DOI: 10.11817/j.issn.1672-7207.2019.05.012
��������ģ��Ԥ��ĵ��ģ�������ϵ������ٷ���
�����������������������
(�����ͨ���ܿ����밲ȫ������ʡ�ص�ʵ���ң����ϴ�ѧ �Զ���ѧԺ������ ��ɳ��410083)
ժҪ�������������µ��ģ�������ٶ��ӵ�����̬��Ӧ�������ȵͣ�Ϊ�˽����һ���⣬���һ�ֻ�������ģ��Ԥ��Ĺ��ϵ������ٷ��������ȣ����������źŵ����Ĺ���ע���������ݸ���ָ���趨Ԥ��������IJο������źţ�Ȼ�������ģ�������ص���Ԥ��ģ�ͣ���ÿһ�����������ڣ��������п���״̬�¸��ص�����Ԥ��ֵ����������ۺ���������ÿһ��������Ӧ�����ۺ���ֵ��ѡȡ��С���ۺ���ֵ��Ӧ�������ڵĿ���״̬��Ϊ���ģ������һ���������ڵĿ���״̬���о������������������ķ���������Ч�ظ��ٵ��ģ�������ϵ������봫ͳPI������ȣ���̬��Ӧ�ٶȸ��죬���پ��ȸ��ߡ�
�ؼ��ʣ����ģ����������ע�룻����ģ��Ԥ�⣻��������
��ͼ����ţ�MT343+.3 ���ױ�־�룺A ���±�ţ�1672-7207(2019)05-1098-07
Fault current tracking method of motor simulator based on finite set model prediction
PENG Tao, LIU Bo, YANG Chao, QIN Rui, YANG Chunhua
(School of Automation, Hunan Provincial Key Laboratory of Energy Saving Control and Safety Monitoring for Rail Transportation,
Central South University, Changsha, China 410083)
Abstract: Aiming at the problem of slow dynamic response and low accuracy during the process of tracking motor fault stator currents by motor simulator, a fault current tracking method based on finite set model prediction(FSMP) was proposed. First, the fault injector based on signal conditioning was constructed, and the reference current signal of the predictive controller was set according to the given instruction. Then, the load current prediction model of motor simulator was set up, and the prediction value of the load current in all switching states was calculated in each sampling period. Finally, the evaluation function was constructed, and the corresponding evaluation function value of each sector was calculated. The switch state in the sector corresponding to the minimum evaluation was used as the switch state of the next sampling period of the motor simulator. The research results show that fault current of motor simulator can be effectively tracked by the proposed method. Compared with the traditional PI regulation, the dynamic response of proposed method is faster and the tracking precision is higher.
