DOI: 10.11817/j.issn.1672-7207.2019.01.030
���ֶ��������綯������ʻ״̬��������
����1������1, 2����Ӣ��1, 2������1, 2�����Ʊ�1, 2
(1. ���մ�ѧ �����뽻ͨ����ѧԺ������ ��212013��
2. ���մ�ѧ ���������о�Ժ������ ��212013)
ժҪ�����������ɶȳ���ģ������̥ģ�ͣ������������ģ�Ͳ�����Ӧ�õ������������У���������Ӧ�߽�ģ�۲���ʵ����̥�������Ĺ��ƣ������������۲���(longitudinal force observer, LFO)���ֵ��Ϊ��֪���룬�����Ϣ�ں��˲�(information fusion filter, IFF)�㷨���һ�ֳ���״̬�������Ʒ��������з���ʵ�顢̨��ʵ���Լ�ʵ����·ʵ�顣�о������������Ƶ��������۲������нϸߵ����������ƾ��ȣ�������Ϣ�ں��˲��ij���״̬���Ʒ����ܹ�ʵʱ���ٳ���״̬�ҹ�������������չ�������˲�(extended Kalman filter, EKF)��
�ؼ��ʣ��綯���������ֶ������������������ƣ�����״̬���߽�ģ�۲���
��ͼ����ţ�U461.1 ���ױ�־�룺A ���±�ţ�1672-7207(2019)01-0241-09
Cascaded method for running state estimation of four-wheel independent drive electric vehicles
CHEN Te1, CHEN Long1, 2, CAI Yingfeng1, 2, XU Xing1, 2, JIANG Haobing1, 2
(1. School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China;
2. Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China)
Abstract: The vehicle model with 3 degree of freedom and the tire model were established. An electric drive wheel model was presented and applied to the longitudinal force estimation. The estimation of tire longitudinal force was realized based on the adaptive high order sliding mode observer. Using the output values of longitudinal force observer as the known input and combining the information fusion filter algorithm, a vehicle state joint estimation method was proposed. The simulation, bench test and road test were carried out. The results show that the designed longitudinal force observer has high estimation accuracy, and the information fusion filter-based vehicle state estimation method can track the vehicle state in real time and has better estimation performance than extended Kalman filter.
