ϡ�н��� 1999,(05),394-396 DOI:10.13373/j.cnki.cjrm.1999.05.017
�ԣ���� ���Ͻ����Ա����е�λ���˶�
�Ʋ��� ��ѡ��
���Ϲ�ҵ��ѧ��ĩұ������ص�ʵ����!��ɳ410083,���Ϲ�ҵ��ѧ��ĩұ������ص�ʵ����!��ɳ410083,���Ϲ�ҵ��ѧ��ĩұ������ص�ʵ����!��ɳ410083
ժ Ҫ��
�о���ϸ�� �ԣ骲���� ���쪲�� �ã� ���� �ͣ� �� ���������� �Ͻ��ڳ����Ա��ι����е�λ���˶�����羵������������� �����Ա���ʱ�� �Ͻ��д��ڴ���λ���˶��� �ھ��總���;������γ���λ������ ���ھ����ϳ���λ�������������λ���ǴӾ��缰���� �����Ӵ���������ġ��������˶�̬�ٽᾧ���� ���ֶ�̬�ٽᾧ������λ���ĵͿɶ��Ե���λ���ܶȲ���������ɵġ�������Ϊ�� λ���˶��� �ԣ� ���� ���Ͻ����Ա��ι��̵���ҪЭ��������
�ؼ��ʣ�
�����Ա��� ;λ�� ;��̬�ٽᾧ ;TiAl ���Ͻ� ;
��ͼ����ţ� TG146
�ո����ڣ� �ո�����: 1998 - 10 - 07
���� ������Ȼ��ѧ����;
Dislocation Movement During Superplastic Deformation of Ti 33Al 3Cr 0.5Mo Alloy
Abstract��
Abstract: The microstructure of superplastically deformed Ti 33Al 3Cr 0.5Mo (mass fraction) alloy was observed by transmission electron microscope (TEM) . The observation showed a lot of dislocation pile up and nets at grain boundary, as well as in grains. Furthermore, most of the dislocations were found to originate both from grain boundaries and �� 2 particles which located at grain boundaries and within gamma grains. In addition, the poor mobility of dislocations resulted in their accumulating in gamma grains, and then dynamic recrystallization occured. It is proposed that the superplastic deformation in the present TiAl based alloy is controlled by grain boundary sliding accommodated by dislocation motion and dynamic recrystallization.