Key words: motor simulator; fault injection; finite set model prediction(FSMP); current tracking
�����Ϊ��Ҫ�����豸���㷺Ӧ���ڹ�ũҵ�������������Ƽ����ճ�����ȸ������������������ʱ��������Ӱ�������Ŀɿ��ԣ����һ����ظ�����������ϵͳ������������������Σ��������ȫ����ˣ�����Ĺ�������һֱ�����ǹ�ע�Ľ���[1-3]���ڴ�ͳ�IJ���ƽ̨�У��о��������������Ҫ������������ʵ����[4]�������ڽ����ظ���ʵ�飬��ˣ����ǶԵ���������Եķ����о������ע������ӵ�������[5]�����ģ������SLATER�����[6]����һ��ͨ���Ա�Ƶ���˿ڵ����Ŀ���ʹ�������ʵ�ʵ����ͬ�˿ڵ������Ե�װ��[7]������[8]�У�������ת����ϵ�����첽����Ķ�̬��ѧģ�ͣ�ʵ�ֵ��ģ�͵�����ʵʱ����͵��ģ�������ص����ĸ��ٿ��ơ�����[9]�У�����LCL�ṹ��Ϊ���ģ�������أ���һ���̶�������˸��ص������ٵ�ȷ�ԡ�����[10]��������������ṹ�����ͳ��Ƶ�������Ƶ��ģ�������ص����Ķ�̬���ܡ����������еĵ��ģ����������PI��������Ϊ�����ջ����ٿ��������Ҷ�ֻģ����������������µ�����ӵ������ԣ� ��δ�о�����������ϵ��µ���ͻ���ĸ������ܡ�������������ģ��Ԥ��(FSMP)��Ϊһ�ֵ����ջ��Ż����Ʒ������ܹ�ע[11-15]��ͨ����������������ɢʱ��ģ��Ԥ����1�����ڵĵ�����Ӧ����չ��������������Ч��ߵ����Ķ�̬���ܡ������������FSMP�ĵ��ģ�������ϵ������ٷ����������źŵ����ķ�ʽ��������ע�������ɸ���ָ���趨�ο������źţ�ͨ��ʹ�õ��ģ�������ص���Ԥ��ģ�ͼ�����1���������ڵĵ���Ԥ��ֵ�����ݵ��ģ�Ͷ��Ӳο������븺�ص�����Ԥ��ֵ�������ۺ�����ѡ����С���ۺ���ֵ��Ӧ�������ڵĿ���״̬���Ƹ���ģ�������ɸ��ص�����ʵ�ָ��ص����Ե��ģ�Ͷ��Ӳο������Ŀ���ȷ���٣����ͨ�����ʵ�����ƽ̨��ʵ����֤������ķ�����
1 ���ģ�������˽ṹ
���ģ�������˽ṹ��ͼ1��ʾ�����ģ������������ģ���������ģ�͡�����ע������Ԥ�������4��ģ�顣����ģ�����ɿ��ؾ������ϸ���������ɣ����ؾ��������������ƽ��Ƶ��������������������ϸ�������Ľ����綯�ƣ���ϸ����������������и��أ�ÿ����1����ϵ���R��1����ϵ��L��ɣ����ڲ������ģ�����ĸ��ص��������ģ�Ͳ�������ʽ�����첽���ģ�ͣ��ڶ˿ڵ�ѹ�����²������ඨ�ӵ���������ע�������ݸ���ָ��������ඨ�ӵ����źź��ض������źţ���������/����״̬�µIJο������źš�Ԥ�������ͨ��Ԥ��ģ�ͺ����ۺ��������������ڿ��ؾ���Ŀ����źš�
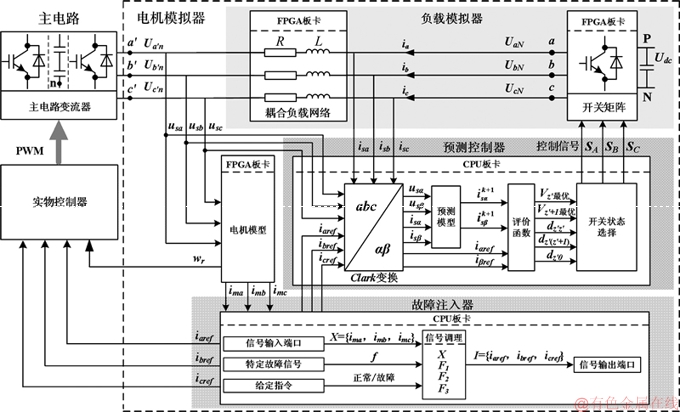
ͼ1 ���ģ�������˽ṹͼ
Fig. 1 Topology diagram of motor simulator
2 ����FSMP�ĵ������ٷ���
2.1 �趨�ο������ź�
ͼ1�У���Ϊ���ģ�����и���ֵ���趨װ�ã�����ע���������ṩ����������������״̬�µĶ��Ӳο������źš�
�����źŵ����ķ�ʽ[16]��������ע����ģ�ͣ�
 (1)
(1)
ʽ�У�XΪ���ģ���ڶ˿ڵ�ѹ�����²��������ඨ�ӵ�����X={ima, imb, imc}��fΪ����ض������źţ�F1, F2��F3�ֱ�Ϊ���ģ�����ඨ�ӵ��������ض����ϵ����������ӡ���˺�ֱȡ������Ĺ��ϳ���������IΪ����ע��������IJο���������X��F1��F2��F3��ѡ������������ʱ���ο������趨ΪI = X�����ٹ��ϵ���ʱ���ο������趨ΪI=F1��F2��F3��
����ת�Ӷ������ϡ������Ѽ��·���ϡ���϶ƫ�Ĺ��ϡ��˻����ѹ��ϡ���й��ϵȳ����������[16]�����ض������ź�f����Ϊ[17]��
f=f(M, f1, s)=A1cos(2��fs1t+��1)+A2cos(2��fs2t+��2) (2)
ʽ�У�MΪ�������س̶ȣ�f1Ϊ���ӵ�������Ƶ�ʣ�sΪ���ת���ʣ�A1��A2Ϊ��Ӧ��Ƶ�����ķ�ֵ������M�ͻ�Ƶ��ֵ�õ���fs1��fs2Ϊ�ض�����������Ӧ��Ƶ�����Ĺ�������Ƶ�ʣ����Ƶf1��ת����s�йأ���1�ͦ�2Ϊ��Ӧ��Ƶ��������λ�ǣ�������ȡֵ��
2.2 ��������Ԥ��ģ��
����ģ�����п��ؾ������ѹ����Ϊ
 (3)
(3)
ʽ�У�UdcΪ���ؾ���ֱ�������ĺ㶨��ѹ��UaN��UbN��UcN�ֱ�Ϊ���ؾ����������A��B��C�������ѹ��SA��SB��SC�ֱ��ʾA��B��Cÿ��صĿ����źţ���0��1��2����״̬����������źſ����z�鿪��״̬[18]��ÿ�鿪��״̬��Ϊ ����=SASBSC=000��100��110��010��011��001��101��111�����У�z=0��1��2������7����z=0��1��2������7ʱ������״̬
����=SASBSC=000��100��110��010��011��001��101��111�����У�z=0��1��2������7����z=0��1��2������7ʱ������״̬ =000��
=000�� =111��Ӧ2�����ѹʸ��v0��v7������6������״̬��Ӧ6����Ч�ĵ�ѹʸ��
=111��Ӧ2�����ѹʸ��v0��v7������6������״̬��Ӧ6����Ч�ĵ�ѹʸ�� (
( =1��2������6)��6����Ч��ѹʸ�������ؾ����1���������ڷֳ�6��������ÿ��������Ӧ�ǶȾ�Ϊ��/3��
=1��2������6)��6����Ч��ѹʸ�������ؾ����1���������ڷֳ�6��������ÿ��������Ӧ�ǶȾ�Ϊ��/3��
����ģ����״̬����Ϊ
 (4)
(4)
ʽ�У� Ϊ����·������x��������ѹ��ixΪ��ϸ�������x�ฺ�ص������±�x=a��b��c���±�
Ϊ����·������x��������ѹ��ixΪ��ϸ�������x�ฺ�ص������±�x=a��b��c���±� ��RΪ��ϸ�������ĵ��裻LΪ��ϸ�������ĵ�С�
