J. Cent. South Univ. Technol. (2011) 18: 451-457
DOI: 10.1007/s11771-011-0717-3
Kinematical system of breadth cam profile design
SHIN Joong-ho, LI Lin(李琳), YANG Hyun-dai, KWON Soon-man
Department of Mechanical Design & Manufacturing, Changwon National University, Changwon 641-773, Korea
? Central South University Press and Springer-Verlag Berlin Heidelberg 2011
Abstract: The design solutions for breadth cam mechanism were presented. The main topics of the shape design for breadth cam was to calculate the coordinate at each contact point to determine the cam profile. The proposed method according to velocity and geometric relationships of instant velocity centers can easily determine each contact point at any instant moment. The cam profile was defined by contouring of the contact points. And also a program was developed by using Microsoft Visual C++ program, which can quickly and easily draw a 2D cam profile through the displacement diagram. Finally, the program was used to confirm the accuracy on the breadth cam profile design by computer animation graphically.
Key words: cam profile; breadth cam; reciprocating follower; oscillating follower; instant velocity center
1 Introduction
With the rapidly development and popularization of mechanical products in modern society, it has been such an important question on designing and producing mechanisms precisely. Cam mechanisms can transfer the evolvement of cam to the motion of follower, so it was widely applied to various machineries. With numerical controlled manufacture systems being widely applied in this time, it is necessary for the designers to design a new type of cam profile. But, the conventional type of cam profile is usually defined in approximation by lines or curves which have bigger error and require more nodal points, resulting in chattering of principle axis. In fact, the design process of cam must make the accurate solutions for precise cam profile.
The common cam mechanisms have only one follower contacted with one cam. If the designers want to use two followers, the only way is to design a conjugate cam system, which means two-cams mechanism. So, it not only occupies larger space, but also has higher cost. Breadth cam system can be subjected as a new type of cam system with a pair of followers for one cam.
A breadth cam gets its name because the centers of the rollers are a constant distance apart. By the motion of follower, a breadth cam mechanism can be classified as two types: one with a pair of reciprocating motion followers in Fig.1, and the other with a pair of oscillating motion followers in Fig.2.
The advantage of the breadth cam is elimination of the redundant preloading constraints to avoid jumping velocity between cam and followers. Thus, it can be used widely for the film projector, the gear grinding machine, the piston pump and other types of machines.

Fig.1 Breadth cam mechanism with reciprocating motion

Fig.2 Breadth cam mechanism with oscillating motion
QIAN [1] presented a constant-diameter cam mechanism with a planar motion follower. The cam had two followers on the coupler link of the slider mechanism. By the motion of followers, the relations between the geometric parameters and the cam rotational angles were established. YE and MICHAEL [2] gave the synthesis and analysis of constant-breadth cam mechanisms with oscillating or translating flat-faced followers. They defined the cam profile design of cam with different lengths of flat-faced followers. And ZAYAS et al [3] gave the displacement function of follower generated by constant breadth cam mechanisms. They built the displacement by combining segments for the complete cycle of displacement functions. QIU et al [4] proposed a universal optional method to cam curve design using uniform B-splines. ZHOU and QIAN [5] presented the analysis and design method for yoke typed cam mechanism activated in dobby shedding machines.
The main topic of the shape design for breadth cam is to calculate the coordinates to determine the profile through each contact point. The design solutions for breadth cam profiles were presented. The proposed method according to velocity and geometric relationships at instant velocity centers can determine the coordinates at contact points easily and correctly. And an automatic program using Microsoft Visual C++ program, which can quickly and easily confirm a 2-dimensional cam profile through a displacement diagram, was developed.
2 Kinematic relationships of general cam mechanism
Fig.3 shows two types of the conventional cam mechanisms, which consist of frame (link 1), cam (link 2), and follower (link 3). According to Kennedy’s theorem, 3-bar linkage has three instant velocity centers, and they lie on the same straight line [6]. Fig.3(a) shows three instant velocity centers for a cam mechanism in reciprocating motion and Fig.3(b) shows three instant velocity centers for a mechanism in oscillating motion, where Rr, R and C represent the roller follower radius, the center of the roller follower and the contact point, respectively.
The velocity at I23 by cam rotation can be presented as
 (1)
(1)
where vC represents the velocity of cam; l represents the distance from cam center to I23 and θC represents the cam rotating angle.
As shown in Fig.3(a), reciprocating follower has linear displacement (y) and velocity, which is defined as
 (2)
(2)
Here, two velocities in Eqs.(1)-(2) for the cam and the follower must be equal based on kinematic constraints. Thus, l is given by
 (3)
(3)
 (4)
(4)

