海洋采矿扬矿软管单元耦合建模方法与形态分析
王刚1,刘少军1,李锋2
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 长沙矿冶研究院有限责任公司 深海矿产资源开发利用技术国家重点实验室,湖南 长沙,410012)
摘要:针对深海采矿柔性复合软管抗拉刚度大、抗弯刚度小的宏观特性,提出基于空间管梁有限元模型的单元耦合建模方法,建立包括扬矿硬管、柔性软管、中间仓及扬矿泵等多体组合的整体扬矿管线系统有限元模型,为扬矿管线系统的计算分析提供了一种较精确的力学分析模型。运用该模型开展了海洋采矿柔性软管的水下空间形态分析,获得了重要的系统特性和设计参数。
关键词:深海采矿;柔性复合软管;扬矿管线;形态分析;有限元法
中图分类号:TD857 文献标志码:A 文章编号:1672-7207(2011)S2-0234-07
Modeling methods of element-coupling and shape analysis on lift hose of deep-ocean mining
WANG Gang1, LIU Shao-jun1, LI Feng2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. State Key Laboratory of Exploitation and Utilization of Deep-Sea Mineral Resource,
Changsha Research Institute of Mining and Metallurgy Co. Ltd., Changsha 410012, China)
Abstract: Modeling methods of coupling element were put forward based on space beam model of finite element model to simulate the macrostructure characteristic of flexible hose, which tensile rigidity was large and bending stiffness was small relatively. The integral system model of multibody pipeline system was established, which consisted of lifting steel pipe, flexible hose, buffer station, pump, etc. A kind of mechanics model was achieved for the analysis on the integral lifting pipeline. Shape analysis on lift hose in deep ocean mining was carried out based on the coupling element model, the important characteristics and parameters were obtained.
Key words: deep-sea mining; flexible composite hose; lift pipeline; shape analysis; finite element method
管道提升式海洋采矿系统是目前被国际广泛认可的典型深海多金属结核开采系统。自20世纪70 年代以来,国际上各研究机构对这种采矿系统开展了大量的研究与海洋试验。采用集矿机与管道提升相结合的采矿方式,其扬矿系统是由扬矿硬管、扬矿泵、中间仓、柔性软管等多体组合的复杂长管线系统[1-4]。在海洋采矿作业过程中,扬矿管线系统既受到包括海洋环境载荷在内的各种复杂外部载荷作用,又受到海面采矿船和海底集矿机作业运动的影响,因此,其运动学和动力学特性复杂。柔性复合软管作为扬矿管线系统的重要组成部分,它的建模方法对整体扬矿系统作业分析的计算效率和精度影响很大,所以,研究准确高效的软管建模方法是进行扬矿管线力学分析的前提条件。