��RΪ��ϸ�������ĵ��裻LΪ��ϸ�������ĵ�С�
��ÿ����������Ts�ڣ��� ������ɢ�����õ�abc����ϵ�µ��ģ�������ص�������ɢԤ��ģ�ͣ�
������ɢ�����õ�abc����ϵ�µ��ģ�������ص�������ɢԤ��ģ�ͣ�
 (5)
(5)
ʽ�У�k=1��2��3������ Ϊ���ؾ����ѹ��������ѹ��kʱ�̵IJ���ֵ��
Ϊ���ؾ����ѹ��������ѹ��kʱ�̵IJ���ֵ�� Ϊabc����ϵ�µ��ģ�Ͷ˿ڵ�ѹusx��kʱ�̵IJ���ֵ��
Ϊabc����ϵ�µ��ģ�Ͷ˿ڵ�ѹusx��kʱ�̵IJ���ֵ�� ��
�� Ϊ���ģ�������ص���ix��kʱ�̵IJ���ֵ��
Ϊ���ģ�������ص���ix��kʱ�̵IJ���ֵ�� Ϊ���ģ�������ص���ix��k+1ʱ�̵�Ԥ��ֵ��
Ϊ���ģ�������ص���ix��k+1ʱ�̵�Ԥ��ֵ��
��ʽ(3)����Clark�任���õ���������ϵ�µ��ģ�������ص�����Ԥ��ģ�ͣ�
 (6)
(6)
ʽ�У� Ϊ�ڦ�������ϵ�µ�ֵ��
Ϊ�ڦ�������ϵ�µ�ֵ�� Ϊ�ڦ�������ϵ�µ�ֵ��
Ϊ�ڦ�������ϵ�µ�ֵ�� Ϊ�ڦ�������ϵ�µ�ֵ��
Ϊ�ڦ�������ϵ�µ�ֵ�� Ϊ�ڦ�������ϵ�µ�ֵ��
Ϊ�ڦ�������ϵ�µ�ֵ��
2.3 �������ۺ���
�����������ϵ�£����ģ�������ص���Ԥ��ֵ����ģ�Ͷ��ӵ����ο�ֵ֮��ľ���ֵƽ����Ϊ�в��e��
 (7)
(7)
ʽ�У�i��ref��i��ref��ʾ�ο������ź�iaref��ibref��icref�ڦ�������ϵ�µ�ֵ��
���ؾ����ѹʸ��vz��Ӧ�IJв��ezΪ
ez=ez��+ez�� (8)
ʽ�У�ez����ez���ֱ�Ϊ���ؾ����ѹʸ��vz�ڦ�������ϵ�¶�Ӧ�IJв���У�z=0��1��2������7��
���㵱ǰʱ��kʱ��������2��������Ч��ѹʸ�� ��
�� (+1=MOD(��6)+1)�����ѹʸ��v0��v7������ʱ�䣬����=1��2������6��������������Ӧ����������
(+1=MOD(��6)+1)�����ѹʸ��v0��v7������ʱ�䣬����=1��2������6��������������Ӧ���������� �����������飺
�����������飺
 (9)
(9)
ʽ�У�e0Ϊ���ѹʸ��v0��v7��Ӧ�IJв ��
�� �ֱ�Ϊ��Ч��ѹʸ������Ӧ�IJв
�ֱ�Ϊ��Ч��ѹʸ������Ӧ�IJв Ϊ���������ѹʸ��v0��v7��Ӧ����ʱ�䣻
Ϊ���������ѹʸ��v0��v7��Ӧ����ʱ�䣻 ��
�� �ֱ�Ϊ��������Ч��ѹʸ������Ӧ����ʱ�䡣
�ֱ�Ϊ��������Ч��ѹʸ������Ӧ����ʱ�䡣
������������Ӧ�����ۺ��� ��
��
 (10)
(10)
��������������Ӧ�����ۺ���ֵ��ѡȡ��С���ۺ���ֵ��Ӧ�������ڵĿ���״̬��Ϊ���ؾ�����һʱ�̵Ŀ���״̬��
 (11)
(11)
��С���ۺ���ֵJ��Ӧ�������ڵĿ���״̬�����ڿ��ؾ���ľ��忪�ط�ʽ��ͼ2��ʾ��
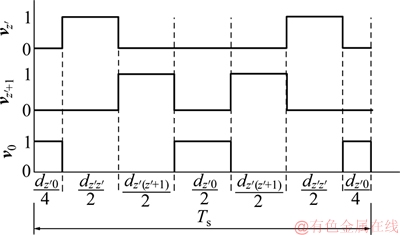
ͼ2 ���ģ�������ط�ʽͼ
Fig. 2 Switch mode diagram of motor simulator
3 ���ģ��������ԭ��
ͼ3��ʾΪ����FSMP���Ƶĵ��ģ��������ԭ����ͼ�в������ص�����ΪTs�����ݸ���ָ��ɹ���ע����ͨ���������ģ�����ඨ�ӵ���imx(x=a, b, c)���ض������ź�f���趨����/���ϲο������ź�ixref(x=a, b, c)����Ԥ��ģ��ͨ������kʱ�̸��ص����Ͷ˿ڵ�ѹ ������k+1ʱ�̸��ص�����Ԥ��ֵ�����ݲο������ź��븺�ص���Ԥ��ֵ���ƫ�����FSMP�����㷨���Ը���ģ����������Ӧ�Ŀ����ź�SX(X=A, B, C)��ʹ�ø���ģ�����ĸ��ص����ܿ���ȷ�ظ������趨������/���ϲο������źš�
������k+1ʱ�̸��ص�����Ԥ��ֵ�����ݲο������ź��븺�ص���Ԥ��ֵ���ƫ�����FSMP�����㷨���Ը���ģ����������Ӧ�Ŀ����ź�SX(X=A, B, C)��ʹ�ø���ģ�����ĸ��ص����ܿ���ȷ�ظ������趨������/���ϲο������źš�
4 ʵ�鼰���
Ϊ��֤������������ĸ������ܣ������dSPACE�İ�ʵ�����ƽ̨����ƽ̨��ʵ���������ʵʱ����������λ��3�����ֹ��ɡ�ʵ����������þ��и��ٴ����������ḻ�ӿ���Դ��TMS320F28335����оƬ���ɼ������ź����Խ��п��Ʋ��Խ��㣬����PWM�����źţ�ʵ������·��������ʵʱ���ơ�ʵʱ����������DS1007CPU�忨��DS5203FPGA�忨��DS1007CPU�忨����Ԥ�����������ע������ʵʱ���㣬DS5203FPGA�忨���ڵ��ģ�ͺ���ģ����ģ�͵�ʵʱ����, ����ʵ�����������ʵʱ�źŽ�������λ��ͨ��ʵʱ����������ģ�Ͳɼ�ʵʱ���ݣ���ʵʱ��ع۲������״̬��
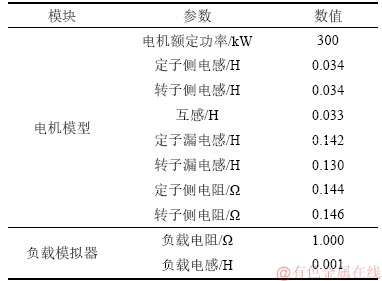
��ʵ�����MT205�������첽�����ϵͳʵ������������1��ʾ��Ϊ��С����ģ��������г������Ҫ������ϵ�У����ǹ���ĵ���ֻᵼ��ϵͳ��̬�����½���Ϊ��֤ϵͳ��̬�������ã�����ģ�������ص��Ӧ���������ģ��©�С�
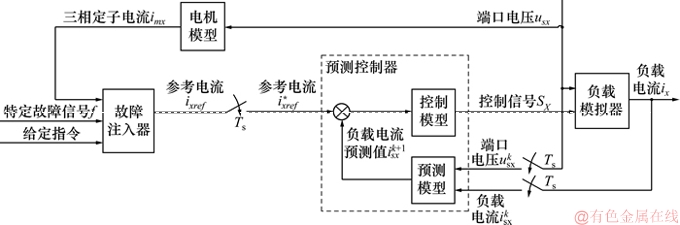
ͼ3 ���ģ��������ԭ����ͼ
Fig. 3 Operation principle block diagram of motor simulator
��1 ���ģ�������ϵ�������ϵͳʵ�����
Table 1 Experimental parameter of fault current tracking system for motor simulator
���ķֱ���û���PI���ںͻ���FSMP���Ƶĵ��ģ�����������ٷ��������ٵ���������ϵ������ȽϷ���2�ַ�����Ч����
�ڵ����������״̬�£��ȽϷֱ����PI���ں�FSMP����ʱ�����ģ�������ص����Ե��ģ�Ͷ��Ӳο������ĸ���Ч��������PI���ں�FSMP����ʱA��������ٵķ�������ͼ4��ʾ����FSMP�����£����ص���i(FSMP)���Կ��ٵظ���ο�����iref�ı仯��Ȼ������PI�����£����ص���i(PI)�Բο������ĸ�������ͺ�
����PI����ʱ����������ٵķ�������ͼ5(a) ��ʾ����ͼ5(a)�ɼ���������ֵƫ��r(PI)ԼΪ10 A�����پ���(ʵ�ʵ���i(PI)��ֵ/�ο�����iref��ֵ)Ϊ90.57%������FSMP��������������ٵķ�������ͼ5(b)��ʾ����ͼ5(b)�ɼ���������ֵƫ��r(FSMP)ԼΪ5 A���������پ���(���ص���i(FSMP)��ֵ/�ο�����iref��ֵ)Ϊ95.28%����˵����PI������ȣ�����FSMP����ʱ�ĵ�����̬��Ӧ�ٶȸ��죬���پ��ȸ��ߡ�
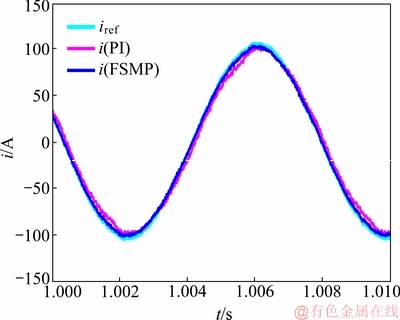
ͼ4 �����������״̬�£����ģ����A�ฺ�ص������ٽ������ͼ
Fig. 4 Waveform diagram of tracking A phase load current of motor simulator under normal running state
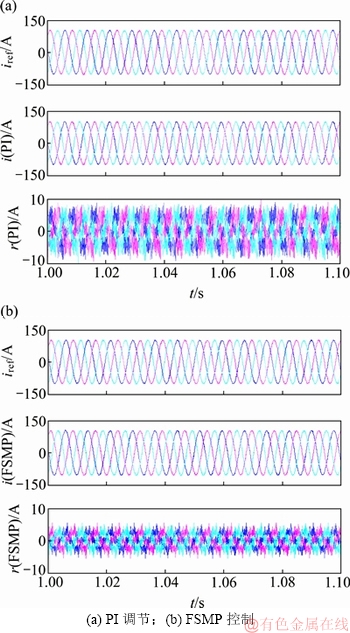
ͼ5 �����������״̬�£����ģ�������ฺ�ص������ٽ������ͼ
Fig. 5 Waveform diagram of tracking three-phase current of motor simulator under normal running state
�ڵ��ת�Ӷ�������״̬�£��ȽϷֱ����PI���ں�FSMP����ʱ�����ģ�������ص����Ե��ģ�Ͷ��Ӳο������ĸ���Ч�������ù��ϳ̶�M=0.2������Ƶ��f1=131.118 Hz��ת����s=0.038������PI���ں�FSMP����ʱA��������ٵķ�������ͼ6��ʾ����FSMP�����£����ص���i(FSMP)���Կ��ٵظ���ο�����iref�ı仯��Ȼ����PI�����£����ص���iref�Բο������ĸ�������ͺ�
����PI����ʱ����������ٵķ�������ͼ7(a) ��ʾ����ͼ7(a)�ɼ���������ֵƫ��r(PI)ԼΪ12 A�����پ���(���ص���i(PI)/�ο�����iref��ֵ)Ϊ88.68%������FSMP����ʱ����������ٵķ�������ͼ7(b)��ʾ����ͼ7(b)�ɼ���������ֵƫ��r(FSMP)ԼΪ6A���������پ���(���ص���i(FSMP)/�ο�����iref��ֵ)Ϊ94.34%����˵���ڵ������״̬�£���PI������ȣ�����FSMP����ʱ�����ĸ�����Ȼ���ָ���ض�̬��Ӧ���ߵظ��پ��ȡ�
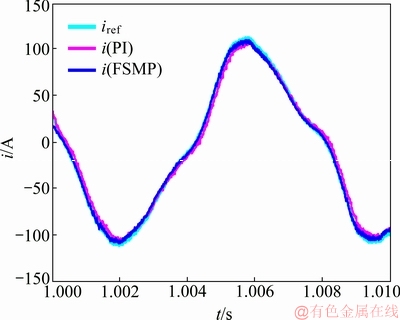
ͼ6 ���ת�Ӷ�������״̬�£����ģ����A��������ٲ���ͼ
Fig. 6 Waveform diagram of tracking A phase load current of motor simulator in condition of broken bar fault
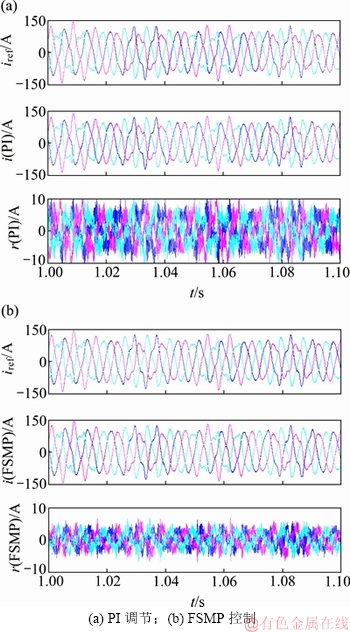
ͼ7 ���ת�Ӷ�������״̬�£����ģ��������������ٽ������ͼ
Fig. 7 Waveform diagram of tracking three-phase current of motor simulator in condition of broken bar fault
���ת�Ӷ�������״̬�£����ģ����A�����Ƶ�����ͼ8��ʾ����ͼ8�ɼ�����Ƶ����������fs=(1��2s)f1��Ӧ�Ĺ��ϱ�Ƶ���������϶����������۷���[19]��A�ฺ�ص�����A��ο�����Ƶ�ʷֲ�״̬����һ�£����ߵĹ��ϱ�Ƶ������ͬ���Ӷ���֤�ڵ��ת�Ӷ�������״̬�£����ģ������Ȼ������ʵ��ȷ��ģ����ģ�Ͷ��ӵ����Ĺ���״̬��
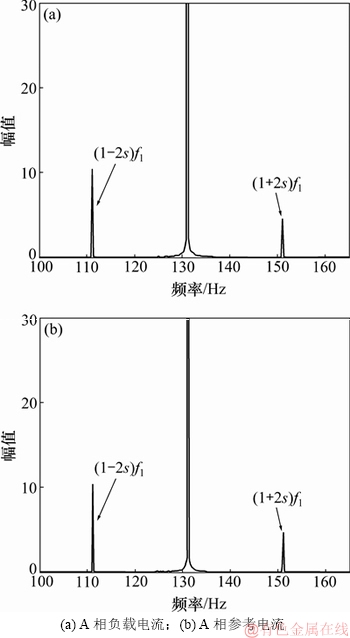
ͼ8 ���ת�Ӷ�������״̬�£����ģ����A�����Ƶ����ͼ
Fig. 8 Spectrum analysis diagram of A phase current of motor simulator in condition of broken bar fault of motor rotor