Key words: electric vehicle; four-wheel independent drive; longitudinal force estimation; vehicle state; high order sliding mode observer
������ԴΣ���뻷����Ⱦ������������أ��Ե綯����Ϊ��������Դ�����õ���������ҵ�Ĺ�ע��㷺�о�[1-3]�����ֶ��������綯������4����챵���Զ����ɿأ���һ�ŵ�Ϊ����������ȫ���ơ������ȶ��Կ����Լ�ת�ؽ��ܿ����ṩ�˸��ߵIJ������ɶȣ���������Ϊ������ҵ���о��ȵ�֮һ[4]������״̬��ȷ�����ǵ綯������ȷ�˶����Ʋ��ɻ�ȱ��һ��������ģ�͵ij���״̬�۲�����ƿ����õͳɱ�������ʵ�ֶ���Ҫ����״̬��ʵʱ���ƣ��Ӷ�����۸�Ĵ�������������ʵ��Ӧ�á���ˣ����б�Ҫ�������ֶ��������綯������ʻ״̬���Ƶ��о���Ŀǰ�����������ʻ״̬���Ƶ��о����������Ʒ��������������˲���[5-6]���Ż����Ʒ�[7]�������Թ۲���[8-10]�ͻ�ģ�۲���[11]�ȡ�����LI��[5]�����һ�ֻ���ģ������Ӧ�����˲����С���任�ķ�����ʵ����������ʻ״̬������Ӧ���ơ������г���״̬���Ʒ�����о��������Դ�ͳ��ȼ������[4-10]��������ֶ��������綯������״̬���ƻ����١�������˹����[8]�����һ����̥���������Ʒ���������ƵĹ۲�����Ҫ����������Ť�ء�ת�ٺ��ָ�ѹ���Ȳ������룬�Թ۲���Ҫ��ϸߡ�HORI��[10]���ݳ�����ת����ѧ���̶Գ���ת�ٽ��л�����������̥�����������÷���ͬʱ������Ҳ�����˻��ֵ��¹��ƾ��Ȳ��㡣���ֶ��������綯�����У�����챵������̥��ɵĵ������ֲ�����һ���������Ʋ��Ե�ִ�л�����Ҳ��һ����Զ����Ŀ��Ƶ�Ԫ����Ϣ��Ԫ���������õ������ֵ��������ԣ�����챵���ĵ�����ת�ټ�ĸ�ߵ�ѹ��Щ�õĵͳɱ���������ϢӦ�õ�״̬�����У����ܳ���������ֶ��������綯�������ŵ㣬���ٹ��Ƴɱ�����Ŀǰ������ֶ��������綯����״̬���Ƶ��о���δ���ǵ���һ���ƣ�û�н���챵��ģ�Ϳ��ǽ�ȥ[12-13]�����˵�[14-15]���ڵ�������ģ�ͼ�����������ʵ������̥�������Ĺ��ƣ���δ�ܽ���Ӧ�õ�����״̬�����С�Ϊ����������ֶ��������綯�����������ƣ��������߽���������ģ��Ӧ�õ�����״̬�����У���������Ӧ�߽�ģ�۲�������̥���������й��ƣ���������Ϣ�ں��˲��㷨�����һ�ֳ���״̬�������Ʒ��������÷����ʵ����֤����������Ʒ����ij���״̬����Ч����Ϊ���ֶ��������綯����������ȫ������ת���Ż������о��ṩ������
1 ��������ѧģ��
1.1 �����ɶȳ���ģ��
��ͼ1��ʾ�����������������Լ�����˶��������ɶȳ�������ѧģ�͡�ͼ1�У��̶��������ϵĶ�����ϵxoyԭ�������������غϣ�x��Ϊ��������Գ��ᣬ�涨��ǰΪ����y��ͨ���������ģ��涨����Ϊ������������ϵƽ���ڵĽǶȺ���������ʱ�뷽��Ϊ��������ʸ���ķ�������������ͬ��Ϊ�������������Լ����������˶�������������y��ĸ����˶�����x��IJ����˶�����Ϊ����������̥�Ļ�е������ͬ��ͼ1�У�����1��2��3��4�ֱ��Ӧ��ǰ����ǰ�������Һ��֡������ɶȳ���ģ�͵Ķ���ѧ����Ϊ
 (1)
(1)
ʽ�У�vxΪ�����٣�vyΪ�����٣���Ϊ��ڽ��ٶȣ�mΪ����������Fxj��Fyj(j=1,2,3,4)�ֱ�Ϊ��̥���������Ͳ���������Ϊǰ��ת�ǣ�IzΪ��z���ת��������lfΪ���ľ�ǰ��ľ��룻lrΪ���ľ����ľ��룻bfΪǰ�־��1/2��brΪ���־��1/2��
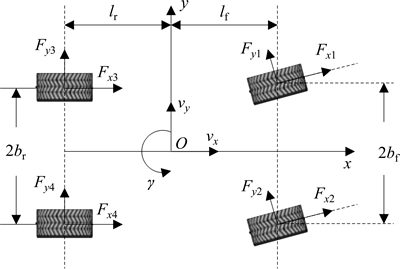
ͼ1 �����ɶȳ���ģ��
Fig. 1 Vehicle model with 3 degree of freedom
1.2 ��������ģ��
���ֶ��������綯����ÿ�����ָ���һ����챵����������������챵���ͳ�����ɵ���������һ��������������Ԫ��������ģ����ͼ2��ʾ���������ֵ���ת����ѧ����Ϊ
 (2)
(2)
ʽ�У���jΪ������Fxj����Ӧ���ֵ�ת�٣�J1Ϊ����ת��������rΪ������Ч�뾶��TLjΪ��װ�ڳ�������챵���ĸ������ء�
��챵��������ϵ�ת��ƽ�ⷽ��Ϊ
 (3)
(3)
��챵����Ч��·�Ķ�̬��ѹƽ�ⷽ��Ϊ
 (4)
(4)
ʽ�У�J2Ϊ���ת�ӵ�ת��������bΪ����ϵ����KtΪ���ת�س�����ijΪ�ߵ�����ujΪ�ߵ�ѹ��RΪ�����Ч�ߵ��裻LΪ�����Ч��У�KaΪ���綯��ϵ����

ͼ2 ��������ģ��
Fig. 2 Electric driving wheel model
1.3 ��̥ģ��
���ð뾭��ħ����ʽ����̥ģ�Ͷ���̥���������й��ƣ���ʽΪ
 (5)
(5)
ʽ�У�BΪ�ն����ӣ�CΪ������״���ӣ�DΪ��ֵ���ӣ�EΪ�����������ӣ� Ϊ���ֲ�ƫ�ǡ�
Ϊ���ֲ�ƫ�ǡ�
��̥ģ�Ͳ���B��C��D��E������̥�Ĵ�ֱ�غ���أ�����̥�Ĵ�ֱ�غ�Ϊ
 (6)
(6)
ʽ�У�Fz1��Fz2��Fz3��Fz4Ϊ��Ӧ��̥�Ĵ�ֱ�غɣ�hΪ���ĸ߶ȣ�gΪ�������ٶȡ�
����̥��ƫ��Ϊ
 (7)
(7)
ʽ�У� ��
�� ��
�� ��
�� Ϊ��Ӧ��̥�IJ�ƫ�ǡ�
Ϊ��Ӧ��̥�IJ�ƫ�ǡ�
2 �������۲������
2.1 ��������ģ�;�ȷ���Ի�����
��ʽ(2)��(3)��(4)�����ɵ�
 (8)
(8)
���У�J=J1+J2Ϊ��������ת����������a11=-R/L��a12=-Ka/L��a21=Kt/J��a22=b/J��g1=1/L��g2=-r/J�����������ģ�͵�ϵͳ���̿ɱ�ʾΪ
 (9)
(9)
���� ��
�� ��
�� ��
�� ��
�� ����֪����uΪ�ߵ�ѹ��δ֪����dΪ��������
����֪����uΪ�ߵ�ѹ��δ֪����dΪ��������
��������ģ��(9)Ϊһ��2����2����ķ����Է���ϵͳ����������������ɵã�
��ˣ����� ����Ϊ2����ϵͳά����ȡ��������֪��������D1=[g1]��D2=[g1, g2]��D3=[g1, g2, adfg1]��D4=[g1, g2, adfg1, adfg2]��Ϊ������������֪D1��D2��D3��D4���ǶԺϵġ��Ӷ��ƶϵ�������ģ�����㾫ȷ���Ի�������
����Ϊ2����ϵͳά����ȡ��������֪��������D1=[g1]��D2=[g1, g2]��D3=[g1, g2, adfg1]��D4=[g1, g2, adfg1, adfg2]��Ϊ������������֪D1��D2��D3��D4���ǶԺϵġ��Ӷ��ƶϵ�������ģ�����㾫ȷ���Ի�������
2.2 ��������Ӧ�߽�ģ�۲���������������
���ݵ�������ģ���ص�ɹ�������任����z=��(x)=[z1 z2 z3 z4]T=[h1(x) Lfh1(x) h2(x) Lfh2(x)]T�������� �ɵ�
 (10)
(10)
z1��z2��z3��z4������״ֵ̬����x1��ת��x2����Ϣ����ֻȡz1��z2����������任���ϵͳ����������ģ��ת��Ϊ
 (11)
(11)
������Ϊģ��δ֪��������Ϊ�˹���������������һ���µĉ���״̬��z5����ϵͳ(11)������Ϊ
 (12)
(12)
���ڳ������㷨����Ƹ߽�ģ�۲�������
 (13)
(13)
���� ��
�� ��
�� �ֱ�Ϊ״̬��z1��z2��z5������ʱ���ڵľ�ȷ���ƣ���1����2�ͦ�3Ϊ��ģ�۲������棻k1��k2��k3Ϊ�ȶ����������Ҷ�����0��ͨ��ѡȡ���ʵĦ�1����2�ͦ�3����������ʱ����ʹ�˶��켣�ﵽ��ģ��e1��e2��e3 (
�ֱ�Ϊ״̬��z1��z2��z5������ʱ���ڵľ�ȷ���ƣ���1����2�ͦ�3Ϊ��ģ�۲������棻k1��k2��k3Ϊ�ȶ����������Ҷ�����0��ͨ��ѡȡ���ʵĦ�1����2�ͦ�3����������ʱ����ʹ�˶��켣�ﵽ��ģ��e1��e2��e3 ( ��
�� ��
�� )�ϡ�Ϊ�˶�̬���ڸ߽�ģ�۲����棬��ƻ�ģ��������Ӧ�����£�
)�ϡ�Ϊ�˶�̬���ڸ߽�ģ�۲����棬��ƻ�ģ��������Ӧ�����£�
 (14)
(14)
�ø߽�ģ�۲�����ͬʱʵ�ֵ�������ģ������任���ϵͳ״̬��ϵͳ״̬�ֵĹ��ƣ���ʽ(11)��(12)������������۲������£�
 (15)
(15)
���ø�δ֪����۲�������ʵ���������Ĺ��ơ�
3 ������Ϣ�ں��˲��ij���״̬����
�������ɶȳ���ģ�ͣ��ɽ���������ɢʱ�������̬ϵͳ���̣�
 (16)
(16)
ʽ�У�xkΪ״̬������zkΪ����������ukΪ����������AkΪ״̬ת�ƾ���BkΪ�������DkΪ��������HkΪ�������wk��vk�ֱ�Ϊ���ϸ�˹�ֲ��Ĺ�������������������һ��Ŀ������˲�ͨ����״̬Э���������зֽ⣬�����ʵʱ������������ֵ������ȶ��ԡ�������ֽ�Ӵ��˼����������Ƶ�ʵʱ���ܵ���һ�������ơ�
����������Ϣ������أ�������Э�������Ϊ�Խ���������Ϣ�ں����ۣ���
 ��
��
 ��
��
����
 (17)
(17)
��Rk����ʽ(17)�ɵ�
 (18)
(18)
ͬ���أ��� ����ʽ(18)�ɵ�
����ʽ(18)�ɵ�
 (19)
(19)
�� ��
�� ���ɵã�
���ɵã�
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
���ݾ������湫ʽ���ɵ�
 (24)