Keyword��
Superplastic deformation; Dislocation; Dynamic recrystallization; TiAl alloy;
Received�� �ո�����: 1998 - 10 - 07
������, TiAl���Ͻ�ij����������˹㷺�Ĺ�ע
[1 ,2 ,3 ]
�� ���ֺϽ���950���³��ֳ����Եij����Ա�������; ��1000����, ��ʼӦ������Ϊ3.6��10-4 s-1 ʱ, ����쳤�ʿɴ�305%
[4 ,5 ]
�� ��Щ�������, ����TiAl���Ͻ����õij�����, �п���ʵ�ֳ����Գ���, �Ӷ�Ϊ���TiAl���Ͻ�����������һ����Ҫ;��, ������TiAl���Ͻ��ĵijɹ�����
[6 ]
, ��Ϊ���ֳ��μ���չʾ�����õ�ǰ���� ����, �о��Ͻ�ij����Ա��λ������Ե�ʮ����Ҫ, ��Ϊ���dz����Գ��μ��������ۻ����� Ȼ��, ��TiAl���Ͻ�ij����Ա��λ������о������ࡣ ��Ȼ��Ҷ�һ����Ϊ���绬����TiAl���Ͻ���Ҫ�ij����Ա��λ���, ���Ծ��绬����Э�����̿�����һ�� Imayev��
[1 ]
��Ϊ, ���绬����Э��������λ���˶�, ����λ������ѧģ�ͽ���TiAl���Ͻ�ij�������Ϊ; ��Cheng
[7 ]
��Mishra
[8 ]
����Ϊ, ������ɢ�Ǿ��绬����Э�����̡� ���, �Գ����Ա��λ�����Ҫ���н�һ��������о��� �����о���TiAl���Ͻ����Ա��ι����е�λ���˶�, �����˺Ͻ�ij����Ա��λ�����
1 ���鷽��
�����úϽ������ɷ���Ti-33Al-3Cr-0.5Mo, �Ͻ����������Ժĵ绡¯�������ɡ� Ϊ�˵õ�ϸ����TiAl���Ͻ����, ���������г��� 100 mm��100 mm���� �����п��ٰ������α��ȴ���
[9 ]
�� Ȼ��, �� 1250���½���7 h�� �����ȴ���, �õ�ƽ�������ߴ�Ϊ 10 ��m��ϸ��˫̬��֯TiAl���Ͻ�
�����и����ȡ��������, ��������Ч�ߴ�Ϊ�� 5 mm��20 mm, �������澭����е�⡣ ��������������WD-10D���ܵ���������Ͻ���, ���ú��ͷ���ʷ�ʽ��������, ��������Ϊ: �¶�t =1000��, ��ʼӦ������
�B �� 0 = 2 . 0 �� 1 0 - 4 ? 6 . 0 �� 1 0 - 4 s - 1 �� ����������ʱ, ����ֹͣ����, ��Ѹ�ٽ�������¯��ȡ��, �Ա������ʱ������֯��
��������������ı�ಿλ��ȡСԲƬ, ����˫�������, ������羵�۲졣 ˫������Ϊ-40��, 7~10 mA, 45 V�� ˫��Һ�䷽Ϊ70 ml �ƾ�+120 ml �״�+100 ml ���������Ҵ�+80 ml �����ᡣ ��羵��������H800�͵羵�Ͻ��е�, ������ѹΪ175 kV��
2 ������������
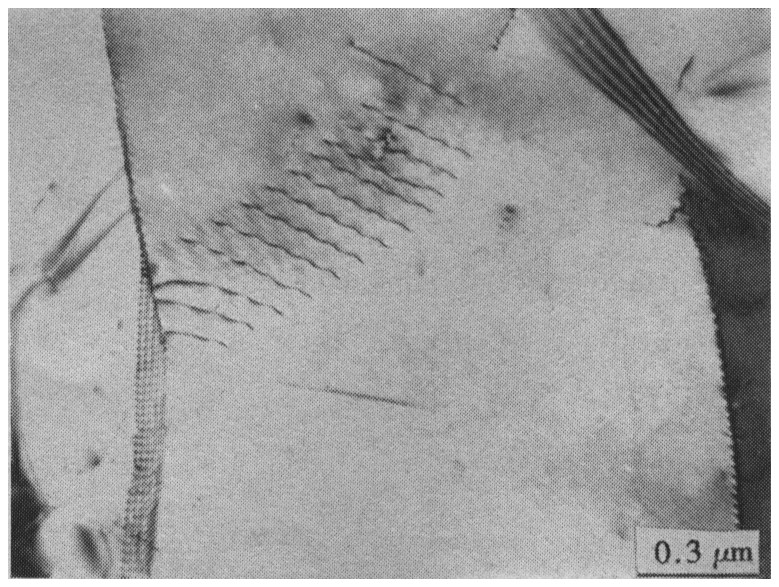
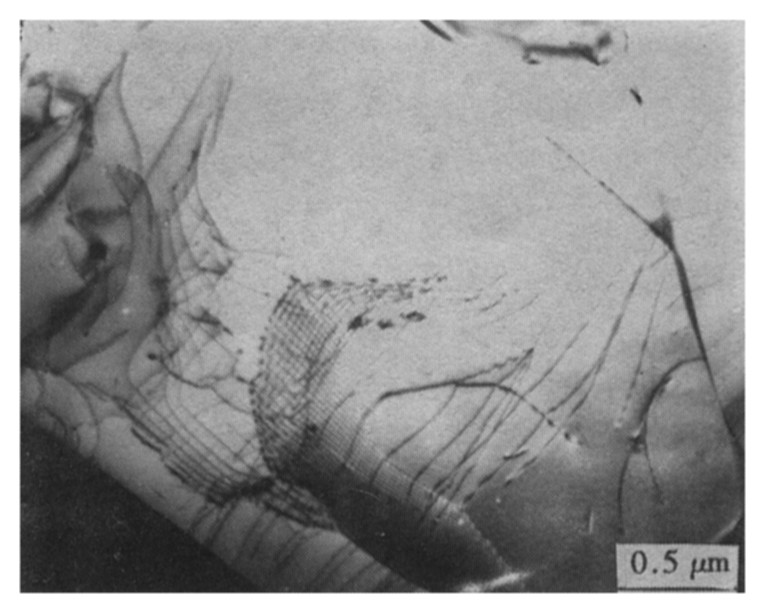
���������Ա��κ�, TiAl���Ͻ������ij������������� ������200%, �����г����˴�����λ��������λ�����硣 TEM�۲����, �� �����ڵ�λ���ھ���ǰ����, �����ڿ������紦�γ���λ������, ��ͼ1��ʾ�� ֵ��ע�����, λ������Ҳ�������� ������, ��ͼ2��ʾ, ����, ͼ2�еIJ���λ���Ǵ����Ͻǵľ��緢���ȥ�ġ� ��Щλ��ͬ�����ڵ�����λ��������Ӧ, �Ӷ��ھ�������һ�� (���½�) �γ���λ�����硣
ͼ1 �����ϵ�λ��������λ������
ͼ2 �þ����ڵ�λ������
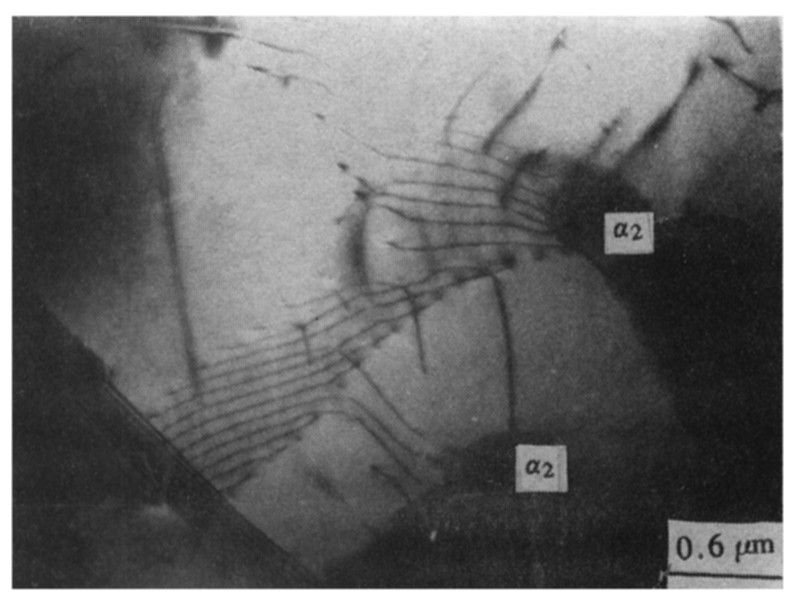
�ڳ����Ա��κ��������, ��2 ������ķֲ��ȱ���ǰ���Ӿ���, ���Dz����ֲ��ھ�����, ���ҷֲ��ھ����ڲ�
[10 ]
�� ��Щ��2 ����������λ��Դ������, ��ͼ3��ʾ�� ��ͼ3���ѿ���, �����ڵĶ�����2 �����ӷ����λ����������������, ���ҿ��ܱ�����������, ��Ϊ�ھ��總��û�г����κ�λ�����硣
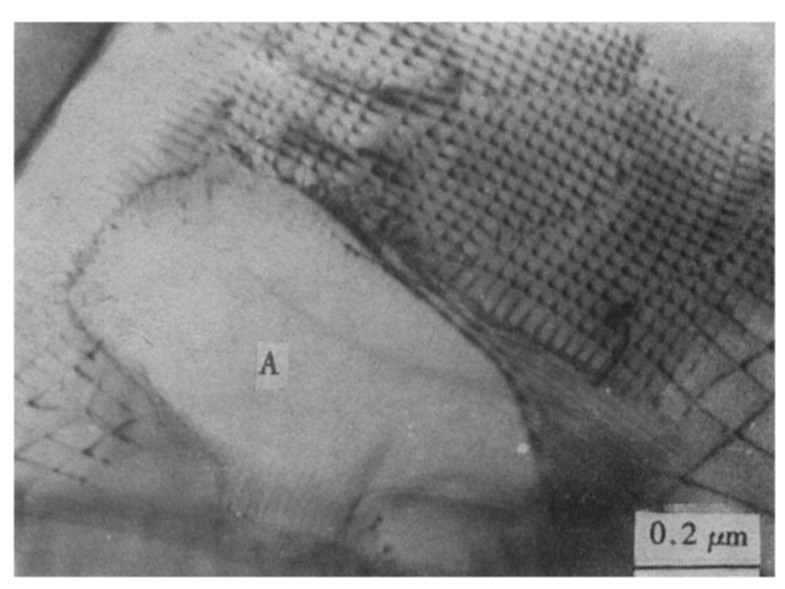
����Щ������, ���������Ǿ��硣 �����е�λ�����������Ǿ�����, �����Ǿ��������, ��ͼ4��ʾ�� ����һЩ������, �ߵ�λ���ܶ������˶�̬�ٽᾧ, �ھ������γ����µ��ٽᾧ����, ��ͼ5�е�A��ʾ�� ��Ȼ, �¾����ǿ����ĸ�λ���ܶȵĻ���������, ����, ������¾������ֳ�����
ͼ3 �þ����ڵĦ�2�����ӷ����λ��
ͼ4 �þ����ڵ��Ǿ���
ͼ5 �þ����ڵĶ�̬�ٽᾧ����
�µ�λ����
�Ѿ�����, TiAl���Ͻ��ڳ����Ա��ι����д���Эͬ���绬��, ������Ⱥ�Ļ���
[11 ]
�� ����, Astania
[12 ]
��Padmanabhan��
