖轮廓图像纹理复杂、噪声干扰大的不足,能够有效地逐个对像素进行密集匹配,可得到十分密集的点云,点云精度高。基于此,可实现隧道开挖轮廓图像密集点云重建(见图4(b))。
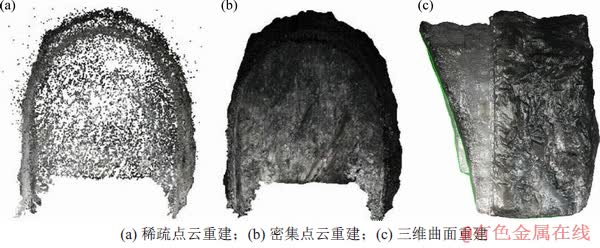
图4 隧道开挖轮廓图像三维重建
Fig. 4 3D reconstruction of tunnel excavation images
1.3 点云数据预处理
通过三维重建,获取的隧道开挖轮廓三维图像点云数据量庞大。而点云中不可避免地存在灰尘、施工机械、堆积物、电线及超前支护等大量冗余数据,这些不必要的信息会影响分析精度和效率。因此,在数据分析前,需要剔除这些冗余信息,对点云数据进行预处理。
灰尘及机器震颤产生的噪声称为孤点,指以该点为球心在一定范围内没有或者很少有其他信息的点。可采用statistical outlier removal滤波器[17]删除孤点,即通过对查询点与邻近点集之间的距离统计来判断并过滤掉离群点。施工机械、堆积物等一般在地面,可采用地形过滤的方法保留最低点,将其剔除;电线、超前支护一般离洞壁一定距离,可通过筛选洞壁轮廓点云,删除距离轮廓点云一定阀值的点云算法,将电线、超前支护等剔除。
1.4 基于图像点云数据三维曲面的重建
1.4.1 隧道实际开挖轮廓曲面三维重建
对三维图像点云进行曲面重构(曲面建模)是隧道超欠挖检测及整体超欠挖评价的基础,也是逆向工程的重要环节,通过建模可将离散的点云数据构建连续三维曲面。目前,常用的曲面模型构建方法主要分为三角域网格曲面重建和四边域网格曲面重建。三角域网格曲面重建通过构建大量三角面片对待建曲面进行线性逼近,该方法具有曲面构建灵活性和适应性强的特点,可面向散乱不规则数据点的曲面重建,适合工程分析中不规则点云数据的三维重建。而四边域网格曲面重建适合于分布规则有序的点云曲面建模,尤其是较光滑物体表面点云数据的三维重建。
采用传统矿山法施工工艺开挖的隧道,开挖轮廓凹凸不平,获取的三维图像点云杂乱无章,因而,这里采用Delaunay三角剖分算法[18](图5)对隧道开挖轮廓三维曲面进行重建(见图4(c))。
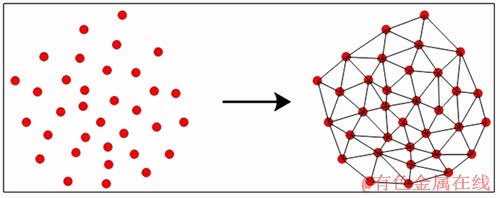
图5 点云的Delaunay三角剖分示意图
Fig. 5 Diagram of Delaunay triangulation of point cloud
具体步骤为:采用Delaunay三角剖分算法完成曲面数据的三角化,用平面域内的Delaunay三角剖分初步获取散乱数据的拓扑关系。先对每个采样点搜索临近点,基于最大化最小角原则连接临近点成三角面片,形成初始三角网,在此基础上加入其他离散点生成三角网格,实现对点云的三角化模型重建。
1.4.2 隧道设计轮廓三维曲面重建
为完成隧道超欠挖评价,需要将隧道实际开挖轮廓模型与设计开挖轮廓模型进行比较分析。因此,建立现实世界空间坐标系下隧道设计开挖轮廓三维曲面模型,见图6。具体步骤如下。
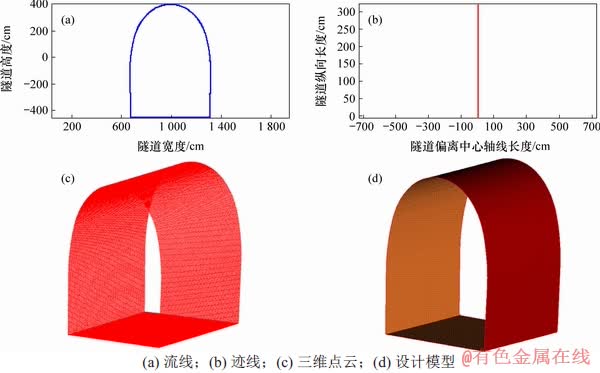
图6 隧道设计轮廓曲面三维重建
Fig. 6 3D surface reconstruction of tunnel design excavation
1) 结合设计图纸,将隧道开挖位置设计开挖轮廓线作为流线,采用AutoCAD软件将设计开挖轮廓线进行等分,并提取开挖轮廓线上点坐标,作为流点。
2) 将隧道设计中心轴线作为迹线,采用AutoCAD软件将迹线打成等分点,并提取等分点坐标,作为迹点。
3) 将流线(点)沿迹线(点)方向拉伸形成真实坐标系下隧道设计开挖轮廓三维点云。
4) 对隧道设计开挖轮廓三维点云进行曲面重建,可获得现实世界空间坐标系下隧道设计开挖轮廓三维曲面模型。