(24)
��

 (25)
(25)
��ʽ(24)��(25)����ʽ(22)��(23)�ɵã�
 (26)
(26)
 (27)
(27)
����ʽ(20)��(21)��(26)��(27)�����ɵõ�ϵͳ״̬�ĵ��ƹ���ֵ���㷨����ͼ��ͼ3��ʾ��

ͼ3 ��Ϣ�ں��˲�����ͼ
Fig. 3 Flow chart of information fusion filtering
���ڸ���������ں��˲��㷨��Ƴ���״̬���Ϲ��Ʒ���������״̬���� ����������
���������� ����������
����������
 ��ax��ay�ֱ�Ϊ�����ڴ������ϵ�ϵ�������ٶȺͲ�����ٶȣ�������
��ax��ay�ֱ�Ϊ�����ڴ������ϵ�ϵ�������ٶȺͲ�����ٶȣ�������
 (28)
(28)
����ǰ�����������������Ʒ��������4���������ֱַ�����������۲������ҽ����õ�����������ֵ��Ϊ��������IJ���ֵ���Ӷ���Ϊ������ʻ״̬�������Ƶ��������������ݺ����ٵ��˲����ƣ��ɽ�һ����������������IJ�ƫ��Ϊ
 (29)
(29)
4 ����ʵ��
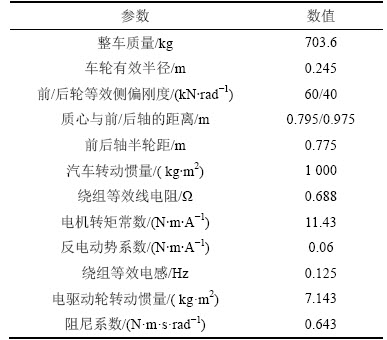
Ϊ��֤����������Ʒ�������Ч�ԣ�����Carsim��Simulink������˳������Ϸ���ƽ̨�����з������������������1��ʾ��
��1 �������
Table 1 Simulation parameters
4.1 ˫���߹���
Ϊ��֤����Ƶ��������۲�������Ч����ͬʱ���ǵ���������ģ�ͺ���δ֪�������������ڵ�������ģ�������δ֪����۲���(unknown input observer��UIO)[16]�뱾����Ƶ��������۲������жԱȡ����Ƚ�����˫���߹����µĵ�·����ʵ�飬��������������˫���߹�����ͼ4��ʾ������Ϊ25 m/s��·�渽��ϵ��Ϊ0.8����������ͼ5��ʾ����ͼ5(a)��֪��������Ƶ�LFO���Ƴ�������������ʱ��һ����壬����嶥����Խ�С�Һܿ������������ȶ���������˲�䣬��챵������˲�������������������ڿ�ʼ�β�����Խ�Ϊ���ҡ����⣬�����������ǻ�ģ�۲����������ص㣬LFO���Ƶ����������н϶�ġ�������ͨ���ֲ��Ŵ���Է�����������������������˵�dz�С����˥����֤����LFO��ƹ���������ĸ߽�ģ�㷨���нϺõĶ�̬���ڡ�����Ӧ�������������������ͨ��UIO���и��ߵĹ��ƾ��ȡ����ڳ�������˲�䲢���dz�����ʻ�ij�̬����ˣ���̬��ʻ���������õĹ������ܸ��Ӿ��й���Ӧ�����壬�Ҵ�������������LFO�Ĺ���Ч������UIO�Ĺ���Ч����ͼ5(b)~5(e)��ʾΪ������Ƶ���Ϣ�ں��˲��㷨(��ΪIFF)����չ�������˲��㷨(��ΪEKF)�ij���״̬���ƶԱȡ����Կ������߶���ʵʱ���ٳ�����ʻ״̬����IFF���EKF���и��ߵĹ��ƾ��ȣ������������EKF���š�

ͼ4 ����˫���߹���
Fig. 4 Two successive double lane changes (DLC)
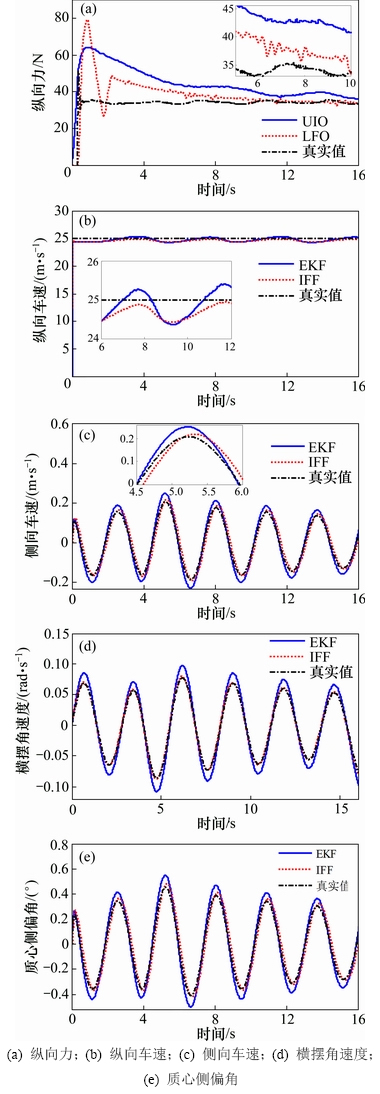
ͼ5 ˫���߹���������
Fig. 5 Simulation results of DLC manoeuvre
4.2 �㹳����
Ϊ��һ����֤����Ĺ��Ʒ����ڸ�����ʻ�����µĹ������ܣ������˵���·�������µ��㹳����������֤������ʱ��������ת����ͼ6��ʾ������Ϊ15 m/s��·�渽��ϵ��Ϊ0.4�����÷�������ͼ7��ʾ��ͼ7(a)��ʾΪ���������ƽ���Աȣ���ͼ5(a)��ͬ����ʱLFO��ʵʱ������������UIO��ʵʱ�������������������첢�����ȶ�����ͼ7(b)~7(e)��֪����·�渽��ϵ���ϵͣ�����ת��仯��������ʻ������Ϊ����ʱ��IFF���ܱ��ֽϺõĹ���Ч�����Ӷ���֤��������Ĺ��Ʒ����Ŀ���������������Ӧ������
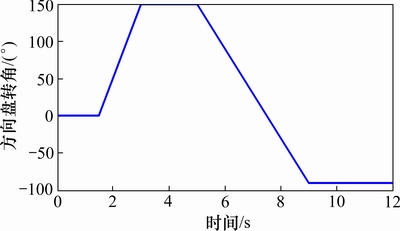
ͼ6 ������ת��
Fig. 6 Steering wheel angle
5 ʵ��ʵ��
5.1 ���̲��̨��ʵ��
ʵ���ó�Ϊ������һ���װ�����ֶ��������綯����������Ŀǰ�ó���δװ����̥������������������ͨ��������ʵʱ��ã����ڵ��̲��ʵ��̨���Ͻ������������Ƶ�ʵ����֤��ͼ8��ʾΪ���̲��̨��ʵ��ԭ��ͼ�����ڿ���ԭ��ʵ�ֳ������ƣ�����CAN���߲ɼ����ĵ�������ѹ��ת��ֵ��Ϊ�������۲��������룬�������Ƶ�������������̲�����ݲɼ�ϵͳ��õ���ʵ���������жԱ���֤������ѡȡ��ǰ�������ֵ�ʵ�����ݽ�����֤�������ͼ9��ʾ����ͼ9��֪���ڳ�������ʱ���������ƻ���һ����ƫ�ƫ����Խ�С��������������ʻʱ�����������������ȶ��Ҿ��нϸߵĹ��ƾ��ȡ�
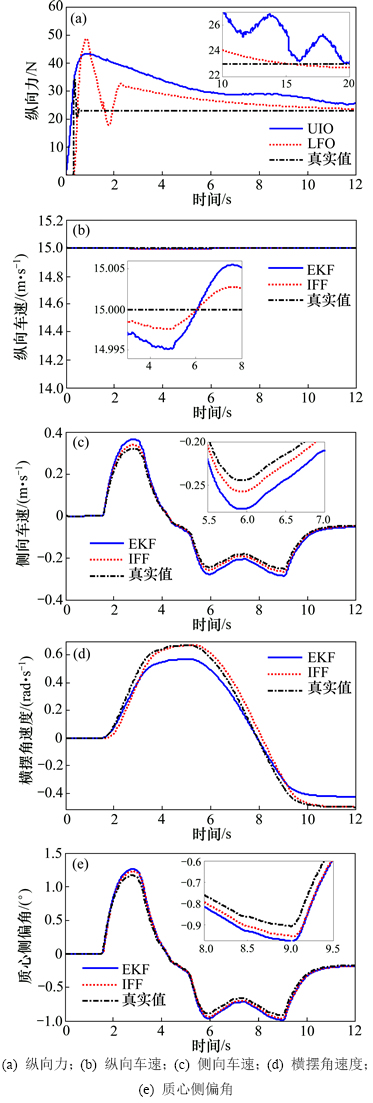
ͼ7 �㹳����������
Fig. 7 Simulation results of fishhookmanoeuvre
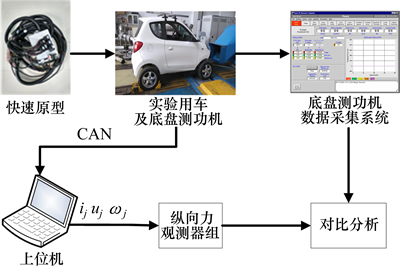
ͼ8 ���̲��̨��ʵ��ԭ��ͼ
Fig. 8 Schematic diagram of bench test on chassis dynamometer

ͼ9 ���������ƽ��
Fig. 9 Longitudinal force estimation result
5.2 ʵ����·ʵ��
ʵ����·ʵ�鳡����ʵ��װ����ͼ10(a)��ʾ����·��ÿ��30 m���ű�������ͨ���������Ͻ������ε�·ʵ�飬���ø߾��Ȳ��GPS�ɼ��ݺ����ټ����IJ�ƫ�ǣ�����װ�òɼ��ݺ�����ٶȼ���ڽ��ٶȣ����١���������ѹ����Ӧ�Ĵ�������ã�����ǰ��ת�Ǹ��ݷ�����ת�ǻ���õ�������CAN���߲ɼ���������Ϣ��ͨ��Vehicle Spy���д��������ݼ�¼�����õij���״̬��ͼ10(b)~(e)��ʾ���������۲����ѽ����˵��̲��̨��ʵ����֤����˽���·ʵ����������������ֵ��Ϊ�˲�������������������룬���ó���״̬���ƽ����ͼ11��ʾ����ͼ11��֪��2���˲��㷨���нϺõĹ���Ч������IFF���EKFʵʱ�����������ã����ƾ��ȸ��ߡ�

ͼ10 ʵ����·ʵ��
Fig. 10 Vehicle road test

ͼ11 ����״̬����ʵ����
Fig. 11 Experimental results of vehicle state estimation
6 ����
1) ������ֶ��������綯���������ص����������ƣ�����챵��ģ���복�ֶ���ѧ������ϵ���������������ģ�ͣ�������Ӧ�õ�����״̬�����У����õͳɱ�����������ʵʱ���������ƣ������˹��Ƴɱ���Ϊ����״̬�����ṩ���µ�˼·��
2) ��������Ӧ�߽�ģ�۲��������һ���µ��������۲�����Ʒ�������ʵ�ֵ�������ģ�͵�δ֪������ơ�ͬʱ������Ӧ�߽�ģ�۲�������˹��Ƶľ����뿹����������
3) ������Ϣ�ں��㷨����ij���״̬���Ʒ������������۲����Ĺ��������Ϊ��֪����ֵ���ܹ�ʵ�ֳ���״̬��ʵʱ���ơ�IFF���EKF���и��ߵĹ��ƾ������ǿ��ʵʱ����������
�ο����ף�
[1] ��ƽ, ��Դ, ���. �ֲ�ʽ�����綯��������ѧ���Ʒ�չ��״����[J]. ��е����ѧ��, 2013, 49(8): 105-114.
YU Zhuoping, FENG Yuan, XIONG Lu. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(8): 105-114.
[2] ��־ǿ, ������, ���ٻ�. ���Dz��������ȵĵ綯���������ƶ�ģ������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(11): 3700-3706.
LIU Zhiqiang, WANG Haolei, DU Ronghua. Fuzzy control method of regenerative braking in electric vehicles considering parameter sensitivity[J]. Journal of Central South University (Science and Technology), 2016, 47(11): 3700-3706.
[3] ������, ������, ����, ��. ���ڵ綯�����Ĵż��ɽṹDC/DC�任��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(3): 694-700.
XIA Xiangyang, KONG Xiangji, TANG Xin, et al. Integrated magnetics structure DC/DC converter for electric vehicles[J]. Journal of Central South University(Science and Technology), 2017, 48(3): 694-700.
[4] ������, ������, ����η. ������Ⱥ�����㷨����������Ť�ط�����Ʋ���[J]. ũҵ��еѧ��, 2015, 46(11): 369-376.
CHENLiqing, HUDongbao, CHENWuwei. Control strategy and experiment of torque distribution for 4WD vehicle based on SOA[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 369-376.
[5] LI Xu, SONG Xiang, CHAN Chingyao. Reliable vehicle sideslip angle fusion estimation using low-cost sensors[J]. Measurement, 2014, 51: 241-258.