5 ����
1) ���ڵ��ģ�������Ե�ЧΪʵ�ʵ�������һ�ֻ���FSMP�ĵ��ģ�������ϵ������ٷ�����
2) ��������Ĺ��ϱ��ּ����ԣ������źŵ����ķ�ʽ��������ע���������ݸ���ָ���ó����������״̬�µIJο������źš�
3) ���ʵ�����ƽ̨���Ƚ�����������״̬�µ��ģ�������ص����Ե��ģ�Ͷ��ӵ����ĸ���Ч�����봫ͳPI������ȣ��������᷽����̬��Ӧ�ٶȸ��죬���پ��ȸ��ߡ�
�ο����ף�
[1] GU B G, SUNG P J, KONG T S, et al. Off-line inter-turn fault diagnosis method for induction motors by impedance analysis[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5913-5920.
[2] ������, л����, ������, ��.����RVMD��ǣ�����ת�ӳ��ڶ������ϼ��[J].���������, 2018, 33(3): 497-502.
YIN Jintian, XIE Yongfang, YANG Chunhua, et al. Monitoring of incipient rotor bars broken fault in traction motors based on RVMD method[J].Control and Decision, 2018, 33(3): 497-502.
[3] XIE Ying, CHEN Peng, LI Fei, et al. Electromagnetic forces signature and vibration characteristic for diagnosis broken bars in squirrel cage induction motors[J]. Mechanical Systems and Signal Processing, 2019, 123: 554-572.
[4] ������, ��ҫ��, ��ƽ, ��. ��������˿����Ե����ֻ�ʵ�ַ���[J]. �繤����ѧ��, 2015, 30(14): 184-192.
SONG Pengxian, LI Yaohua, WANG Ping, et al. The digital realization method of AC motor simulator[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 184-192.
[5] PONS-LLINARES J, ANTONINO-DAVIU J A, RIERA-GUASP M, et al. Advanced induction motor rotor fault diagnosis via continuous and discrete time�Cfrequency tools[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3):1791-1802.
[6] SLATER H J, ATKINSON D J, JACK A G. Real-time emulation for power equipment development. Part 2: the virtual machine [J]. IEE Proceedings-Electric Power Applications, 1998, 145(3): 153-158.
[7] RAO Y S, CHANDORKAR M. Rapid prototyping tool for electrical load emulation using power electronic converters[C]// Industrial Electronics & Applications, Kuala Lumpur Malaysia IEEE, 2009: 106-111.
