���ǽ�ͨ�������ԵĽ�����źſ��ƶ�Ŀ���Ż�
����1, 2�����и�2���Ž���1��������1����˸2
(1. ���ϳ���ѧԺ ��ľ����ѧԺ������ ������413000��
2. ��ɳ������ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410004)
ժҪ�������Ӷ��Ľ�ͨϵͳ�����������һ�ֿ��ǽ�ͨ�������ԵĽ�����źſ��ƶ�Ŀ���Ż�ģ�ͼ��㷨���䲽��Ϊ�����ȣ��������е�·����ڶ�Ŀ���Ż�ģ�ͣ�Ȼ�����뽻ͨ�����ߵĽ�ͨ���Ʋ��ԣ�����ģ��������ȷ�����Ż�ָ��Ȩ�أ������Qѧϰ�㷨�����Ҿ��п��������ԣ�����Qѧϰ�㷨�Զ�Ŀ���Ż�ģ�ͽ�����⣬�Ӷ�ʵʱ�������ǽ�ͨ�����߲��ԵĽ�����źſ��Ʒ�����������������������ķ��������ܹ���ַ�ӳ��ͨ�����ߵĿ��Ʋ��ԣ������ܹ���Ч��߽����ͨ��Ч�ʣ���ȴ�ͳ�������������Ŷӳ��ȡ���������ʱ��ͼ���ͣ�����������ƣ����������������Ž�ͨ������������������ԡ�
�ؼ��ʣ���Ŀ���Ż�����ͨ�������ԣ�����ڣ��źſ��ƣ�ģ����������Qѧϰ�㷨
��ͼ����ţ�U491.4 ���ױ�־�룺A ���±�ţ�1672-7207(2014)07-2503-06
Multi-objective optimization based on traffic management strategy for intersection signal controlling
LONG Qiong1, 2, HU Liege2, ZHANG Jinfan1, ZHOU Zhaoming1, PENG Shuo2
(1. School of Civil Engineering, Hunan City University, Yiyang 413000, China;
2. School of Traffic and Transportation, Changsha University of Science & Technology, Changsha 410004, China)
Abstract: A multi-objective optimization model and its algorithm aimed at the intricate demand of traffic system controlling were presented. The procedures were as follows. The traffic controlling strategy was drawn into the model after the model was built. The weight of optimization index was determined based on fuzzy analytic process. The solutions of the multi-objective optimization model were obtained by Q-algorithm, based on the fact that the Q-algorithm is fast constrained and convenient. The program of intersection signal controlling based on traffic management strategy was real-time produced. The simulation results show that the method can not only fully reflect the control strategies of traffic managers, but also improve the travelling efficiency at intersection. Compared with the traditional method, it has some advantages such as the queue length shortened, the time delayed and the number of parking reduced. These advantages are more obvious with the increase of the traffic flow.