Fig.3 Instant velocity centers of cam mechanisms: (a) For reciprocating motion; (b) For oscillating motion
In Fig.3(b), oscillating follower cam rotate around a pivot, and it has angular displacement and velocity as
 (5)
(5)
Also, two velocities in Eq.(1) and Eq.(5) for the cam and the follower have the following relationship:
 (6)
(6)
where Zxy is the distance to I13 from cam center I12 [7].
 (7)
(7)
After determining the location of I23 in Fig.3, it is a keypoint that the contact point between the cam and roller follower is positioned on the radial line from follower center to I23.
3 Shape design for breadth cam with reciprocating followers
3.1 Design solution for contact points
As shown in Fig.4, a breadth cam mechanism has a pair of rollers as followers. The cam rotates in counter clockwise (CCW) with a constant angular velocity and drives the pair of the followers to translate up and down in reciprocating motion.
Thus, breadth cam mechanism must satisfy the kinematic conditions: roller followers on upper and lower sides have the same displacement, velocity and acceleration. In order to design the breadth cam profile to satisfy the kinematic conditions, instant velocity centers for I23 by two followers must be the same point. This means that the normal lines at the contact points by the upper roller and the lower roller must pass through the same point (i.e. instant velocity center I23).
For deriving the profile equation of the breadth cam, two coordinate systems are defined, as shown in Fig.4, where ψ1 and ψ2 represent contact angle, E represents the eccentricity, Q represents the pitch distance l. Sf(Xf, Yf) represents a stationary reference system and Sm(Xm, Ym) represents a mobile reference system. The reference system Sm is defined by the input shaft rotation angle θC of Link 2.
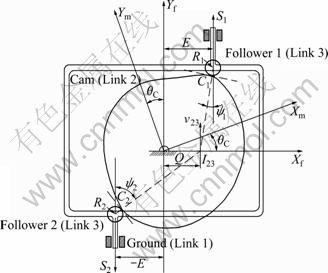
Fig.4 Geometry of breadth cam with reciprocating follower
The contact angles for the upper and lower followers can be given in the following equations:
 (8)
(8)
 (9)
(9)
where left upper-script “f” represents the Sf-coordinate system.
The coordinate of contact points for the upper and lower followers as C1 and C2 under Sm coordinate system can be expressed in terms of the displacement S1 and S2 of the followers:
 (10)
(10)
 (11)
(11)
3.2 Application for reciprocating cam mechanism
The profile design of a breadth cam is built by the proposed solution method. A breadth cam rotates in constant speed, and the followers move to reciprocating displacement with 3-4-5-6 polynomial function in Eq.(12). The design parameters for the cam shape are gave in Tables 1 and 2, and the corresponding cam displacement curves are presented in Fig.5:
 (12)
(12)
where h represents the maximum lift.
Table 1 Displacement conditions for cam 1
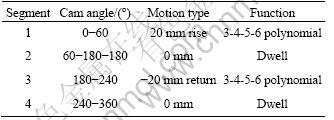
Table 2 Design parameters for cam 1
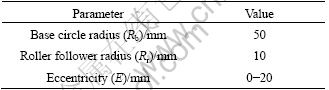
Fig.6 shows a general model for breadth cam mechanism in reciprocating motion. Generally, industrial applications use the geometry of cam mechanisms with an eccentricity, which is defined as a position of the follower axis to the cam axis. The design solutions based on the displacement conditions and design parameters are given in Fig.7(a) for cam profile with no eccentricity (E=0 mm) and Fig.7(b) for profile with eccentricity (E=20 mm).
4 Shape design for breadth cam with oscillating followers
4.1 Design solution for contact points
As can be seen in Fig.8, a breadth cam mechanism has a pair of rollers as followers which can rotate around a pivot. The kinematical constraints must be satisfied that two followers have the same properties (displacement, velocity and acceleration) in the angular motion by the cam rotation. This means that instant velocity centers with the upper follower and lower follower must be the same position, as shown in Fig.8.