[8] JACK A G, ATKINSON D J, SLATER H J. Real-time emulation for power equipment development. Part 1: real-time simulation[J]. IEE Proceedings-Electric Power Applications, 1998, 145(2): 92-97.
[9] RAO Y S, CHANDORKAR M C. Real-time electrical load emulator using optimal feedback control technique[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1217-1225.
[10] GRUBIC S, AMLANG B, SCHUMACHER W, et al. A high-performance electronic hardware-in-the-loop drive�Cload simulation using a linear inverter (LinVerter)[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1208-1216.
[11] KUMAR K V P, KUMAR T V. Predictive torque control of open-end winding induction motor drive fed with multilevel inversion using two two-level inverters[J]. IET Electric Power Applications, 2018, 12(1): 54-62.
[12] ����ǿ, ���, ������, ��. ʱ��ϵͳ���Կ��Ź���Ԥ����Ƶ����ܷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2018, 49(8): 1960-1970.
CHEN Zengqiang, WU Xia, SUN Mingwei, et al. Performance analysis of active disturbance rejection generalized predictive control on time-delay systems[J]. Journal of Central South University(Science and Technology), 2018, 49(8): 1960-1970.
[13] DAN Hanbing, ZHU Qi, PENG Tao, et al. Preselection algorithm based on predictive control for direct matrix converter [J]. IET Electric Power Applications, 2017, 11(5): 768-775.
[14] ELSISI M, SOLIMAN M, ABOELELA M A S, et al. Model predictive control of plug-in hybrid electric vehicles for frequency regulation in a smart grid[J]. IET Generation Transmission & Distribution, 2017, 11(16): 3974-3983.
[15] ����ʤ, ��ε, ����, ��. ���༶��H����������ģ��Ԥ���������[J]. �й��������ѧ��, 2019, 39(4): 1127-1138.
SONG Wensheng, JIANG Wei, LIU Bi, et al. Single-phase cascaded H-bridge rectifiers simplified model predictive current control[J]. Proceedings of the CSEE, 2019, 39(4): 1127-1138.
[16] ֣����, ��Ʒ��. ����������Ӿ�Ե�������������⼼������[J]. �й��������ѧ��, 2019, 39(2): 395-406.
ZHENG Dayong, ZHANG Pinjia. A review of fault diagnosis and online condition monitoring of stator insulation in AC electrical machine[J]. Proceedings of the CSEE, 2019, 39(2):395-406.
[17] YANG Chunhua, YANG Chao, PENG Tao, et al. A fault- injection strategy for traction drive control systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(7): 5719-5727.
[18] BHATTACHARYA S, SHARMA S K, MASCARELLA D, et al. Sub-fundamental cycle switching frequency variation for switching losses reduction of a two-level inverter traction drive[J]. IEEE Transactions on Transportation Electrification, 2017, 3(3): 646-655.
[19] SIZOV G Y, SAYED-AHMED A, YEH C C, et al. Analysis and diagnostics of adjacent and nonadjacent broken rotor-bar faults in squirrel-cage induction machines[J]. IEEE Transactions on Industrial Electronics, 2009, 56(11): 4627-4641.
(�༭ ������)
�ո����ڣ�2018-08-20�������ڣ�2018-10-23
������Ŀ(Foundation item)��������Ȼ��ѧ�����ش���Ŀ(61490702); ������Ȼ��ѧ����������Ŀ(61773407); ���ϴ�ѧ�����ͨ���ܿ����밲ȫ������ʡ�ص�ʵ����������Ŀ(2017TP1002); ���������ϻ�����Ŀ(6141A02022110); ���ϴ�ѧ�����У��������ҵ���ר���ʽ�������Ŀ(2017zzts469) (Project(61490702) supported by the Major Program of the National Natural Science Foundation of China; Project(61773407) supported by the General Program of the National Natural Science Foundation of China; Project(2017TP1002) supported by the Hunan Provincial Key Laboratory of Energy Saving Control and Safety Monitoring for Rail Transportation; Project(6141A02022110) supported by the Program of the Joint Foundation of the Chinese Ministry of Education; Project(2017zzts469) supported by the Fundamental Research of Funds for the central Universities of Central South University)
ͨ�����ߣ������ʿ�о��������¸���ϵͳ���豸�Ĺ�������о���E-mail: chaoyang@csu.edu.cn