也可采用3D Max和Civil 3D等软件通过正向制作方法建立隧道设计开挖轮廓三维曲面模型。
2 隧道超欠挖检测与评价方法
建立隧道实际开挖轮廓图像三维模型与设计开挖轮廓三维模型后,可从整体超欠挖、超欠挖值、超欠挖面积及超欠挖体积这4个方面进行检测和评价。
2.1 整体超欠挖评价
为可视化隧道爆破质量,对隧道整体超欠挖进行评价。以设计开挖轮廓为参考模型,实际开挖轮廓模型为比较模型,计算隧道整体超欠挖量,可归结为计算三维网格实体模型的距离。在计算时,通过计算比较网格实体模型的顶点到参考网格实体模型的距离来实现两模型的比较分析。具体方法如下。
1) 对于比较网格实体模型的顶点,需要在参考网格中搜索最近的三角形。
2) 获得最近三角形后,利用点到平面距离公式计算比较模型到参考模型的距离。设平面方程为p(x, y, z)=ax+by+cz+d=0,计算比较网格实体模型上每个顶点(xi, yi, zi)=(i=0,1,…,n)到参考平面的距离D:
 (2)
(2)
3) 计算的距离有正负之分(正值为超挖、负值为欠挖),可通过三角形的法线来确定网格的内部和外部,进而根据三角形的法向确定距离的符号。
4) 对距离进行统计分析,可得到超欠挖平均值、标准差及均方根估计。
5) 将计算的距离分量字段转换成颜色梯度,获得比较模型和参考模型比较分析结果,见图7。从图7可直观地获取隧道不同位置的超欠挖情况(正值表示超挖值,负值表示欠挖值,模型底部出现的负值表示两模型高程的差别,不代表欠挖,下同),从而实现对隧道整体超欠挖分析与评价。
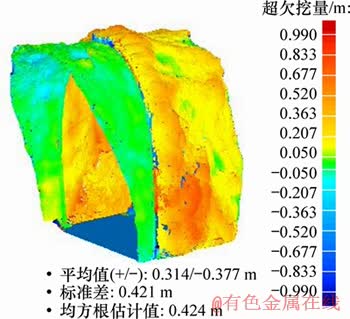
图7 隧道开挖轮廓超欠挖整体评价
Fig. 7 Overall Evaluation of tunnel excavation over-under break
2.2 超欠挖值
隧道超(欠)挖值是超(欠)挖位置至设计开挖轮廓切线的垂直距离。采用系统平面法获取超欠挖值计算截面(系统平面有XY平面、XZ平面和YZ平面)。若选取XY系统平面,则对X方向旋转指定角度 和Y方向旋转指定角度
和Y方向旋转指定角度
 实现截面定向,并指定位置度N实现截面定位,通过以上3个变量可精确获取指定里程的截面方位,见图8(a)。截取指定位置整体超欠挖云图,得到该截面上比较模型轮廓线和参考模型轮廓线,通过计算比较模型轮廓线上每个顶点到参考模型轮廓线的距离,可获取该截面超欠挖值,并可对欠挖值进行统计分析,包括最大值、平均值、偏差及均方根估计值,见图8(b)。
实现截面定向,并指定位置度N实现截面定位,通过以上3个变量可精确获取指定里程的截面方位,见图8(a)。截取指定位置整体超欠挖云图,得到该截面上比较模型轮廓线和参考模型轮廓线,通过计算比较模型轮廓线上每个顶点到参考模型轮廓线的距离,可获取该截面超欠挖值,并可对欠挖值进行统计分析,包括最大值、平均值、偏差及均方根估计值,见图8(b)。
2.3 超欠挖面积
隧道超(欠)挖横断面积(简称超(欠)挖面积)是实际开挖断面在设计轮廓线以外(内)部分的面积。对比较模型与参考模型进行布尔减法运算,从比较模型中减去参考模型,并进行一定的修剪处理,可获得超欠挖模型,见图9(a)。采用全局坐标系下系统平面切割模型获得投影截面(见图9(b)),可计算隧道超欠挖面积S1(见图9(c))。
2.4 超欠挖体积量
隧道超(欠)挖量是开挖进尺内超(欠)挖的体积。截取指定进尺超欠挖模型,通过求解模型体积到参考平面,可计算隧道超欠挖体积量V(图9(d))。
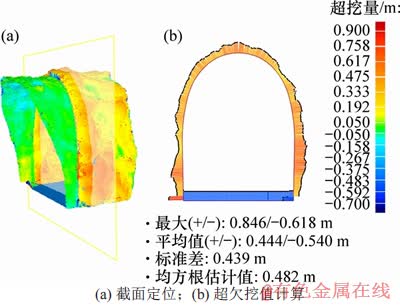
图8 隧道超挖量测量
Fig. 8 Measurement of tunnel over break value.
