����ͬ�����������Ӧģ���ն˻�ģ�ٶȿ���
��һ��1, 2������1��ţ��1������1
(1. ��ɽ��ѧ ��ҵ��������ƹ��̺ӱ�ʡ�ص�ʵ���ң��ӱ� �ػʵ���066004��
2. �����������װ�������չ��̼����о����ģ��ӱ� �ػʵ���066004)
ժҪ���������ͬ����������������ᾧ����ϵͳ�Ե���ٶȵĸ߾���Ҫ�����һ������Ӧģ���ն˻�ģ�ٶȸ��ٿ��Ʒ��������÷������ն˻�ģ�����������������ٶȿ��������������ϵͳ�������ٶȣ����ұ��ͳ�ն˻�ģ���ڵ������붶�����⣻���ǵ�����ת��ʱ��������Ϊ��ǿϵͳ�������Ŷ���������ͬʱΪ�����������еĶ��������������Ӧģ���㷨�Զ�������ͺ��и���ת�ص�δ֪�������й��ơ�ͨ��Lyapunov�ȶ�������֤��ϵͳ���ȶ��ԡ����ķ������������ÿ��Ʒ����ܹ��ڸ��ظ�����ʵ�ֿ���ȷ���ٶȸ��ٿ��ƣ��������Ķ���Ҳ�õ����ƣ�ϵͳ�Ը����Ŷ����н�ǿ��³���ԡ�
�ؼ��ʣ�����ͬ��������ٶȿ��ƣ��ն˻�ģ�������ɣ�����Ӧģ������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2013)12-4855-06
Speed control with adaptive fuzzy terminal sliding mode for permanent magnet synchronous motor
FANG Yiming1, 2, YU Xiao1, NIU Ben1, LIU Le1
(1. Key Laboratory of Industrial Computer Control Engineering of Hebei Province,Yanshan University, Qinhuangdao 066004, China;
2. National Engineering Research Center for Equipment and Technology of Cold Strip Rolling, Qinhuangdao 066004, China)
Abstract: In the system of continuous casting mold oscillation driven by PMSM, the method of adaptive fuzzy terminal sliding mode control was proposed for the high precision requirement of motor speed tracking control. The speed controller was designed by using the non-singular terminal sliding mode and reaching law. And the proposed scheme can not only improve convergence rate, but also eliminate the problem of singular and chattering which exist in the traditional terminal sliding mode. In view of time-varying load torque, adaptive fuzzy algorithm was used to approximate second-order derivative term and unknown function with load torque, which can eliminate second-order derivative term in the control law and improve the ability of system to resist load disturbance. And the stability of system was also proved by the lyapunov stability theory. Finally, the simulation results show that this control method can achieve quick and accurate speed control with load disturbance, the chattering of control output is effectively attenuated, and the system has strong robustness for the load disturbance.