Key words: multi-objective optimization; traffic controlling strategy; intersection; signal controlling; fuzzy analytic process; Q-algorithm
���ų����˿������IJ���������������������ˮƽ������ߣ�������������Ѹ������������ʹ��·��ͨ�������ӣ���ͨӵ�����������ԡ���Խ�ͨӵ�����⣬����ͨ����ǿ��ͨ������ʩ�Ľ��������Խ���ģ�������ʵ�ʽ�ͨ״��ʵʱ�Ż���ͨ�źſ��Ʒ�����һ����Ч���⽻ͨӵ�µ��ֶΡ��������Ϊ���н�ͨ�����е���Ҫ��ɲ��֣��dz��н�ͨӵ������Ҫ�����أ����ԣ���Գ��е�·����ڽ�ͨ�źſ������չ�о������ڸ��Ƴ��е�·��ͨӵ��״������ߵ�·ͨ�����������ٽ�ͨ�¹ʡ����ٽ�ͨ������Ⱦ�ȷ������ʮ����Ҫ����ʵ���塣��ͨ�źſ����ǵ���·����ͨ�����е���Ҫ��ͨ������ʩ֮һ��Ӧ���ְ�ȫ��ͨ������Ч�ȶ��Ŀ�����ͼ[1]�����Ż���ͨ�ź�Э�����Ʋ���ʱ����Ҫ���ǽ�ͨ�������ԣ�Ȩ��ƽ������ʱ�䡢�Ŷӳ��ȡ�ͨ��������ָ��[2-3]����ˣ���ͨ�źſ���������һ�����ǽ�ͨ�������ԵĶ�Ŀ���Ż����⡣�����������ö�Ŀ���Ż������о����е�·��ͨ�źſ��������ѳ�Ϊ�о��ȵ㡣���ڵĶ�Ŀ���Ż���Akcelik[4]��F-B ���Ļ���������ͣ������ϵ������ϳ�������ʱ���������ͬ�����ź���ʱ���Ż��̶ȡ�Vincent��[5]��TRANSYT ϵͳΪ��������ʱ���ͣ������ת��Ϊȼ������ָ�꣬������ɽ�����Ŵ��㷨��ģ����⡣������[6]�����˳����Ŷ������·���г�ʱ��ļ�Ȩ��������Ż�ģ�ͣ�����ÿ��Ʋ����������Ե�̽����Ȩ��ϵ�����Ż�Ŀ��֮��ı仯��ϵ��Zeng��[7]����Ԫ������ģ�ͣ�ģ����ڵ�·����ڵ����й��ɣ���������ƽ�������ͨ������Ϊ�Ż�Ŀ��Ķ�Ŀ���Ż�ģ�ͣ�����MOGA��Ŀ���Ŵ��㷨������ģ����⡣�ܳ��ε�[8]���뽻ͨ���Ʊ��Ͷ�Լ�����������Ի���������ƽ������ƽ��ͣ����������ͨ������Ϊ�Ż�Ŀ��ļ�Ȩ����Ż�ģ�ͣ������Ŵ��㷨��ģ�ͽ�����⡣���Ʒ��[1]�Խ����ȺΪ�������˽�ͨ�ź�Э�����Ʋ����Ķ�Ŀ���Ż�ģ�ͣ����ڷ�֧�������Ŵ��㷨�������Ӧ�Ķ�Ŀ���Ż��㷨���ģ�͡����ǣ�����ʵ�ʽ�ͨϵͳ�ĸ����ԺͶ���ԣ���ͨ״�����Ծ�ȷ��������Ŀ���Ż�ģ������ͨ����Ȩ��ת��Ϊ��Ŀ���Ż�ģ�ͽ�����⣬�����˽�ͨ�����߶Խ�ͨ���赼�IJ��Ժ���ͼ������������Ŀ���Ż�ģ������������Ӧʵ�ʸ��Ӷ��ij��е�·��ͨϵͳ��������Ϊ�ˣ��������������Ӷ��Ľ�ͨϵͳ��������ֿ��ǽ�ͨ�����߶Խ�ͨ�赼�Ŀ��Ʋ��ԣ�����ģ��������(fuzzy analytic process��FAP)�����һ�ֳ��е�·������źſ��ƶ�Ŀ���Ż�ģ�ͣ�ͬʱ������Qѧϰ�㷨���п����������Ե�ͬʱ���������˼�����ָ��Ķ�̬�仯������Qѧϰ�㷨�Զ�Ŀ���Ż�ģ�ͽ�����⣬�Ӷ�ʵʱ�������ǽ�ͨ�����߲��ԵĽ�����źſ��Ʒ�����
1 ����FAP�Ķ�Ŀ���Ż�ģ��
1.1 ������Ż�ģ��
����ڽ�ͨ�źſ����Ż�ģ�͵�����ָ��һ��Ϊ��λʱ����ͨ���ij����������������ʱ����̡������Ŷӳ�����̡������ڽ���·�ڵ�ƽ��ͣ���������ٵȣ�����ģ���ݽ�ͨ����Ŀ�깹�����ۺ�������Ͻ�ͨ�����ߵĿ�����ͼ���Խ���ڽ����Ż����ơ��Ե��͵�ƽ��ʮ�ֽ�����е�·��Ϊ��������ѡ���Ŷӳ���l������ʱ��d��ͣ������n��Ϊģ���Ż�����ָ�꣬�����ۺ�����ָ�꺯��Ϊ

 (1)
(1)
ʽ�У�G(k)��ʾ��k�����������ڵĿ��ƺ�����������λ�̵�ʱ���ֱ�Ϊ ��
�� ��
�� ��
�� ��CΪ��������ʱ����
��CΪ��������ʱ���� Ϊ��k+1���������ڿ�ʼʱ�ĵ�i��λ�ij����Ŷӳ��ȣ�
Ϊ��k+1���������ڿ�ʼʱ�ĵ�i��λ�ij����Ŷӳ��ȣ� Ϊ��k+1���������ڿ�ʼʱ��i��λ�Ŷӳ�����ƽ������ʱ�䣻
Ϊ��k+1���������ڿ�ʼʱ��i��λ�Ŷӳ�����ƽ������ʱ�䣻 Ϊ��k+1���������ڿ�ʼʱ�ĵ�i��λ�Ŷӳ�����ƽ��ͣ��������wjΪ��j��ָ�����ۺ�����ָ�꺯���е�Ȩ�أ�
Ϊ��k+1���������ڿ�ʼʱ�ĵ�i��λ�Ŷӳ�����ƽ��ͣ��������wjΪ��j��ָ�����ۺ�����ָ�꺯���е�Ȩ�أ� Ϊ��j��ָ���ڵ�i����λ��Ȩ�ء�
Ϊ��j��ָ���ڵ�i����λ��Ȩ�ء�
ֵ��˵�����ǣ���ģ��(1)�У��Ŷӳ���l������ʱ��d��ͣ������n�����ٲ�ͬ����ʵ�ʲ��������У���Ҫ����ͳһ��һ��������ͬʱ����ģ���У�w j�������˽�ͨ�����߶�ָ�����λ�����ӳ̶ȣ�����ͨ�����ߵ���ʶ�������������Ժ�ģ���ԣ�������ģ�����ĸ��ӳ̶ȡ����Ŀ�������ģ��������(FAP)����ЩȨ��ϵ�������������Ӷ���ͨ�������жϽ�ͨ�Ż�ָ�������Ҫ�Եĸ��ӹ��̣������ָͨ���Ż���������е�һ�������⣬ʹ�Ż�ģ���õط�ӳ��ͨ�����ߵĿ�������
1.2 ����FAP��Ȩ��ϵ��ȷ��
ʵ�������������и����Ժ�ģ���ԣ���ģ������ʾ�жϵĽ���ܹ����õط�ӳ����Ŀ۱��ʡ���ˣ�������Ȩ��ȷ������������ģ����ѧ���ۣ���Ӧ��ģ���������Խ�ͨ�Ż�ģ�ͽ���Ȩ��ȷ������һ�㷽����ȣ�ģ�����������������ж����������Ҫ�Եĸ��ӳ̶ȣ������Ȩ��ȷ�������е�һ�������⡣
����ģ������������Ȩ��ȷ���Ļ���������[9-10]���ڹ���������Ż�ģ�͵Ļ����ϣ��Ծ�����ʽ����������Ż�ָ��������Ҫ�ԣ��Ӷ�������Ӧ��ģ������
 (2)
(2)
�����Ԫ�ذ����µ�ģ����ȷ����
 (3)
(3)
��ģ������F����һ�»�����������ģ��һ�¾���
 (4)
(4)
���У�rij�������·�ʽȷ����
 (5)
(5)
Ȼ�����Ȩ��ȷ����������ģ��һ�¾��������ڽ�ͨ�����߶��Ե�ָ����Ҫ�����Ȩ��(���������Ƚ�)��
