Optimal fuzzy PID controller with adjustable factors based on flexible polyhedron search algorithm
来源期刊:中南大学学报(英文版)2002年第2期
论文作者:谭冠政 肖宏峰 王越超
文章页码:128 - 133
Key words:optimal; fuzzy inference; PID controller; adjustable factor; flexible polyhedron search algorithm; intelligent artificial leg
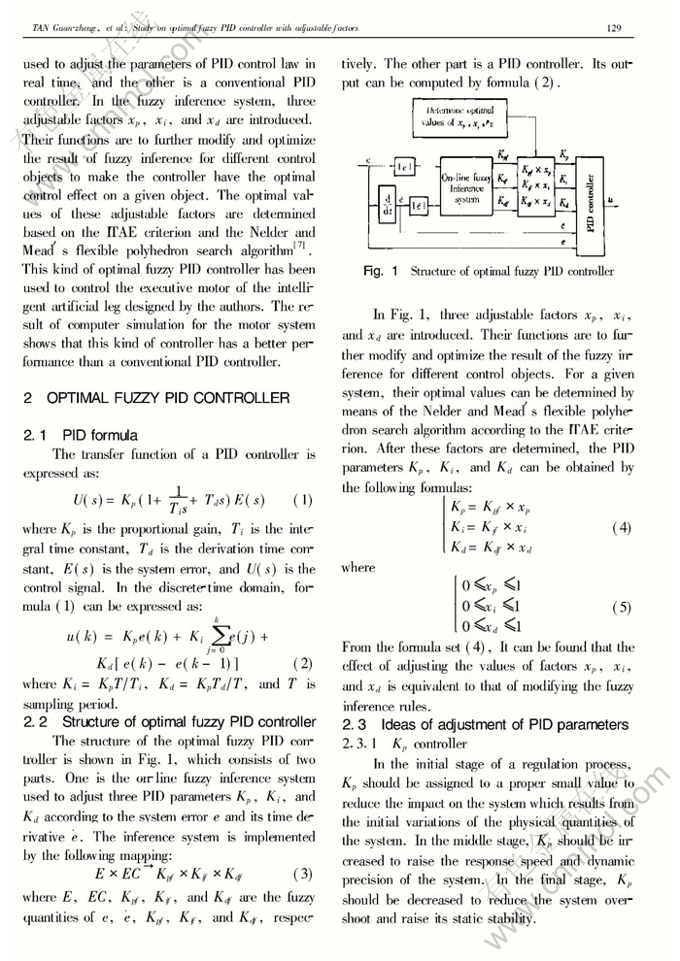
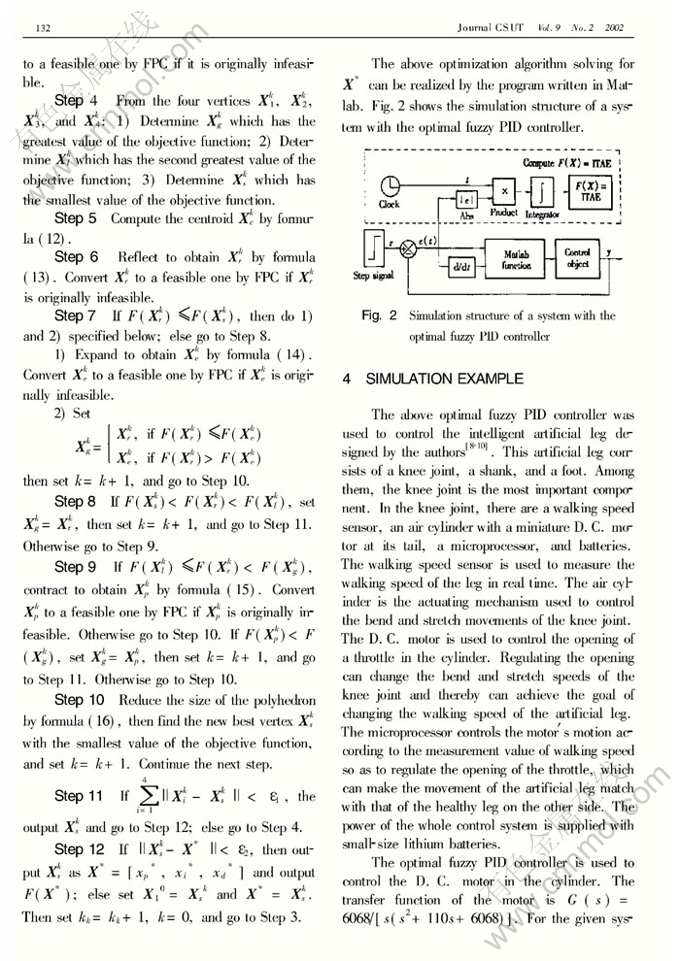
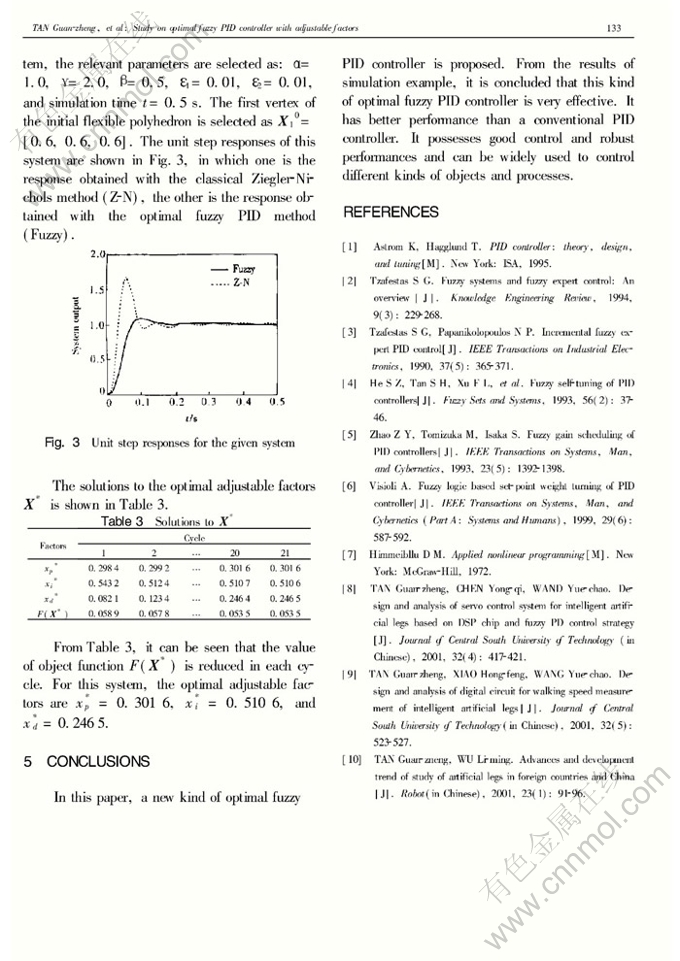
Abstract: A new kind of optimal fuzzy PID controller is proposed, which contains two parts. One is an online fuzzy inference system, and the other is a conventional PID controller. In the fuzzy inference system, three adjustable factors xp,xi, and xd are introduced. Their functions are to furthermodify and optimize the result of the fuzzy inference so as to make the controllerhave the optimal control effecton agiven object. The optimal values of these adjustable factors are determined based on the ITAE criterion and the Nelder and Mead′s flexible polyhedron search algorithm. This optimal fuzzyPID controller has been used to control the executive motor of the intelligent artificial leg designed by the authors. The result of computer simulation indicates that this controller is very effective and can be widely used to control different kinds of objects and processes.