Key words: permanent magnet synchronous motor; speed control; terminal sliding mode; reaching law; adaptive fuzzy
����ͬ�����(PMSM)���ڽṹ���ա����С�������ᡢ�߹����ܶȡ���ת����ĵ��������Զ����㷺Ӧ�õ����ֹ�ҵ���ϡ����ǣ�����ͬ�������һ�������ԡ�ǿ��ϵ�ϵͳ����ʵ�������л������Ų����㶯�����ظ��ŵȲ�ȷ���ԣ����Գ����PI�����Ѿ�������������ܿ��Ƶ�Ҫ�������ִ��������۵ķ�չ��Խ��Խ����¿������۱�Ӧ�õ�����ͬ������Ŀ����У������������[1]��ģ������[2]������Ӧ����[3]�ȡ����У���ģ��������Բ����仯���ⲿ�Ŷ�����ǿ³���ԣ��������Ϊѧ�����о����ȵ�[4-11]����������������ѧ�߾ͻ�ģ������PMSM�е�Ӧ�ý����˴����о�����ȡ���������о��ɹ�[4-6]���ֺ�ƽ��[4]�����������ɵĻ�ģ����Ӧ�õ�����ͬ�����ֱ��ת�ؿ����У���Ч�ظ�����ϵͳ�Ķ�����̬�������ܡ���������[5]��������ɷ�����˱������ģ���Ʒ�����Ӧ�õ�����ͬ���������ϵͳ�У������һ�㻬ģ�����п���������ȡ���������������Χ�����ĸ��������⣬���ϵͳ�Ŀ����Ժ�³���ԣ������[6]������ʱ�们ģ���뵽����ͬ��������ٶȿ���������У���ǿ��ϵͳ�Ŀ��������������ǣ���������ģ������ϵͳ��״̬������ʱ���ƽ��㣬��Ҫ��ýϿ�������ٶ���Ҫ�����л����棬������л������ֻ�������صĶ���Ϊ�˽������ʱ�����⣬Man��[7]������ն˻�ģ���ƣ����ܹ�ʹϵͳ״̬������ʱ���ڵ���ƽ��㣬�������������⡣Feng��[8]����ķ������ն˻�ģ���ƴӸ����Ͻ���˴�ͳ�ն˻�ģ���ڵ��������⡣����������2���ն˻�ģ��ƵĿ�������Ȼ�������صĶ�������������⣬Yu��[9]�����һ�������������ն˻�ģ���ƣ������������������⣬������ƵĿ����ɶ�ʱ�������������˿��ƵĶ������⡣���������������ͬ����������������ᾧ����ϵͳ�еĵ���ٶȿ���[12]�������һ������Ӧģ���ն˻�ģ���Ʒ���������Yu��[9]��������ն˻�ģ�����ٶȿ���������ƣ����ǵ�����ͬ��������������ᾧ�������为��ת���Dz��ϱ仯�ģ�Ϊ����ǿϵͳ��³���ԣ�ͬʱΪ�������������еĶ��������������Ӧģ���㷨[13-14]�Կ������ж�������ͺ�����ת�ص�δ֪�������бƽ���ͨ��Lyapunov�ȶ������۽������ȶ��Է���������PMSM�ٶȿ���ϵͳ�����˶Աȷ����о���ͨ��ʵ�����ıȽϣ���һ����֤�����᷽������Ч�ԡ�
1 PMSM��ѧģ��
����ͬ�������������ת����ϵ(d-q)�µ���ѧģ��[5]��
 (1)
(1)
ʽ�У�ud��uq�ֱ�Ϊ���ӵ�ѹd��q�������id��iq�ֱ�Ϊ���ӵ���d��q�������LΪ���������Ч��У���fΪת������������Ĵ�����RsΪ���ӵ��裻pΪ��������JΪת��ת��������BΪ���Ħ��������TLΪ����ת�أ���Ϊת�ӵĽ��ٶȡ�
����ͬ�������ʵ�����������ᾧ�����У����Ļ�е�����Dz��ϱ仯�ģ�������ѧģ���еĸ���ת��TL��һ��δ֪�ĺ�����
���潫��������ͬ���������ѧģ�ͣ������ն˻�ģ�����ٶȿ���������ƣ�����������Ӧģ���㷨�Զ�������ͺ��и���ת�ص�δ֪�������й��ơ�
2 PMSM����Ӧģ���ն˻�ģ�ٶȿ��������
2.1 �����������ն˻�ģ
��������[9]�з������ն˻�ģ�棺
 (2)
(2)
ʽ�У��£�0��1���ã�2��ʽ(2)���������ģ������ɵã�
 (3)
(3)
����ϵͳ�ij�ʼ״̬Ϊx(0)=x0����״̬x��������ʱ�����������㣬����ʱ��Ϊ��
 (4)
(4)
Ϊ��ʵ���������ն˻�ģ���ƣ�ѡȡ�����ն˻�ģ�����ɣ�
 (5)
(5)
���У�1���ѣ�1��k1��k2��0��
2.2 PMSM�ն˻�ģ�ٶȿ��������
����ٶ�ϵͳ���ض���ı���ʽΪ��
 (6)
(6)
���ٶȸ����ź�Ϊ��*�������ٶ����Ϊe=��*-�أ�����ʽ(6)�ɵ��ٶ����ϵͳ��
 (7)
(7)
����ǰ�����Ḻ��ת��TL��ʱ��ģ�������ɵ�����
 (8)
(8)
��x=e��ͨ��ѡȡ��ģ��(2)��������(5)������ʽ(3)��ʽ(8)�ɵ��ٶȿ������Ŀ����ɣ�
 (9)
(9)



����1 ����PMSM�ٶ�ϵͳ(6)��ѡȡ��ģ��(2)��������(5)����ƿ�����(9)����ϵͳ��ȫ������ʱ�������ġ�
ע1[9] �ٶ�Lyapunov����V(x)���㲻��ʽ��
 (10)
(10)
���У��ģ�0�� ��0��0���ˣ�1����ϵͳ��ȫ������ʱ�������ġ�����ʼ״̬��x0���������������ʱ��Ϊ��
��0��0���ˣ�1����ϵͳ��ȫ������ʱ�������ġ�����ʼ״̬��x0���������������ʱ��Ϊ��
 (11)
(11)
֤����ѡȡLyapunov����Ϊ
��V1�ã�




���� ��
�� ��
��
��ʽ(10)��֪ϵͳ��ȫ������ʱ�������ģ�����ʱ���ǣ� ��
��
2.3 ����Ӧģ������
������ͬ��������������ᾧ�����У�����ת��TL�Dz��ϱ仯�ģ��Һ��ѻ�ã���� ��һ��δ֪�ĺ�����ͬʱΪ��������������
��һ��δ֪�ĺ�����ͬʱΪ�������������� �������ɣ���������Ӧģ����ϵͳ�����бƽ���
�������ɣ���������Ӧģ����ϵͳ�����бƽ���
��������ģ������⣺
Rj����x1Ϊ ������xnΪ
������xnΪ ����yΪGj
����yΪGj
���У�Rj��ʾ��j��ģ������j=1��2������k��ģ������������Gj�Ƕ����ģ������ֵ������һԪģ�������˻���������Ȩƽ����ģ��������������Ϊ��˹������ģ��ϵͳ���Ա���Ϊ��
 (12)
(12)
���У� Ϊ�ɵ�����������
Ϊ�ɵ�����������
 Ϊģ��������������
Ϊģ��������������

 ��
�� Ϊ��˹�����Ⱥ�����
Ϊ��˹�����Ⱥ����� ��DxΪ������i=1��2������n��
��Dx������i=1��2������n��
�������ܱƽ�����[15]������ģ����ϵͳ �ƽ��ң�
�ƽ��ң�
 (13)
(13)
���� ������ģ����������Ϊ��
������ģ����������Ϊ��
 (14)
(14)
����������ģ��ϵͳΪ ������С�ƽ����Ϊ��
������С�ƽ����Ϊ��
 (15)
(15)
ʽ�У�|��|���ǣ���Ϊ������
���ǵ��ƽ������ⲿ���ŵ�Ӱ�죬��Ʒ����Բ����
 (16)
(16)
���У� Ϊ�ǹ���ֵ��
Ϊ�ǹ���ֵ��
�� �ͦǽ�������Ӧ���ƣ�����Ӧ��Ϊ��
�ͦǽ�������Ӧ���ƣ�����Ӧ��Ϊ��
 ��
�� (17)
(17)
ʽ�У���1�ͦ�2Ϊ������
PMSM�ٶȿ����������տ�����Ϊ��
 (18)
(18)

����2 ����PMSM�ٶ�ϵͳ(6)��ѡȡ��ģ��(2)��������(5)����ƿ�����(18)����ϵͳ��ȫ������ʱ�������ġ�
֤����ѡȡLyapunov������
 (19)
(19)
ʽ�У� ��
�� ������
������
�������ɵã�









���У�������ʽ(10)��֪ϵͳ��ȫ������ʱ�������ġ�
3 �����о�
Ϊ����֤���������㷨����Ч�ԣ�������ͬ������ٶ�ʸ������ϵͳ���з����о������Ķ�������ͬ������ķ���ϵͳ���õ����ٶȺ͵���˫�ջ����ƣ����е�������������ͨ��PI���ƣ��ٶȻ��ֱ���ñ������᷽��������Ӧģ���ն˻�ģ���ơ�����2�������������ն˻�ģ���ƺͷ���3����ͨ��PI���ơ����У�����2������[9]��������㷨���ڲ����Ǹ���ת��ʱ�����������÷���2��ƿ�����Ϊ��
 (20)
(20)
���� ��
�� ��
��
��������[12]��֪���ŷ�������������ᾧ��������/������ʱ��������������ٶ�����Ϊ�� ��ʽ�У�iΪ�������Ĵ����ȣ�
��ʽ�У�iΪ�������Ĵ����ȣ� ������fΪ�����ᾧ������Ƶ�ʣ�ȡֵ��ΧΪ0~300��/min��
������fΪ�����ᾧ������Ƶ�ʣ�ȡֵ��ΧΪ0~300��/min�� �����Ц�Ϊ�����ᾧ���IJ���ƫб�ʣ�ȡֵ��ΧΪ-0.4~0.4��
�����Ц�Ϊ�����ᾧ���IJ���ƫб�ʣ�ȡֵ��ΧΪ-0.4~0.4��
����ͬ������IJ���Ϊ��Rs=2.875 ����L=0.033 mH��p=3��B=0.002��J=0.011 kg/m2����f=0.8 Wb�� �����������ΪIqmax=7 A��
�����������ΪIqmax=7 A��
ģ����ϵͳ�������µ������Ⱥ�����

ʽ�У�i=1��j=1��2������7��[c1��c2��c3��c4��c5��c6��c7]=  ��
��
��������ƵĿ������IJ���Ϊ����=1.000 1����=0.6��k1=276��k2=900����=0.006 708����1=3 000����2=1.8�������������ն˻�ģ�������IJ���Ϊ����1=1.08����1=0.5��k11=287��k21=1 000����1=0.006 9�� PI�������IJ���Ϊ��kp=15��ki=4.3��
���ķ�����2��������з��棺
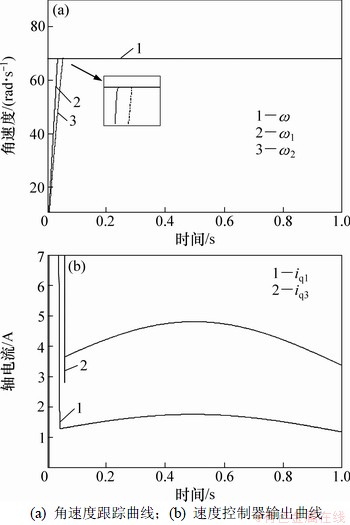
�����ᾧ����������ʱ��i=5��f=130����=0.24��A=0.4�������ĵ�����ٶ�Ϊ����(t)=68.03��[1- 0.4cos(13.61t) rad/s]������������������ź�ת��������������ͼ1��2��ʾ�����Ц�Ϊ�������ٶ����ߣ���1����2�ͦ�3��ʾ���ٶȵĸ������ߣ�iq1��iq2��iq3��ʾ�ٶȿ�������������ߣ��±�1��2��3�ֱ��ʾ���ķ���������2�ͷ���3�Ľ����
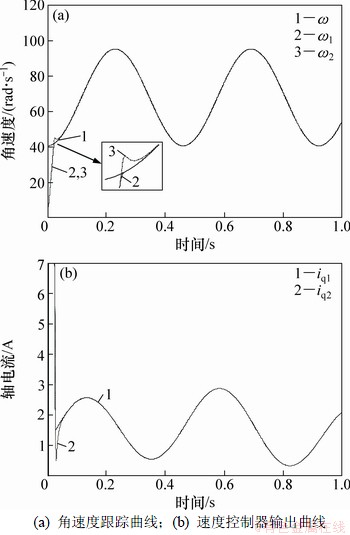
ͼ1 �������᷽���뷽��2�������ź��µ���Ӧ����
Fig. 1 Response curve of proposed algorithm and method 2 for periodic sinusoidal command
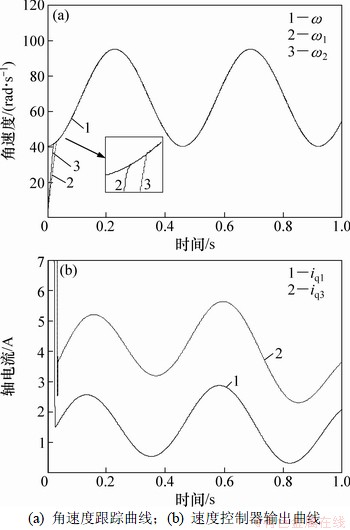
ͼ2 �������᷽���뷽��3�������ź��µ���Ӧ����
Fig. 2 Response curve of proposed algorithm and method 3 for periodic sinusoidal command
(2) �����ᾧ��������ʱ��i=5��f=130����=0��A=0�������ĵ�����ٶ�Ϊ����(t)=68.03 rad/s������������Ľ�Ծ�ź�ת��������������ͼ3��4��ʾ��
��ͼ1(a)��ͼ3(a)���Կ������ڸ����Ŷ����ڵ�����£����۵�������ź���ʱ��Ļ��Ǻ㶨�ģ���������������ն˻�ģ���ƣ��������᷽�������ٶȸ�����������ϵͳ���и��õĶ���̬���ԣ���ͼ1(b)��ͼ3(b)���Կ������������᷽���Ŀ��������������ԱȽ�ƽ�����ɴ˿���˵�����ķ����е�����Ӧģ�����ƶԸ����Ŷ��������õIJ������ã������ϵͳ�������Ŷ���������
��ͼ2(a)��ͼ4(a)���Կ��������۵�������ź���ʱ��Ļ��Ǻ㶨�ģ��������᷽���ڸ����Ŷ��������Ƚ���ͨPI����Ҳ���и���������ٶȣ����⣬��ͼ2(b)��ͼ4(b)���Կ������������᷽���Ŀ�����������ߵIJ���Ҳ��Խ�С�����Ҿ��нϵ͵ĵ�����ֵ����һ����֤������ƵĿ������Ը����Ŷ����н�ǿ��³���ԡ�
���⣬��ͼ1(b)~ͼ4(b)�е�iq1�������߿��Կ��������ķ�����ƵĿ����������ƽ������
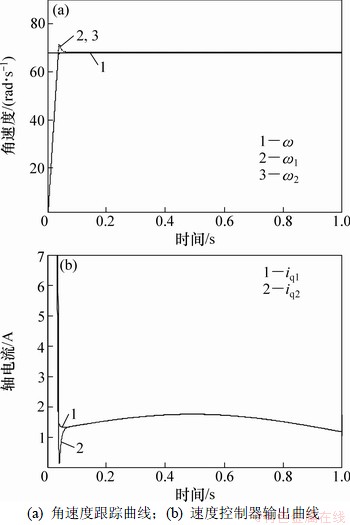
ͼ3 �������᷽���뷽��2�ڽ�Ծ�ź��µ���Ӧ����
Fig. 3 Response curve of proposed algorithm and method 2 for step command
ͼ4 �������᷽���뷽��3�ڽ�Ծ�ź��µ���Ӧ����
Fig. 4 Response curve of proposed algorithm and method 3 for step command
4 ����
(1) �����ն˻�ģ�����ٶȿ���������ƣ������ϵͳ�������ٶȣ��ܹ��ܺõ����ƻ�ģ���ƴ��ڵĹ��ж�������ʹϵͳ�������õĶ���̬���ԡ�
(2) ������Ӧģ���㷨���������������еĶ����������ת��ʱ������IJ�ȷ���ԣ��ȱ����˿������ж�������Ĵ��ڣ�Ҳ��ǿ��ϵͳ�Ը����Ŷ���³���ԣ�ʹϵͳ�ڸ��ظ�������Ȼ�ܹ�����ȷ�ĸ��ٸ����źš�
�ο����ף�
[1] ��٩, �¾�. ��������Ӧ����Ԫ��������ı���ʽ����ͬ������������߱�ʶ[J]. �й��������ѧ��, 2010, 30(30): 68-73.
LIU Kan, ZHANG Jing. Adaline neural network based online parameter estimation for surface-mounted permanent magnet synchronous machines[J]. Proceedings of the CSEE, 2010, 30(30): 68-73.