国内外有许多学者对深海多金属结核开采的扬矿硬管的管线系统进行了水下作业过程中运动学和动力学特性的数值仿真研究[5-11],但对软管进行建模与分析较少,采用的建模方法亦不同[12-14]。对于类似软管这种多层材料复合管,可以采用复合材料的有限元建模技术对其结构单独进行研究,但该方法难以从宏观的角度开展基于整体管线的运动学和动力学研究。由于海洋工程中采用的软管的对拉、弯、扭、剪等变形能力不是同一量级的,研究者可以根据软管对各种变形能力的不同来简化计算模型。国内外文献通常采用的建模方法有2种:一种是把软管简化为“索”,只考虑软管的抗拉能力,而忽略其它的抗变形能力;另一种是把软管简化为“梁”,主要考虑软管的抗拉和抗弯能力。对于抗弯能力可以忽略的软管,“索”模型比“梁”模型简单。而对于抗弯能力虽低,但不能忽略的海洋采矿软管,“梁”模型可获得很好的结果[13-14]。为了获得不同量级的软管抗拉刚度和抗弯刚度,需在“梁”模型的总刚度矩阵中分别定义弯曲刚度矩阵和轴向刚度矩阵。在此,本文作者采用基于空间管梁有限元模型的单元耦合建模方法,实现对柔性复合软管建模,为扬矿管线系统的整体联动分析提供了一种较精确的力学分析模型。
1 单元耦合建模方法
作为多层材料复合管的海洋矿物输送软管表现的宏观特性为抗拉刚度很大,而抗弯刚度很小,其结构示意如图1所示。以我国海洋采矿试验扬矿系统设计方案为研究对象,输送软管系统水下空间构形示意图如图2所示。软管空间构形采用集中吊挂浮力配置的马鞍型形态,以利于集矿机的作业运动,其基本设计参数如表1所示。
单元耦合建模方法针对宏观特性分析,忽略其内部复合材料性质,分别定义等效抗拉弹性模量Et和等效抗弯弹性模量E b。以300 m软管建模为例,每米设1个节点,共301个节点,每2个节点间建立重合的2个管单元:一种为“梁”单元模式,一种为“索”单元模式,两单元的节点自由度完全耦合。“梁”单元和“索”单元均假定为各向同性的弹性材料。“梁”单元的单元刚度矩阵为 ,设定其弹性模量EP取软管的等效抗弯弹性模量Eb。
,设定其弹性模量EP取软管的等效抗弯弹性模量Eb。
图1 输送软管的材料结构示意图
Fig.1 Structure of flexible composite hose

图2 试验软管在海底下的空间构形设计
Fig.2 Space configuration of hose on seabed
表1 某试验系统软管主要设计参数
Table 1 Design parameters of flexible composite hose of trial system

“索”单元的弹性模量Ec取软管的等效抗拉弹性模量Et与等效抗弯弹性模量Eb的差值,即 。
。
“索”单元的两端为铰接情况,两端都是铰接的空间管单元经凝聚和扩充处理以后,其单元刚度矩阵仍保持12×12阶矩阵,即 。
。
由于两单元的节点自由度完全耦合,因此,将“梁”单元刚度矩阵 与“索”单元刚度矩阵
与“索”单元刚度矩阵 叠加,可得两节点间的等效刚度矩阵。
叠加,可得两节点间的等效刚度矩阵。


由上述推导可知,单元耦合模型中的“索”单元增强了模型的抗拉刚度,而模型的抗拉刚度和扭转刚度仍由“梁”单元提供。
2 建模方法的验证算例
由材料力学中梁的弯曲变形计算,可得悬臂梁端部受集中弯矩下的变形,当端部的集中弯矩达到 时,悬臂梁正好弯成1个圆。
时,悬臂梁正好弯成1个圆。
设悬臂梁的截面为圆,直径d=0.01 m,长度l=1.2 m,材料弹性模量E=210 GPa,泊松比μ=0.28,材料密度ρ=7 800 kg/m3。为了考察单元耦合建模的正确性,在ANSYS软件中采用不同方法建立2个对比计算模型,均采用几何非线性静态分析。
(1) 模型1:由单一梁单元构成的梁模型。
有限元模型中的梁单元长度le=0.01 m,共120个单元,截面和材料性质与设定值一致。
载荷计算1:梁在重力作用下的变形如图3中模型一计算值所示。
载荷计算2:在梁的自由端,逐步施加集中弯矩M(0~ ),计算过程不计重力效应,梁的变形过程如图4所示。
),计算过程不计重力效应,梁的变形过程如图4所示。
载荷计算3:在梁自由端,沿轴向施加10 kN集中拉力,梁的沿轴向拉长0.727 6 mm。
(2) 模型2:由梁单元和索单元构成的单元耦合梁模型。