[6] LI Liang, JIA Gang, RAN Xu, et al. A variable structure extended Kalman filter for vehicle side slip angle estimation on a low friction road[J]. Vehicle System Dynamics, 2014, 52(2): 280-308.
[7] RAJAMANI R, PIYABONGKARN D, LEW J Y. Tire-road friction coefficient estimation[J]. IEEE Control System Magazine, 2010, 30(4): 54-69.
[8] ��˹��, ��С��, �º�. һ�����͵���̥���������Ʒ���[J]. ��Ϣ�����, 2015, 44(2): 203-214.
YANG Siqi, XIE Xiaohua, CHEN Hong. Vehicle tire forces estimation using a novel cascade method[J]. Information and Control, 2015, 44(2): 203-214.
[9] �ֳ�, �ܷ��, ��־��, ��. ���ڲ�������Ӧ�����㷨�ij���״̬��������[J]. ũҵ��еѧ��, 2014, 45(11): 1-8.
LIN Cheng, ZHOU Fengjun, XU Zhifeng, et al. Estimation of vehicle status parameters based on compensation adaptive control algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(11): 1-8.
[10] HORI Y. Future vehicle driven by electricity and control-research on four-wheel-motored ��UOT electric march II��[J]. Vehicle System Dynamics, 2012, 50(9): 1473-1494.
[11] RATH J, VELUVOLU K, DEFOORT M, et al. Higher-order sliding mode observer for estimation of tyre friction in ground vehicles[J]. IET Control Theory and Applications, 2014, 8(6): 399-408.
[12] �ֳ�, ����, �����, ��. ����LO-EKF�㷨�ķֲ������綯����״̬���Ƶ��о�[J]. ��������, 2014, 36(11): 1316-1320.
LIN Cheng, WANG Gang, CAO Wanke, et al. A study on the vehicle state estimation for a distributed-drive EV based on LO-EKF algorithms [J]. Automotive Engineering, 2014, 36(11): 1316-1320.
[13] SOLMAZ S, BASLAMISH S. A nonlinear sideslip observer design methodology for automotive vehicles based on a rational tire model[J]. International Journal of Advanced Manufacturing Technology, 2012, 60: 765-775.
[14] ����, ����, ����, ��. ����UIO/˫KF��4WID-EV����������������[J]. ��������, 2016, 38(9): 1095-1100.
XU Xing, CHEN Te, CHEN Long, et al. Longitudinal force estimation of driving wheels in 4WID-EV based on unknown input observer and dual kalman filters[J]. Automotive Engineering, 2016, 38(9): 1095-1100.
[15] ����, ����, ����, ��. ���ڸĽ��ջ��ӿռ��ʶ�ĵ綯����������������[J]. ���մ�ѧѧ��(��Ȼ��ѧ��), 2016, 37(6): 650-656.
XU Xing, CHEN Te, CHEN Long, et al. Longitudinal force estimation for motorized wheels driving electric vehicle based on improved closed-loop subspace identification[J]. Journal of Jiangsu University(Natural Science Edition), 2016, 37(6): 650-656.
[16] HOU M, MULLER P C. Design of observer for linear systems with unknown inputs[J]. IEEE Transactions on Automatic Control, 1992, 37(6): 871-875.
(�༭ ����ƽ)
�ո����ڣ�2018-02-13�������ڣ�2018-06-07
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(U1564201��U1664258)������ʡ��333��������Ŀ(BRA2016445)������ʡ�ص��з��ƻ���Ŀ(BE2017129��BE2016149)������ʡ��У��Ȼ��ѧ����������Ŀ(16KJB580012) (Projects(U1564201, U1664258) supported by the National Natural Science Foundation of China; Project(BRA2016445) supported by the ��333 Project�� of Jiangsu Province; Projects(BE2017129, BE2016149) supported by the Primary Research & Development Plan of Jiangsu Province; Project(16KJB580012) supported by the Natural Science Foundation of Colleges and Universities in Jiangsu Province)
ͨ�����ߣ���������ʿ�����ڣ���ʿ����ʦ�����³�����̬����ģ������Ƶ��о���E-mail: chenlong@ujs.edu.cn