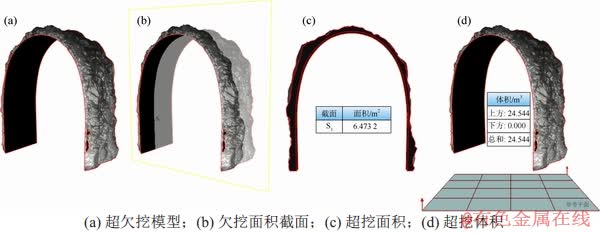
图9 隧道超挖面积和体积测量
Fig. 9 Measurement of tunnel over break area and volume
3 现场试验验证
为验证基于图像三维重建的隧道超欠挖检测方法的适用性及检测结果的准确性,选取蒙华铁路大围山隧道作为试验对象(见图10),采用图像三维重建检测、全站仪检测、三维激光检测这3种方法进行现场对比试验。
3.1 试验设备
全站仪:采用GeMax ZT20R Pro型号全站仪,其标准测角精度为2'',测距精度为(2+2×10-6) mm。
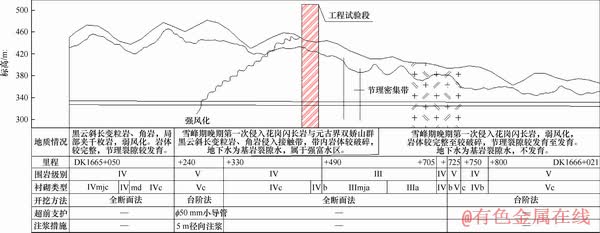
图10 DK1665+050―DK1666+021段纵断面及施工措施图
Fig. 10 Longitudinal section and construction measures of DK1665+050―DK1666+021 section
数码相机:采用佳能70D型号单反相机,其有效像素约2 020万。采用表1中相机参数采集隧道图像。
表1 隧道图像采集相机参数
Table 1 Camera parameters of tunnel image acquisition

激光扫描仪:采用RIEGL VZ-1000型号地面激光扫描仪,其100 m处绝对精度为8 mm,相对精度为5 mm,激光发射频率为300 000点/s。
3.2 试验概况
3.2.1 试验方案
考虑到隧道超挖部分要用喷射混凝土来回填,喷射混凝土数量在一定程度上反映了隧道超挖情况,因此,可以喷射混凝土数量(扣除回弹量)作为参考指标,分别采用不同检测方法对隧道喷射混凝土数量进行检测,并对检测结果进行分析。具体方案如下。
1) 选取大围山隧道DK1665+454―DK1665+484段作为工程试验段,隧道每开挖1个循环,现场写实记录喷射混凝土总量和喷射混凝土回弹量,计算每延米喷射混凝土数量,将其作为参考值。
2) 分别采用以上3种设备对隧道开挖轮廓进行数据采集。初支施做后,再次对同一位置采集初期支护喷混凝土数据,根据2期数据计算隧道喷射混凝土数量。
3) 对比分析不同检测方法检测结果。
3.2.2 方案实施
隧道工程试验段为Ⅳ级围岩[20],设计每循环开挖进尺为2.4 m。根据现场施工,在试验段30 m之内,实际开挖12个循环。隧道每开挖1个循环,采用写实记录并采用上述3种设备对数据采集并处理,见表2。
表2 数据采集与处理
Table 2 Date acquisition and process

3.3 结果分析
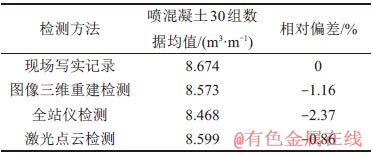
在30 m试验范围内,共得到30组喷射混凝土现场记录与检测数据。对于现场单位长度隧道,人工写实采集数据效率较低,全站仪采集数据速率较快,数码相机采集数据速率次之,激光扫描仪采集数据速率最快。图11所示为试验段喷混凝土参考值以及3种检测方法检测结果。为反映不同检测方法检测结果的差异性,分别计算3种检测方法所得值与参考标准值的偏差(见图12)、相对偏差以及检测结果均值,见表3。
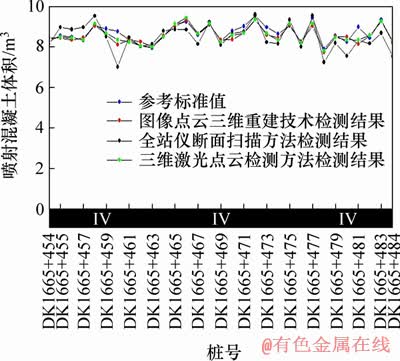
图11 喷射混凝土数量检测结果
Fig. 11 Test results of shotcrete quantity