 (6)
(6)
���й�һ����ɵ�
 (7)
(7)
��������˼�룬���ڽ�����Ż�ģ��(1)����ͨ�����߸��ݽ�ͨ�������ԣ�����ȷ���Ŷӳ���l������ʱ��d��ͣ������n��ָ��������Ҫ�ԣ��Ϳ�ȷ����Ӧ��ָ��Ȩ��wj (j=1, 2, 3)��ͬ�������ڸ��Ż�ָ���ڲ�ͬ��λ��Ȩ��ϵ�� �������ͨ�����Ʒ���ȷ�����ɴ˿��Կ���������ģ��������������ͨ�����߽��������Ƚ��Ż�ָ��������Ҫ�ԣ�����˽�ͨ�����߸���������ͼ������ָ��Ȩ�صĸ��ӳ̶ȣ��Ҹ÷������ܹ���Ч��֤Ȩ��ȷ�������е�һ�������⡣
�������ͨ�����Ʒ���ȷ�����ɴ˿��Կ���������ģ��������������ͨ�����߽��������Ƚ��Ż�ָ��������Ҫ�ԣ�����˽�ͨ�����߸���������ͼ������ָ��Ȩ�صĸ��ӳ̶ȣ��Ҹ÷������ܹ���Ч��֤Ȩ��ȷ�������е�һ�������⡣
2 ����Qѧϰ��ģ���Ż�
2.1 Qѧϰ�㷨
Qѧϰ�㷨������1989����Watkins�����[11]����ģ���ѧϰ��Ϊ��һ��ǿ��ѧϰ�㷨�����㷨��������������Ժö��ܵ��о��ߵ����ӡ�Qѧϰ�㷨ͨ���ӻ����еõ����͵ķ�������ò�ͬ״̬�µ����Ų��ԡ�Qѧϰ�Ļ��ۻر����� ��ָ��״̬sִ���궯��a��ϣ����õĻ��ۻر�����ȡ���ڵ�ǰ�������ر�����������ʱ�ر���
��ָ��״̬sִ���궯��a��ϣ����õĻ��ۻر�����ȡ���ڵ�ǰ�������ر�����������ʱ�ر���
��Qѧϰ�㷨�У�ģ��ͨ�����Ϸ���ѧϰ�Ż�1�����Ե��������Q�������ѧϰ�����������ij�ʼֵ�������������ѧϰ����Ϊ[12]
 (8)
(8)
ʽ�У� Ϊѧϰ���ʣ�
Ϊѧϰ���ʣ� Ϊ�ۿ����ӣ�aΪ���пɹ�ѡ��Ķ����ļ��ϣ�
Ϊ�ۿ����ӣ�aΪ���пɹ�ѡ��Ķ����ļ��ϣ� Ϊ�ر�����ֵ��
Ϊ�ر�����ֵ�� Ϊ����һ��״̬s��ʱϵͳѡ���κ���Ϊ
Ϊ����һ��״̬s��ʱϵͳѡ���κ���Ϊ ��Q����ֵ��
��Q����ֵ��
Qѧϰ�㷨��ͬ������ѧϰ�㷨[13]���Dz���Ҫ���������ⲿ״̬�����仯��ģ�ͣ��ʺ�������ѧϰ����������Qѧϰ���˹����ܡ�����ѧϰ������ȡ��������о��ɹ����ڴˣ����IJ���Qѧϰ�㷨������⽻��ڵ��źſ����Ż����⡣
2.2 ����Qѧϰ�Ľ����ģ���Ż�
���ݽ����ģ��(1)�����Ʋ������;��߲��������Էֱ����Ϊ��
 (9)
(9)
 (10)
(10)
���У� Ϊ��k�����ڵĿ���������
Ϊ��k�����ڵĿ��������� (����Լ������
(����Լ������ )Ϊ��k�����ڵľ���������
)Ϊ��k�����ڵľ��������� ��
�� ��
�� ��
�� ��
�� �ֱ�Ϊ��k�����ڵĿ�������ʱ���ı�������λ�̵�ʱ��ı�������һ������£���������ʱ���̶�����
�ֱ�Ϊ��k�����ڵĿ�������ʱ���ı�������λ�̵�ʱ��ı�������һ������£���������ʱ���̶����� ������Ʋ���
������Ʋ��� �;��߲���
�;��߲��� �ɼ�Ϊ��
�ɼ�Ϊ��
 (11)
(11)

( ) (12)
) (12)
ͬʱ����ʵ�ʽ�ͨ�źſ����У��źŵ�ʱ��ͨ������(s)Ϊ��λ��ʱ����������Ʋ����� �;��߲�����
�;��߲����� ��Ϊ���������ϡ����Qѧϰ�㷨��Ӧ�ô����˷��㡣
��Ϊ���������ϡ����Qѧϰ�㷨��Ӧ�ô����˷��㡣
����ģ��(1)��������溯�����£�

 (13)
(13)
��Ȩ��ϵ��wj��ȷ���������������[14]�����ԸĽ�����ƻ����Ӧ�Ľ�ͨ�źſ��Ʋ��ԡ�
2.2.1��ʼ���Ʋ���
��ʼ���Ʋ�����ȷ������



 (14)
(14)

�����Ӧ�� ��
�� ��
�� ��
�� ���Ӷ������Ӧ��
���Ӷ������Ӧ�� ��
��
2.2.1 ���̿��Ʋ���
�ڵ�k+1�����ڸ��������ڣ����Ʋ���������¡�
(1) �� ��0����˵������ϵͳ������������ͨ״������ͨ����
��0����˵������ϵͳ������������ͨ״������ͨ����
 (15)
(15)
(2) �� ����˵������ϵͳ���ڷ�ɢ����ͨ״����������
����˵������ϵͳ���ڷ�ɢ����ͨ״����������

 (16)
(16)
����������λi=1, 2, 3, 4������rki��0����˵����ͨ��������������½�ͨϵͳ�������ʱ�����µ������Ʋ��ԣ�������ʽ




 (17)
(17)

�����Ӧ�� ��
�� ��
�� ��
�� ���Ӷ������Ӧ��
���Ӷ������Ӧ�� ��
�� ��
��
������ϵͳֻ�ڲ�����λ������������λ����õ����ƣ���������õ���λ����ΪA��������λ����Ϊ ���������
��������� ��0(
��0( )�����
)�����
 (18)
(18)
ʽ�У� Ϊ�������ӡ���
Ϊ�������ӡ��� �������������λ(
�������������λ( )����
)����
 (19)
(19)
�ɴ˻�����Ӷ�����õ�k+1�����ڵĿ�������������[14]��ȣ������ڴ������˱������� �������˶Խ�ͨ����λ�Ĺ��ȷ�Ӧ����֤�˽���ͨ����λ�������ԡ�
�������˶Խ�ͨ����λ�Ĺ��ȷ�Ӧ����֤�˽���ͨ����λ�������ԡ�
(3) �� ����˵����ͨ����״��û�з����仯����ʱ����Ӧ�Ľ���ڽ�ͨ״���ǣ�������λ��������λ���(�����ϴ���������λ��ͨ״����û�б仯�����)���������(2)�����о�����
����˵����ͨ����״��û�з����仯����ʱ����Ӧ�Ľ���ڽ�ͨ״���ǣ�������λ��������λ���(�����ϴ���������λ��ͨ״����û�б仯�����)���������(2)�����о�����
3 ʵ�����
Ϊ����֤���ķ�������Ч�ԣ��Ե��͵�ʮ�ֽ���·��Ϊ�����������2���붨������з���ʵ�飬���봫ͳ�Ķ�ʱ���Ʒ������жԱȡ�
(1) ���1�������ǽ�ͨ�������ԡ�
�ڲ����ǽ�ͨ���Ʋ��Ե�����£���ͨ�����߶Ը��Ż�ָ�����λ��ƫ�ã���ˣ���ģ��(1)�У�Ȩ��ϵ��ȡֵΪ ��
�� ( j=1, 2, 3; i=1, 2, 3, 4)��
( j=1, 2, 3; i=1, 2, 3, 4)��
(2) ���2�����ǽ�ͨ�������ԡ�
���轻ͨ���������������ͨϵͳ�����������Ż�ָ��������Ҫ��Ϊ���Ŷӳ��������Ҫ�ԣ�����ʱ�������Ҫ��=ͣ�����������Ҫ�ԡ�
ͬʱ��������ͨ����Ҫ�����ȱ��ϴ��ڵ�1�͵�2��λ�ij���ͨ����ͬʱ��˵�3�͵�4��λ����������λ�����Ҫ������Ϊ����1��λ�����Ҫ��=��2��λ�����Ҫ�ԣ���3��λ�����Ҫ��=��4��λ�����Ҫ�ԡ�
����ǰ���Ȩ��ϵ��ȷ�����������

 ��
�� ��j=1, 2, 3
��j=1, 2, 3
ȡ��������C=120 s���������� ���ڲ�ͬ��ͨ�����»�õķ�������ͼ1~3��ʾ��
���ڲ�ͬ��ͨ�����»�õķ�������ͼ1~3��ʾ��
��ͼ1~3���Կ���������������Ķ�Ŀ���Ż������㷨�ܹ��ϴ���ȵ������Ŷӳ��ȡ�����ʱ��ͼ���ͣ���������봫ͳ��ʱ���Ʒ�����Ⱦ������Ե����ƣ������������Ž�ͨ����������������ԡ�
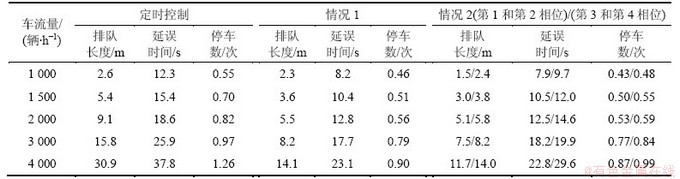
��1��ʾΪ���ֿ���ģ�͵ĸ��־�����ƽ�����ӱ�1���Կ������ڲ�ͬ�����������£����ñ��ķ����ܹ���Ч��С�Ŷӳ��ȡ�����ʱ���ͣ���������������˽�ͨϵͳ������Ч�ʡ��ر�أ��������2��õ�ʵ���������3�͵�4��λ��ȣ���1�͵�2��λ����ͨ�����������ڲ�ͬ�������£���1�͵�2��λ���Ŷӳ��Ƚ϶̣��Ϻõ������˽�ͨ�����ߵĿ�����ͼ��
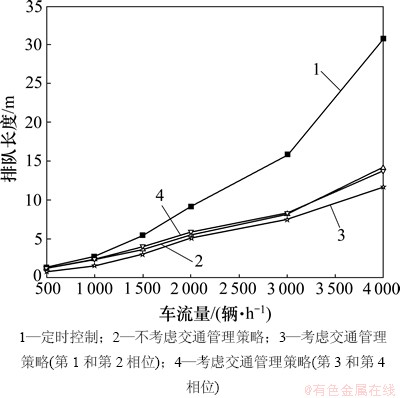
ͼ1 ��ͬ�����������µ��Ŷӳ��ȶԱ�
Fig. 1 Comparison of queue length at different traffic conditions
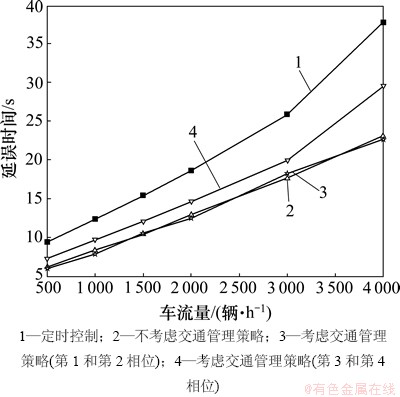
ͼ2 ��ͬ�����������µ�����ʱ��Ա�
Fig. 2 Comparison of delay time at different traffic conditions
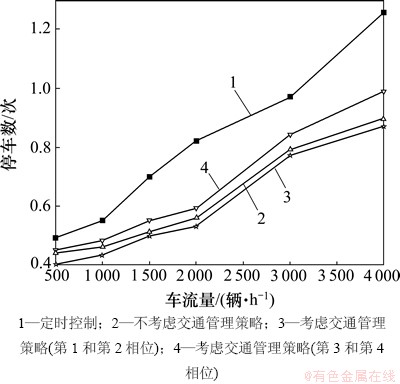
ͼ3 ��ͬ�����������µ�ͣ�������Ա�
Fig. 3 Comparison of number of parking at different traffic conditions
��1 ��ͬ�����������µķ������Ƚ�
Table 1 Comparision of simulation results at different traffic conditions
4 ����
�����Ӷ��Ľ�ͨϵͳ����������ģ�������������һ�ֳ��е�·������źſ��ƶ�Ŀ���Ż�ģ�ͣ�������Qѧϰ�㷨�Զ�Ŀ���Ż�ģ�ͽ�����⣬�÷������������ص㣺
(1) �ڽ�ģ�����У���ֿ����˽�ͨ�����߶Խ�ͨ�赼�Ŀ��Ʋ��ԣ������ڱ����������ͨ������һ���ԡ�
(2) ����ģ��������ȷ���Ż�ָ��Ȩ��ϵ�������������ж����������Ҫ�Եĸ��ӳ̶ȣ������Ȩ��ȷ�������е�һ�������⡣
(3) �����˽���ڶ�Ŀ������ģ�ͣ��˷��������Ż�����Ŀ�굥һ��ȱ�㡣������������ģ���ܹ���˶����Ż�ָ�꣬������н⡣
(4) ����Qѧϰ�㷨�Զ�Ŀ���Ż�ģ�ͽ�����⣬���������̣���֤��������������ԡ�
�ο����ף�
[1] ���Ʒ�, ����, ���, ��. ���е�·�����Ⱥ�ź�Э�����ƶ�Ŀ���Ż������[J]. �й���·ѧ��, 2012, 25(6): 129-135.
GAO Yunfeng, HU Hua, HAN Hao. Multi-objective optimization and simulation of groups of intersections�� signal coordinate control[J]. China Journal of Highway and Transport, 2012, 25(6): 129-135.