单元耦合模型中的梁单元长度le=0.01 m,共120个单元,单元截面与设定值一致,材料弹性模量E=210 GPa,泊松比μ=0.28,材料密度ρ=3 900 kg/m3。单元耦合模型中的索单元共120个单元,索单元在几何外形和材料特性上与梁单元的完全一致,并与梁单元共用相同节点。因此,模型中的单元总数为240个,节点总数为121个。
载荷计算1:单元耦合梁模型在重力作用下的变形如图3中模型2计算值所示。
载荷计算2:在单元耦合梁模型的自由端,逐步施加集中弯矩M(0~),计算过程不计重力效应,耦合梁的变形过程如图4所示。
载荷计算3:在单元耦合梁模型自由端,沿轴向施加10 kN集中拉力,梁模型的沿轴向拉长0.363 8 mm。
通过对2个模型计算结果进行对比分析可知:
(1) 如图1和图2所示,模型1与模型2在相同弯矩载荷作用下的弯曲变形一致,即耦合梁模型与单一梁模型的抗弯刚度相同,因此,耦合梁模型中的索单元没有改变模型中节点间的抗弯刚度。

图3 不同模型受重力作用的变形计算
Fig.3 Calculation of beam deformation by gravity
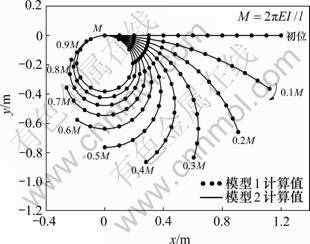
图4 端部受弯矩的模型变形计算
Fig.4 Calculation of beam deformation by moment
(2) 由载荷计算3的结果可知:耦合梁模型的等效抗拉弹性模量为梁单元和索单元弹性模量的叠加,因此,在相同集中拉力作用下,耦合梁模型的轴向变形为单一梁模型的1/2,即耦合梁模型的抗弯刚度为单一梁模型的2倍。
上述计算实例证明:基于单元耦合的有限元建模方法是软管宏观分析建模的可行方法。
3 海洋采矿软管仿真分析实例
3.1 扬矿管线系统整体模型
采用集矿机与管道提升相结合的采矿方式,其扬矿系统是由扬矿硬管、扬矿泵、中间仓、柔性软管等多体组合的复杂长管线系统(见图5),本文将扬矿管线系统各部分均简化为受各种作用力的管梁,在ANSYS软件中采用PIPE59管单元建模。整个扬矿管线系统的坐标空间定义如下:Z轴为垂直水面方向,沿水深方向为负,X-Y平面为水平面。采矿船与扬矿管的联接处为坐标原点。在整体管线静态分析模型和拖航作业分析模型中,扬矿硬管上端呈十字铰接状态, 即可绕X轴、Y轴旋转,但不能绕Z轴旋转。在布放回收过程分析模型中,采用固接方式。扬矿硬管下端与中间仓的联接亦采用十字铰联接,扬矿软管两端分别与中间仓和集矿机固接。
表2所示为整体扬矿管线模型的单元分配方案:
(1) 软管由“梁”、“索”2种单元耦合构成,其中“梁”单元和“索”单元各300个。重合的索单元与梁单元共用相同节点,软管节点总数为301个。
(2) 在软管以上,中间仓为1个单元,硬管分为156个单元,扬矿泵为1个单元,每单元2个节点。中间仓下端与软管固接,因此,中间仓单元与软管单元联接处为1个节点。硬管下端节点和中间仓单元上节点采用节点自由度约束耦合来模拟十字铰联接。
(3) 整体扬矿管线模型节点总数为460,单元总数为758,其中软管耦合单元600个。
表2 300 m软管模型的单元划分
Table 2 Element distribution of 300 m flexible hose

软管上由集中浮力球产生的集中悬挂浮力作为沿Z轴方向的常力加载在图2中的第1浮体吊挂处F1(距中间仓1/3软管总长度处)和第2浮体吊挂处F2处(距中间仓2/3软管总长度处)。根据软管的结构设计,一种环绕在软管上两处的龙骨架结构用来联接集中浮力球,10 m长龙骨架结构能避免软管应力集中。因此,在有限元模型中,每一处的集中吊挂浮力被分布在10个管单元上。海洋波浪和海流产生的液动力载荷不考虑其周期性变化,只考虑其最大水平分量,作为管道上水平方向的静载荷加载。初步设定软管底部B点(集矿机)的初始目标位置坐标为(x=200, y=0, z= -1 000),因此,在管线初始构形计算过程中,采用线性斜坡方式加载,即在令垂直管线末端B点发生微小水平位移后,分1 000步将管线浮力、集中吊挂浮力、环境载荷等外部载荷比例加载,直到软管底部达到目标位置为止。

图5 ANSYS中整体扬矿管线模型(局部)
