用于井下移动设备定位的路标设计及其视频识别方法
孟宇1,刘立1,李文辉2
(1. 北京科技大学 机械工程学院,北京,100083;
2. 吉林大学 计算机科学与技术学院,吉林 长春,130021 )
摘要:提出采用机器视觉识别技术对井下移动设备进行定位,设计一种带有显著视觉特征并能够携带地理位置信息的条形码路标,并提出一种快速的条码识别方法在井下移动设备上对路标图像加以识别。试验结果表明:该识别方法具有很好的实时性和精确性,为井下移动设备的视觉定位打下良好基础。
关键词:无人采矿;机器视觉;条形码;交叉25码
中图分类号:TP29 文献标志码:A 文章编号:1672-7207(2011)S1-0770-03
Designation and recognition method of landmarks for positioning underground mobile equipments
MENG Yu1, LIU Li1, LI Wen-hui2
(1. School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China;
2. College of Computer Science and Technology, Jilin University, Changchun 130012, China)
Abstract: Applying machine vision technique to positioning underground mobile equipments is proposed. Barcode landmarks with obvious visual feature and geographic information are designed and a fast method for recognizing them is suggested. Experiments prove that the method can recognize these landmarks in real-time with a high accuracy and has laid the foundation for positioning underground mobile equipments by machine vision technique.
Key words: unmanned mining; machine vision; barcode; interleaved 2 of 5 barcode
井下无人采矿是化解采矿业高危风险的一条途径。对于工作在狭窄巷道中的无人采矿设备,只有实时精准的定位和导航技术才能避免它们在快速行驶过程中互相碰撞或与井下墙壁发生碰撞,保证它们在巷道中沿着正确的轨迹行进,从而保障井下无人采矿工作能够有条不紊地进行。目前,国内外研究的井下定位技术主要有红外(IR,Infrared Ray)技术[1]、射频识别(RFID,Radio frequency identification)技术[2-3]、透地通信技术[4]、漏泄通信技术[5]及无线局域网WLAN (Wireless local area network)技术[6]。然而,独立使用其中任一种技术,或因需人工参与、或因无法做到对井下移动设备的实时精确定位,均无法适用于无人采矿。我们提出一种基于机器视觉定位的技术,其思路是:若能保证巷道中的移动设备通过摄像机在任意时刻都能观测到几个在已知地理位置摆放好的路标,即可通过视频分析方法对路标加以识别,获得路标的地理位置信息;然后,采用视觉测距方法准确地计算设备与路标之间的距离;最后,根据路标位置及设备与路标之间的距离即可计算出设备的定位数据。基于机器视觉的井下移动设备定位技术,不需人工参与,只要路标的视频识别方法和测距方法能够实时、精 确,即可实现对井下移动设备的实时精确定位。对路标及其识别方法的设计是基于机器视觉井下移动设备精确定位技术的第一步,只有识别出预先设定的路标、获取路标的地理信息,方可根据设备与路标的方位关系推算设备所处的地理位置。
1 路标表面图像编码规则的设计
为便于视频识别并且能够携带地理信息,用于井下移动设备定位的路标须具有明显视觉特征并能够表示特定数据。为此,本文作者提出以条形码来制作路标的表面图像。
1.1 条形码
条形码(简称条码)技术是在计算机技术和信息技术基础上发展起来的一门集编码、印刷、识别、数据采集于一体的新兴技术。条形码作为一种信息代码,可以用特殊的图形来表示数字、字母信息和某些符号。它由一组宽度、反射率相同的条和空按照一定的编码规则组合起来,用以表示一个完整数据的符号。交叉分布的条和空具有非常明显的视觉特征,同时又能够表示数据。因此,条形码适用于制作巷道中的路标表面图像。
1.2 条形码路标的设计
用机器视觉方法对地下移动设备进行定位,要求设备上的摄像机必须采集到路标的完整图像方能加以识别,而条形码路标中的条与空的宽度又不宜过小以致无法分辨。因此,需采用一种密度较高的编码方法来定义路标的编码规则。
交叉25码是一种只能表示数字的编码方法,其编码长度可随编码数据的位数而变化。之所以称这种编码方法为交叉25码,是因为它分别以连续的5个条和连续的5个空来表示奇位和偶位的数字,而组成奇位数字和偶位数字的条与空相互交叉。在连续的5个条或空之中,有且仅有2个宽的条或空。整个数据的编码由头部静区、头部信息(窄条-窄空-窄条-窄空),数字编码,尾部信息(宽条-窄空-窄条)及尾部静区组成。交叉25码的数字编码规则如表1所示[7]。
表1 交叉25码编码规则 (N 表示窄条/空, W 表示宽条/空)
Table 1 Coding rules of interleaved 2 of 5 code

交叉25码因其所有的条与空都表示代码,是目前所有一维条形码中密度最高的编码方法。于是,我们选择此方法定义路标的编码规则。依此方法制作的条形码路标如图1所示,
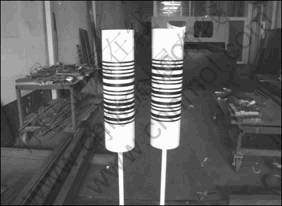
图1 采用交叉25码编码的条形码路标
Fig.1 Barcode landmark coded by interleaved 2 of 5 code
2 路标图像的识别方法
识别图像中的条形码时,找到正确的扫描方向是实现识别的关键。对图像沿360°全方向扫描是找到正确扫描方向最可靠的方法,但这种方法计算量太大。有学者提出根据矩不变原理[8]可将条形码图像转正,但我们在实验中使用这种方法仅能将背景简单的条码图像转正,而且这种方法的计算量也相对较大。
我们根据条形码路标的摆放方式,设计了一种近似全方向扫描方法的条形码图像识别算法,其过程如下:
步骤1 采用膨胀、腐蚀和平滑等方法对原始图像I进行图像预处理以去除图像中的噪点,得到图像I′,然后将I′二值化得到图像I″;
步骤2 定义垂直于图像I″的直线束L={li}(i=1,…,n),其中,l1经过I″的左侧边界线,相邻两条直线li与li+1之间的距离为10像素,ln到I″右侧边界线的距离小于10像素,令旋转角度θ=0;
步骤3 将直线束L分别沿+θ和-θ方向旋转,被图像I″截断后分别得到顺时针扫描线段束LS={lSi}和逆时针扫描线段束LN={LNi}(i=1,…,n),令j=1;
步骤4 根据交叉25码头部信息和尾部信息的定义,判断图像I″在扫描线段lsj上是否含有头部或尾部信息,如lsj上不含头部和尾部信息则转步骤5;如果含有,则按交叉25码对数字的定义进行正向或反向识读,识读完毕后再校验其后的尾部或头部信息,校验成功则返回识别结果并退出算法。若在识读数字过程中无法读出数字以及识读数字后校验尾部或头部失败,则继续寻找扫描线段上的下一个头部或尾部信息,直到扫描至线段末端为止;
步骤5 根据交叉25码头部信息和尾部信息的定义,判断图像I″在扫描线段lNj上是否含有头部或尾部信息,如lNj上不含头部和尾部信息则转步骤6;如果含有,则按交叉25码对数字的定义进行正向或反向识读,识读完毕后再校验其后的尾部或头部信息,校验成功则返回识别结果并退出算法。若在识读数字过程中无法读出数字以及识读数字后校验尾部或头部失败,则继续寻找扫描线段上的下一个头部或尾部信息,直到扫描至线段末端为止;
步骤6 j=j+1,若j≤n,转步骤4;
步骤7 θ=θ+5°,若θ≤90°转步骤3;否则,判定图像I″中无条形码存在,退出算法。
考虑到条形码路标垂直于地面放置,在图像中对条形码的正确识读方向多数情况下与垂直方向相近,因此算法设定扫描线角度从垂直方向开始,并分别沿顺、逆时针方向逐渐旋转。
3 实验结果
我们将条码路标置于模拟巷道中,以模拟样车为移动设备,将高速摄像机和嵌入式单板计算机安装在样车上,以本文提出的算法对路标加以识别,识别结果如表2所列。
表2 路标识别算法的识别结果
Table 2 Recognition results of barcode recognition algorithm

经过反复试验,路标识别算法对路标的识别正确率可达98.6%。在实验过程中,对于存在条码的图像,该算法运行于嵌入式单板计算机上平均可在0.1 s左右识别出条码信息;对于不存在条码的图像则需0.3 s左右给出无条码信息的结果。因此,该算法能够满足对路标识别的实时性要求。
4 结论
用机器视觉方法为井下移动设备定位,需要在巷道中摆放具有明显视觉特征且能够携带地理信息的路标。本文提出采用条形码设计路标的表面图像,并提出一种快速的条码路标识别方法。该方法具有较小的计算量和较高的识别精度,在很短的时间内即可正确完成对路标图像的识别与判定,符合井下移动设备定位对路标识别的实时性要求。
参考文献:
[1] Luke R A. Diamonds with dispatch: Computerized LHD dispatching at DeBeers Finsch―A progress report[J]. World Mining Equipment, 1992(6): 24-28.
[2] 黄强, 鲁远祥, 孙中闰, 等. KJ90矿井人员跟踪定位及考勤管理系统的研制[J]. 矿业安全与环保, 2004, 31(5):13-16.
HUANG Qiang, LUYuan-xiang, SUN Zhong-run. Development of KJ90 following location and attendance management system for underground personnel[J]. Mining Safety & Environmental Protection, 2004, 31(5): 13-16.
[3] 唐波, 徐廷生, 罗明凤, 等. 一种基于nRF403井下人员射频识别管理系统[J]. 现代电子技术, 2006, 29(7): 10-12.
TANG Bo, XU Ting-sheng, LUO Ming-feng, et al. Radio frequency identification management system for personnel in the well based on nRF403[J]. Modern Electronics Technique, 2006, 29(7): 10-12.
[4] 李建英. PED系统在煤矿的应用[J]. 矿业快报, 2004, 3(10): 94-95.
LI Jian-ying. Application of PED system in coal mines[J]. Express Information of Mining Industry, 2004, 3(10): 94-95.
[5] Outalha S, Le R, Tardif R M. Toward the unified and digital communication system for underground mines[J]. CIM Bulletin, 2000, 93(1044): 100-105.
[6] 李晶. 井下巷道超高频无线电波传播及定位算法的研究[D]. 天津: 天津大学, 2006.
LI Jing. Research on the UHF radio wave propagation and location algorithms in mine tunnels[D]. Tianjin: Tianjin University, 2006.
[7] All about interleaved 2 of 5 barcode[OB/OL]. [2011-01-10]. http://www.adams1.com/i25code.html.
[8] 范永法, 何红庄. 一维及二维条码图像识别系统研究[J]. 仪器仪表学报, 2003, 24(z2): 488-489.
FAN Yong-fa, HE Hong-zhuang. Study of recognition system for 1-D and 2-D bar code image[J]. Chinese Journal of Scientific Instrument, 2003, 24(z2): 488-489.
(编辑 杨华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(50904007)
通信作者:孟宇(1981-),男,河北定县人,博士,讲师,从事汽车电子及自动化研究;E-mail:myu_jlu@126.com