[2] DAI Yujie, ZHAO Dongbin. A traffic signal control algorithm for isolated intersections based on adaptive dynamic programming[C]// Proceedings of 2010 International Conference on Networking, Sensing and Control (ICNSC 2010). Chicago, USA, 2010: 255-260.
[3] Abdulhai B. Reinforcement learning for true adaptive traffic signal control[J]. ASCE Journal of Transportation Engineering, 2003, 129( 3) : 278-285.
[4] Akcelik R. Traffic signals: Capacity and timing analysis, ARR No.123[R]. Vermont South, Australia: ARRB Transport Research Ltd, 1981: 26-29.
[5] Vincent R A, Mitchell A I, Robertson D I. User guide of transport, Version 8, TRRL Report LR888[R]. Crowthorne, UK: Transport and Road Research Labortory, 1980: 356-361.
[6] ����, ���Ϊ. ��Ŀ�꽻����źſ���ģ��[J]. ����������ѧѧ��, 2000, 40(6): 653-656.
CHANG Jian, WU Dawei. Multi-objective model of intersection signal control[J]. Journal of Dalian University of Technology, 2000, 40(6): 653-656.
[7] Zeng J Q, Wang J J, Liu K, et al. CTM-MOGA based crossroad traffic signal control[J]. Journal of University of Science and Technology of China, 2005, 35(2): 284-290.
[8] �ܳ���, �콨��. ������ڽ�ͨ��Ŀ����Ʒ���[J]. �����������Ӧ��, 2010, 46(16): 20-22.
CAO Chengtao, XU Jianmin. Multi-objective control method at single intersection[J]. Computer Engineering and Applications, 2010, 46(16): 20-22.
[9] XU Runing, ZHAI Xiaoyan. Extention of the analytic hierarchy process in fuzzy environment[J]. Fuzzy Sets and Systems, 1992, 52: 29-32.
[10] ����ׯ. ģ�������ۼ���Ӧ��[M]. �Ϻ�: �Ϻ���ѧ����������, 1986: 329-332.
WANG Peizhuang. Fuzzy set theory and its applications[M]. Shanghai: Shanghai Science and Technology Press, 1986: 329-332.
[11] Watkins C, Dayan P. Technical note: Q-learning machine learning[M]. Kluwer Academic Publishers, Boston, 1992: 279-292.
[12] κ�S, ����. ����Q-ѧϰ������Ⱥ�㷨������ͨ����ģ��[J]. ϵͳ����ѧ��, 2011, 23(10): 2108-2111.
WEI Yun, SHAO Qing. Regional traffic control model based on Q-learning and particle swarm optimization[J]. Journal of System Simulation, 2011, 23(10): 2108-2111.
[13] ϯ���, Ҷ־��, ����. һ�ֻ�������Ӧ�����˲��Ķ���֪��ѧϰ�㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(4): 1397-1402.
XI Yanhui, YE Zhicheng, PENG Hui. An algorithm for MLPs training based on adaptive particle filter[J]. Journal of Central South University (Science and Technology), 2013, 44(4): 1397-1402.
[14] ����, ��ѫ, ���ж�. ��������Ⱥ�Ľ�BP����������Ԥ��ģ�ͼ���Ӧ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 40(1): 190-194.
CUI Jifeng, QI Jianxun, YANG Shangdong. Combined forecasting model based on BP improved by PSO and its application[J]. Journal of Central South University (Science and Technology), 2009, 40(1): 190-194.
[15] ��Ծ��, ���˾�. һ�ֻ���Qѧϰ�ĵ�·�ڽ�ͨ���Ʒ���[J]. ��ѧ��ʵ������ʶ, 2011, 41(24): 102-106.
[16] MA Yuefeng, WANG Yiju. A traffic control method for single intersection based on Q-learning algorithm[J]. Mathematics in Practice and Theory, 2011, 41(24): 102-106.
(�༭ �²ӻ�)
�ո����ڣ�2013-09-10�������ڣ�2014-11-25
������Ŀ��������Ȼ��ѧ����������Ŀ(51278068)������ʡ�Ƽ���������Ŀ(2012GK3069)������ʡ��Ȼ��ѧ����������Ŀ(07jj6093)
ͨ�����ߣ�����(1967-)��Ů�����ϳ�ɳ�ˣ���ɳ������ѧ����ѧ�ߣ�˶ʿ��������ʦ�����½�ͨ����������о����绰��0737-4628998��E-mail: longqiong@126.com