Fig.5 Integrated model of lift system in ANSYS
3.2 软管空间构形计算
软管空间构形受软管的材料特性、集矿机作业运动、系统整体拖航运动、海洋液动力等因素影响[15-16],同时,软管的浮力配置方式也是软管构形最主要的影响因素之一。基于本文建立的整体扬矿管线系统模型,开展了集中吊挂浮力配置对软管空间构形影响计算分析。计算结果表明:
(1) 当集中吊挂浮力等于软管重力时,第1浮体吊挂处(L/3处,L为软管总长度)布置浮力为吊挂总浮力的1/3,第2浮体吊挂处(2L/3处)布置浮力为总浮力的2/3,300 m软管可形成较好的管形,如图6和图7中所示的较优构形。
(2) 当集中吊挂浮力等于软管水中重力,而改变集中浮力配置方式(大小配置比例、吊挂位置)时,亦会对软管形态产生影响。当浮力配置比例为:第1浮体吊挂处(L/3处)布置浮力为吊挂总浮力的2/3,第2浮体吊挂处(2L/3处)布置浮力为总浮力的1/3时的 300 m软管构形如图6中实线所示。当集中浮力吊挂位置配置为:第1浮体吊挂处(L/3处)布置浮力为吊挂总浮力的1/3,第2浮体吊挂处(L/2处)布置浮力为总浮力的2/3时的300 m软管构形如图7中实线所示。

图6 吊点浮力分配改变对管形的影响
Fig.6 Effect of concentrated buoyancy on hose shape by distribution

图7 吊点相对位置的改变对管形的影响
Fig.7 Effect of position of concentrated buoyancy on hose shape
4 结论
(1) 根据柔性复合软管抗拉刚度大、抗弯刚度小的宏观特性,提出了基于空间管梁有限元模型的单元耦合建模方法,并通过典型材料力学算例,验证了单元耦合有限元建模方法的有效性。
(2) 基于单元耦合建模方法,建立了整体扬矿管线系统有限元模型,为扬矿软管水下空间构形分析提供了一种较精确的力学分析模型。
(3) 软管集中吊挂浮力的配置方式是对软管水下空间构形主要的影响因素之一,考虑管内矿浆的浓度变化,软管集中吊挂浮力范围应为软管总重力(含管内矿浆)减去自身浮力后所得数值的95%~105%。
参考文献:
[1] Bath A R, Preussag A G. Deep sea mining technology: Recent developments and future projects[C]//Paper No.OTC 5998. Offshore Technology Conference. Houston, Texas, US, 1989: 333-340.
[2] Chung J S. Deep-ocean mining technology: Learning curve I[C]//Proc 5th Ocean Mining Symp, ISOPE. Tsukuba, Japan, 2003: 1-6.
[3] Chung J S. Deep-ocean mining issues and ocean mining working group (OMG)[C]//Proc 3rd Ocean Mining Symp, ISOPE. 1999: 14-17.
[4] LIU Shao-jun, WANG Gang, LI Li. Virtual reality research of ocean poly-metallic nodule mining based on COMRA’s mining system[C]//Proc 5th Ocean Mining Symp, ISOPE. Tsukuba. Japan, 2003: 104-111.
[5] Chung J S, Cheng B. Three-dimensional coupled responses of a vertical deep-ocean pipe: Part I. Excitation at pipe ends and external torsion[J]. International Journal of Offshore and Polar Engineering, 1994, 4(4): 320-330.