[2] Jung J W, Choi Y S, Leu V Q, et al. Fuzzy PI-type current controllers for permanent magnet synchronous motors[J]. IET Electr Power Applications, 2011, 5(1): 143-152.
[3] Choi H H, Leu V Q, Choi Y S. Adaptive speed controller design for a permanent magnet synchronous motor[J]. IET Electr Power Applications, 2011, 5(5): 457-464.
[4] �ֺ�ƽ, ���濵. ����ͬ�������ģ��ṹֱ��ת�ؿ���[J]. �繤����ѧ��, 2006, 21(1): 1-6.
JIA Hongping, HE Yikang. Variable structure sliding mode control for PMSM DTC[J]. Transactions of China Electrotechnical Society, 2006, 21(1): 1-6.
[5] ������, �ܲ�, ��˹�. ����ͬ���������ϵͳ�Ļ�ģ����[J]. �繤����ѧ��, 2009, 24(9): 71-77.
WANG Haibo, ZHOU Bo, FANG Sichen. A PMSM sliding mode control system based on exponential reaching law[J]. Transactions of China Electrotechnical Society, 2009, 24(9): 71-77.
[6] ����, ����, ����. ���ڻ���ʱ�们ģ���Ƶ�����ͬ���������ϵͳ[J].�繤����ѧ��, 2011, 26(6): 56-61.
CHEN Zhen, GENG Jie, LIU Xiangdong. An integral and exponential time-varying sliding mode control of permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 56-61.
[7] Man Z H, Palinski A P, Wu H R, et al. A robust MIMO terminal sliding mode control for rigid robotic manipulators[J]. IEEE Transactions on Automatic Control, 1994, 39(12): 2464-2468.
[8] FENG Yong, YU Xinghuo, MAN Zhihong. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167.
[9] YU Shuanghe, YU Xinghuo, Shirinzadeh B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
[10] ֣����, ����, ½����. ����ͬ������ĸ߽��ն˻�ģ���Ʒ���[J]. ����������Ӧ��, 2009, 26(6): 697-700.
ZHENG Jianfei, FENG Yong, LU Qiliang. High-order terminal sliding-mode control for permanent magnet synchronous motor[J]. Control Theory & Applications, 2009, 26(6): 697-700.
[11] ������, �Կ�, ����. ����ͬ���綯����Ϸ������ն˻�ģ��ṹ����[J]. �й��������ѧ��, 2011, 31(18): 61-66.
ZHANG Xiaoguang, ZHAO Ke, SUN Li. Hybrid nonsingular terminal sliding mode control for permanent magnet synchronous motor drive system[J]. Proceedings of the CSEE, 2011, 31(18): 61-66.
[12] ���ܿ�, ��һ��. �ŷ���������������ᾧ������������װ��: �й�, ZL200510060032.1[P]. 2007-05-30.
LI Xiankui, FANG Yiming. Non-sinusoidal oscillation mechanism driven by servo-motor in continuous casting: China ZL200510060032.1[P]. 2007-05-30.
[13] Wai R J, Lin C M, Hsu C F. Adaptive fuzzy sliding-mode control for electrical servo drive[J]. Fuzzy Sets and Systems, 2004, 143(2): 295-310.
[14] Salim L, Mohamed S B, Thierry M G. Adaptive fuzzy control of a class of MIMO nonlinear systems[J]. Fuzzy Sets and Systems, 2005, 151(1): 59-77.
[15] Wang L X, Mendel J M. Fuzzy basis functions, universal approximation, and orthogonal least squares learning[J]. IEEE Transactions on Neural Networks, 1992, 3(5): 807-814.
(�༭ �°���)
�ո����ڣ�2013-03-16�������ڣ�2013-06-13
������Ŀ��������Ȼ��ѧ����ίԱ���뱦�ּ�������˾����������Ŀ(U1260203)���ӱ�ʡ��Ȼ��ѧ������������о�����������Ŀ(F2013203291)
ͨ�����ߣ���һ��(1965-)���У����������ˣ����ڣ���ʿ����ʦ����������Ӧ³������������Ӧ�á�ұ���Զ����ȷ�����о����绰��0335-8057041��E-mail��fyming@ysu.edu.cn