从图11可知这3种方法均满足施工检测要求。根据图12和表3所示结果,图像三维重建检测方法与三维激光点云检测方法所得检测喷混凝土结果偏差变化趋势一致,且明显小于全站仪断面扫描方法检测结果偏差,这说明基于图像三维重建检测方法与三维激光点云检测方法有相近的检测精度,且检测精度更高。
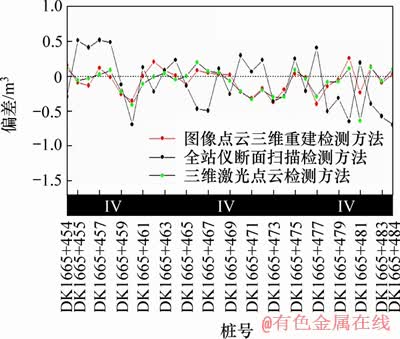
图12 喷射混凝土数量检测结果偏差
Fig. 12 Deviation of test results of shotcrete quantity
表3 喷射混凝土数量检测结果均值及相对偏差
Table 3 Mean value and relative deviation of test results of shotcrete quantity
4 结论
1) 采用计算机视觉三维重建技术中主要理论和算法,提出了一种基于图像三维重建的隧道超欠挖检测方法,其具有检测设备成本低、检测范围全面、检测结果准确的特点。
2) 隧道超欠挖检测方法可从整体超欠挖、超欠挖值、超欠挖面积以及超欠挖体积多个角度对隧道超欠挖进行检测与评价。与传统逐点测量检测方法相比,该方法显著提高了检测的效率和检测结果的全面性。
3) 以蒙华铁路大围山隧道DK1665+454―DK1665+484为工程试验段,以喷混凝土数量实测结果为参考指标,对所提方法进行现场试验验证。图像三维重建、全站仪检测、激光扫描这3种检测方法的喷混凝土检测值与参考值相对偏差分别为 -1.16%,-2.37%和-0.86%,表明所提方法在检测精度上与激光扫描方法相近,检测结果偏差、变化趋势一致,且明显比全站仪检测方法的检测精度高。
4) 基于图像三维重建的超欠挖检测方法并结合现场施工测量,可在不干扰施工的情况下实现隧道超欠挖精准检测,具有广阔的应用前景。
参考文献:
[1] Q/CR 9604―2015. 高速铁路隧道工程施工技术规程[S].
Q/CR 9604―2015. Technical specification for construction of high speed railway tunnel engineering[S].
[2] 王明年, 关宝树. 隧道超欠挖的统计规律及其对隧道可靠度的影响[J]. 岩土工程学报, 1997, 19(1): 83-88.
WANG Mingnian, GUAN Baoshu. The statistical rule of over-under break of tunnel and its influence on tunnel reliability[J]. Chinese Journal of Geotechnical Engineering, 1997, 19(1): 83-88.
[3] 赵会兵. 钻爆法施工隧道的超欠挖概率统计规律研究[J]. 铁道工程学报, 1999, 16(3): 106-110, 105.
ZHAO Huibing. Study on the law of probability statistics for over excavating and under excavating during construction of tunnel by drilling and blasting method[J]. Journal of Railway Engineering Society, 1999, 16(3): 106-110, 105.