[6] Cheng B, Chung J S. Effects of axial dampers and elastic joints on the 3-D dynamic responses of a deep-ocean pipe with torsional coupling[J]. International Journal of Offshore and Polar Engineering, 1997, 7(1): 36-43.
[7] Cheng B, Chung J S. Application of thrusts to elastic joints of long vertical pipe in 3-D nonlinear motion: Part Ⅰ. MSE and FEM modeling[C]//Proceedings of the Seventh International Offshore and Polar Engineering Conference. Honolulu, USA, 1997: 115-121.
[8] Cheng B, Chung J S. Application of thrusts to elastic joints on long vertical pipe in 3-D nonlinear motion: Part Ⅱ. Numerical examples by MSE and FEM results[C]//Proceedings of the Eighth International Offshore and Polar Engineering Conference. Montreal, Canada, 1998: 189-198.
[9] 肖林京. 深海采矿扬矿管运动和动力学特性研究[D]. 北京: 北京科技大学土木与环境工程学院, 2000.
XIAO Lin-jing. The study on kinematic and dynamic characteristics of lifting pipe in deep ocean mining[D]. Beijing: University of Science and Technology Beijing. School of Civil & Environment Engineering, 2000.
[10] 冯雅丽, 张云仙, 李浩然. 5 000 m扬矿管的纵向振动[J]. 金属矿山, 1999(4): 13-15.
FENG Ya-li, ZHANG Yun-xian, LI Hao-ran. Axial oscillation of a 5 000 m lifting pipe[J]. Metal Mine, 1999(4): 13-15.
[11] 刘江, 毛纪陵, 刘北英. 深海采矿扬矿管横向运动状态分析[J]. 中国工程科学, 2001, 3(11): 74-79.
LIU Jiang, MAO Ji-ling, LIU Bei-ying. Dynamic analysis for the lateral movement of a lifting pipe in deep sea mining[J]. Engineering Science, 2001, 3(11): 74-79.
[12] Schwarz W, Grebe H. Workshop on proposed technologies for deep seabed mining of polymetallic nodules[R]. Universit?t-GH Siegen, 1999.
[13] 简曲, 何永森, 王明和, 等. 大洋采矿输送软管动力特性的数值研究[J]. 海洋工程, 2001, 19(2): 59-64.
JIAN Qu, HE Yong-sen, WANG Ming-he, et al. Numerical study of dynamic behavior of flexible pipes in deep sea mining[J]. Ocean Engineering, 2001, 19(2): 59-64.
[14] 郭小刚. 深海采矿流-固耦合软管系统的非线性动力学模型[J]. 工程力学, 2000, 17(3): 93-104.
GUO Xiao-gang. Nonlinear dynamic modeling of the fluid-solid-coupled flexible pipe systems for deep sea mining[J]. Engineering Mechanics, 2000, 17(3): 93-104.
[15] LI Li, LIU Shao-jun. Kinematic simulation of COMRA’s self-propelled vehicle[C]//Proc 5th Pacific/Asia Offshore Mech Symp, ISOPE. Daejeon, Korea, 2002: 89-95.
[16] 益其乐, 盛庆武, 杨显成. 带小圆管圆柱振荡流中流体动力系数试验研究[J]. 中国造船, 2001, 42(2): 19-25.
YI Qi-le, SHENG Qing-wu, YANG Xian-cheng. Experimental study on fluid dynamic coefficients of circular cylinders with small tubes in oscillating flow[J]. Ship Building of China, 2001, 42(2): 19-25.
(编辑 陈灿华)
收稿日期:2011-06-15;修回日期:2011-07-15
基金项目:国际海底区域研究开发“十一五”项目(DYXM-115-04-02-01)
通信作者:王刚(1976-),男,湖南长沙人,博士,副教授,从事海洋作业装备设计与控制研究;电话:15111319695;E-mail: wgyy528@126.com