[13 ]
��Ϊ, �����Ա���ʱ, ����Ⱥ�Ļ����ȵ��������Ļ�����������, ��Ϊ�ھ���Ⱥ����������, �����и���Ļ��������������Ϊ, ����Ӧ�����Ա���, ���Ҿ���Ⱥ���������Ѱ������绬���͵������������Ա��Ρ� ���, ������Ϊϸ��Ti-33Al-3Cr-0.5Mo�Ͻ�ij����Ա��λ���Ҳ�Ǿ���Ⱥ�Ļ����� ����, �ۺ�ͼ1~3�Ľ��, ���ѷ���λ���˶��Ǿ��绬����Э������, ����Ball-Hutchisonģ��
[14 ]
�Ƚ��Ǻϡ� ��ʵ��, ��TiAl���Ͻ�ij����Ա��ι�����, ����Ⱥ�Ļ���������ij���ϰ��������谭, ������Ӧ��Ӳ���� Ϊ���ɳ���ЩӦ��Ӳ��, ���Ӿ��紦�ͦ�2 �����Ӵ�����λ��, ��ͼ2�� 3��ʾ�� һ����, ������Щλ�����Դ��������˶������澧����, ���뾧�緢����Ӧ, �γɴ����Ŀɶ�����λ��, �ⷴ��������ǿ�˾��绬���;���Ǩ�ƵĽ��С� ��λ���ڴ�Խ���ڵĹ�����������2 ������, Ҳ�����ڦ�2 �����Ӵ���������, Ȼ���ټ������˶��� ��һ����, λ���˶������γ��Ǿ���, ��ͼ4��ʾ�� Ȼ��, �Ǿ��粻����������λ��, ʹ�Ǿ������ݻ�ΪС�Ǿ���, ������Ǿ���, ����Ϊ���绬��������������
��TiAl���Ͻ�ij����Ա��ι�����, ��̬�ٽᾧҲ������Ҫ����, �Ǿ���Ⱥ��������һ��Э�����ơ� ��̬�ٽᾧ��TiAl���Ͻ���±���ʱ����Ҫ����֮һ
[15 ]
�� TiAl���Ͻ���֮��������������̬�ٽᾧ, ����Ϊ�����ܵͺ�λ���Ŀɶ��Ե�, λ�������˶��� ����, ����Щ������, λ���IJ��ϻ��۵���λ���ܶȴﵽ��������̬�ٽᾧ�κ˵ij̶�, ��ͨ����̬�ٽᾧʹ����ϸ��, �ɳ۾ֲ���Ӧ�����С� �ڳ����Ա��ι�����, ���־���ϸ�������¶�����ľ����ֻ��ﵽһ����ƽ��ʱ, ��ʹ����֯���Ӿ���, �Ӷ������ڳ����Ա��εĽ��С� ����, ��̬�ٽᾧ����ľ���Ǩ��, ���γ������Ǿ���, ��Щ��Ǿ���Ծ��绬���Ľ����Ƿdz������ġ� ���, ��̬�ٽᾧҲ��TiAl���Ͻ����Ա��λ��� ���� ���绬����Э������֮һ��
3 �� ��
���������Ա��κ�, Ti-33Al-3Cr-0.5Mo�Ͻ��з����д���λ���˶�, ���γ���λ��������λ�����硣 ����, ����λ���ǴӾ���ͦ�2 �����Ӵ�����ġ� ����Щ������, λ���˶������˶�̬�ٽᾧ, ������һЩ������, ���γ����Ǿ��硣 ���, ϸ��Ti-33Al-3Cr-0.5Mo�Ͻ�ij����Ա��λ����Ǿ��绬��, ��Э��������λ���˶��Ͷ�̬�ٽᾧ��
�����
[1] �� Imayev R M, Kaibyshev O A, Salischev G A. Acta Met��all. Mater, 1992 , 40 (3) :581
[2] �� Wajata Tet al. I S I J International, 1993 , 33 (8) :884
[3] �� Lee W B, Yang H S, Mukherjee A K. Mater. Sci. Eng ., 1995 , A192�_193 :733
[4] ���ܿƳ�, �Ʋ���, ��ѡ�ԵȪ��ȼӹ�����, 1998 , 3 :5
[5] �� Zhou Kechao , Huang Baiyun , Qu Xuanhui et al. Trans. Nonferrous Met. Soc . China .1998 , 8 (2) :269
[6] �� Koeppe C et al. Mater. Sci. Eng ., 1995 , A201 :182
[7] �� Cheng S Cet al. Metall. Trans., 1992 , 23 A:1509
[8] �� Mishra R S, Lee W B, Mukherejee A K. In : Gam ma Ti��tanium Aluminides, ed .by Kim Y W, Wagner R. Yamaguch M. The Minerals , Metals and Materials Society, Warrendale , P A, 1995 .571
[9] �� Huang Baiyun , He Yuehui, Zhou Kechao et al. Mater. Sci. Eng ., 1997 , A239�_240 :709
[10] ���ܿƳ�, �Ʋ���, ��ѡ�ԵȪ�ϡ�н��������빤��, 1998 , 27 (6) :336
[11] �� Zelin M G, Lee W B, Mukherjee A K. J. Mater. Res ., 1994 , 9 (10) :2476
[12] �� Astania V V, Kaibyshev O A, Raizova S N. Acta Met��all. Mater., 1994 , 42 (8) :2617
[13] �� Padmanabhan K A, Schlipf J. Mater. Sci. Technol., 1996 , 12 (5) :394
[14] �� Ball A, Hutchison M M. J. Metal. Sci., 1969 , 3 :1
[15] �� Zhou Kechao , Huang Baiyun , Qu Xuanhui. Trans. Non��ferrous Met. Soc . China , 1998 , 8 (3) :437