[4] 魏继红, 吴继敏, 孙少锐. 图像处理技术在隧洞超欠挖评价中的应用[J]. 水文地质工程地质, 2005, 32(1): 105-108.
WEI Jihong, WU Jimin, SUN Shaorui. Image processing on the evaluation of overbreak and underbreak in the tunnels[J]. Hydrogeology and Engineering Geology, 2005, 32(1): 105-108.
[5] 李海波, 杨兴国, 赵伟, 等. 基于三维激光扫描的隧洞开挖衬砌质量检测技术及其工程应用[J]. 岩石力学与工程学报, 2017, 36(S1): 3456-3463.
LI Haibo, YANG Xingguo, ZHAO Wei, et al. Measurement technology and its application for tunnel excavation and lining quality based on 3D laser scanning[J]. Chinese Journal of Rock Mechanics and Engineering, 2017, 36(S1): 3456-3463.
[6] 许磊, 王长进. 基于激光点云的隧道超欠挖检测方法研究[J]. 铁道工程学报, 2016, 33(12): 77-81.
XU Lei, WANG Changjin. Research on the detection method of tunnel under-over break using point cloud[J]. Journal of Railway Engineering Society, 2016, 33(12): 77-81.
[7] TOROK M M, FARD M G, KOCHERSBERGER K B. image-based automated 3D crack detection for post-disaster building assessment[J]. Journal of Computing in Civil Engineering, 2015, 28(5): 1-13.
[8] KWAK E, DETCHEV I, HABIB A, et al. Precise photogrammetric reconstruction using model-based image fitting for 3D beam deformation monitoring[J]. Journal of Surveying Engineering, 2013, 139(3): 143-155.
[9] HARTLEY R, ZISSERMAN A. Multiple view geometry in computer vision[M]. Cambridge, UK: Cambridge University Press, 2004: 78-80.
[10] SZELISKI R. Computer vision: algorithms and applications[M]. Berlin,Germany: Springer Science & Business Media, 2010: 45-46..
[11] HIRSCHMULLER H. Stereo processing by semiglobal matching and mutual information[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(2): 328-341.
[12] 魏占玉, RAMON A, 何宏林, 等. 基于SfM方法的高密度点云数据生成及精度分析[J]. 地震地质, 2015, 37(2): 636-648.
WEI Zhanyu, RAMON A, HE Honglin, et al. Accuracy analysis of terrain point cloud acquired by “structure from motion” using aerial photos[J]. Seismology and Geology,2015, 37(2): 636-648.
[13] LOWE D G. Distinctive image features from scale-invariant key points[J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[14] TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al. Bundle adjustment: a modern synthesis[J]. Vision Algorithms Theory & Practice, 2000, 14(7): 153-177.
[15] 曾文宪, 陶本藻. 三维坐标转换的非线性模型[J]. 武汉大学学报(信息科学版), 2003, 28(5): 566-568.
ZENG Wenxian, TAO Benzao. Non-linear adjustment model of three-dimensional coordinate transformation[J]. Journal of Geomatics and Information Science of Wuhan University, 2003, 28(5): 566-568.
[16] SULTANI Z N, GHANI R F. Kinect 3D point cloud live video streaming[J]. Procedia Computer Science, 2015, 65: 125-132.
[17] 李凤霞, 刘咏梅, 王晓哲, 等. 一种基于映射法的散乱点云Delaunay三角剖分算法[J]. 计算机应用研究, 2015, 32(3): 950-953.
LI Fengxia, LIU Yongmei, WANG Xiaozhe, et al. New Delaunay triangulation algorithm of point cloud based on parametric method[J]. Application Research of Computers, 2015, 32(3): 950-953.
[18] 陈伟, 刘肖琳. 一种快速三维散乱点云的三角剖分算法[J]. 计算机仿真, 2009, 26(9): 338-341.
CHEN Wei, LIU Xiaolin. A fast triangulation algorithm for unorganized 3-D points[J]. Computer Simulation, 2009, 26(9): 338-341.
(编辑 陈灿华)
收稿日期: 2019 -05 -10; 修回日期: 2019 -07 -12
基金项目(Foundation item):国家自然科学基金资助项目(51608539,51878669);中国博士后科学基金资助项目(2016M592451,2017T100610) (Projects(51608539, 51878669) supported by the National Natural Science Foundation of China; Projects(2016M592451, 2017T100610) supported by the China Postdoctoral Science Foundation)
通信作者:祝志恒,博士,高级工程师,从事土木工程监测、检测及其信息化技术等研究;E-mail: zzh8207@163.com