Fig.5 Displacement diagram for cam 1
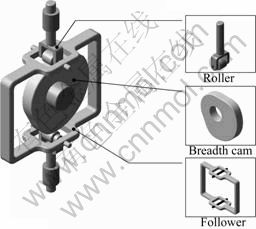
Fig.6 Breadth cam with reciprocating follower

Fig.7 Breadth cam shape with E=0 mm (a) and E=20 mm (b)for cam 1

Fig.8 Geometry of breadth cam with oscillating follower
The contact angles for the upper and lower followers are
 (13)
(13)
 (14)
(14)
where left upper-script “p” represents the Sp-coordinate system.
The coordinates of contact points for the upper and lower followers as C1 and C2 under Sm coordinate system are expressed as
 (15)
(15)
 (16)
(16)
where θC represents the rotating angles of cam.
Fig.9 shows a general model for breadth cam mechanism in oscillating motion with a pair of followers.
4.2 Design constraints
For a general case of breadth cam shape design, it is necessary to define the geometric relationships among the follower length ZL, the radius of cam base circle Rb, and the displacement angular period, based on a specific follower angle θz between two followers. Breadth cam mechanism has five design parameters: Rb, Rr, ZL, Zxy, and θz. On the view of design process, Rr, Zxy, θz are commonly given by the users. Thus, the design parameters ZL and Rb can be derived by the geometric relationships as follows.

Fig.9 Breadth cam with oscillating follower
The follower length ZL can be defined by the triangular relationships between three lengths (ZL, Zxy, Rb+Rr) and the angle θz, when Rb is given as the known parameter:
 (17)
(17)
And for the design case of the known parameter ZL, the radius of base circle of cam is given as
 (18)
(18)
In addition to the design parameters, a displacement curve must be satisfied with the geometric constraints. As shown in Fig.8, two followers must be positioned in the conjugated motions: If the upper follower (R1) locates at the lowest displacement, then the lower follower (R2) is at the highest displacement during the cam rotation.
This means that the period of displacement must be twice of the follower angle θZ. For example, if θZ is 90°, displacement period will become 180°. Thus, the displacement has two periods, and the follower has two times of the oscillating motions during one revolution of the cam. If θz is 60°, the displacement has three periods and each period has 120°.
4.3 Example of breadth cam with no dwell motion
Here, we use the 3-4-5-6 polynomial function in Eq.(12) to design the breadth cam shape. The displacement conditions of the follower motion and the design parameters of the cam mechanism are presented in Tables 3 and 4. The corresponding displacement diagram is depicted in Fig.10.
Table 3 Displacement conditions for cam 2
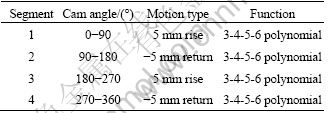
Table 4 Design parameters for cam 2
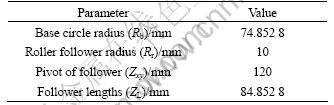
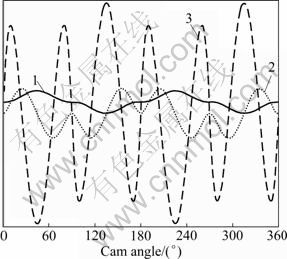
Fig.10 Displacement diagram for cam 2: 1―Displacement; 2― Velocity; 3―Acceleration
In this example, there is no dwell motion. This means that the cam will rotate with no rest. The application of breadth cam profile is given in Fig.11. Also, it is easy to use 3D CAD program to draw a 3-dimensional model of the breadth cam system in order to check the movement of the designed cam mechanism, as shown in Fig.12.
4.4 Example of breadth cam with 20° dwell motion
Here, the 3-4-5-6 polynomial function is also used to design the breadth cam shape with the dwell motion. This part gives the dwell motion in the displacement conditions for designing the cam profile.
The displacement conditions of the follower motion and the design parameters of the cam mechanism are presented in Tables 5 and 6. The corresponding displacement diagram is depicted in Fig.13.
In this example, it uses dwell motion. This means that the cam will rotate with a rest of 20° for each period. The application of breadth cam profile is given in Fig.14. Also, it is easy to use CATIA program to draw a 3-dimensional model of the breadth cam system in order to check the movement of the designed cam mechanism, as shown in Fig.15.
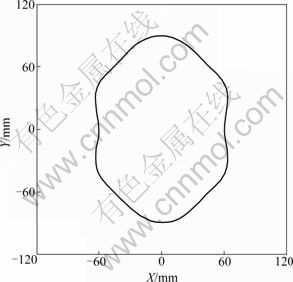
Fig.11 2D model of breadth cam profile for cam 2

Fig.12 3D model of breadth cam mechanism for cam 2
Table 5 Displacement conditions for cam 3

Table 6 Design parameters for cam 3

5 Development of program
A breadth cam designing program was developed by using Microsoft Visual C++ program and MFC languages. The program has the user-friendly connection with the design and dynamic simulation programs for verifying breadth cam. It can plot the track of the design results and simulate the cam motion dynamically.
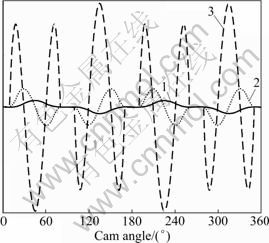
Fig.13 Displacement diagram for cam 3: 1―Displacement; 2― Velocity; 3―Acceleration

Fig.14 2D model of breadth cam profile for cam 3

Fig.15 3D model of breadth cam mechanism for cam 3
For using developed program for the breadth cam, first, the users should define the polynomial functions to form a displacement cycle including rise and return motion by using the program of CamDis R7 to form the displacement diagram. Then by clicking the button browser in Fig.16, it will read the displacement source file successfully.

Fig.16 Automatic design of breadth cam V1 program: (a) Reciprocating motion; (b) Oscillating motion
By inserting the autolisp file into the AutoCAD software, the cam profile can be plotted interactively. The system can be used to design the breadth cam mechanism in the field of engineering simulation, design, and computer aided instruction, which means that it has a great practical and theoretical values.
6 Conclusions
1) The design solutions for breadth cam with a pair of roller followers are presented. The method based on the geometric and velocity relationship at instant velocity center is proposed, and then the coordinates for each contact point are easily found at any instant moment.
2) The general model for reciprocating follower with eccentricity of the follower moving axis and oscillating follower is proposed. The program developed using Microsoft Visual C++ confirms that the cam profiles for the reciprocating and oscillating motion are accurately designed by the computer animation graphically.
References
[1] QIAN Zhi-liang. Research on constant-diameter cam mechanism with a planar motion follower [J]. Mechanism and Machine Theory, 2007, 42(8): 1017-1028.
[2] YE Z H, MICHAEL R S. Synthesis of constant-breadth cam mechanism [J]. Mechanism and Machine Theory, 2002, 37(9): 941-953.
[3] ZAYAS E E, CARDONA S, JORDI L. Analysis and synthesis of the displacement function of the follower in constant-breadth cam mechanisms [J]. Mechanism and Machine Theory, 2009, 44(10): 1938-1949.
[4] QIU H, LIN C J, LI Z Y, OZAKI H, WANG J, YUE Y. A universal optimal approach to cam curve design and its applications [J]. Mechanism and Machine Theory, 2005, 40(6): 669-692.
[5] ZHOU Nai-yue, QIAN Chun-yan. The analysis and design of yoke-cam-activated dobby shedding mechanism [J]. Journal of Suzhou Institute of Silk Textile Technology, 1993, 13(2): 53-60. (in Chinese)
[6] Robert L N. Cam design and manufacturing handbook [M]. New York: Industrial Press Inc, 2001: 393-421.
[7] SHIN J H, KWON S M. On the lobe profile design in a cycloid reducer using instant velocity center [J]. Mechanism and Machine Theory, 2006, 41(5): 596-616.
(Edited by LIU Hua-sen)
Foundation item: Work supported by the Second Stage of Brain Korea 21 Projects
Received date: 2010-04-28; Accepted date: 2010-06-24
Corresponding author: KWON Soon-man, PhD, Associate Professor; Tel: +82-55-213-3629; E-mail: smkwon@changwon.ac.kr

