
ARTICLE
J. Cent. South Univ. (2019) 26: 1637-1648
DOI: https://doi.org/10.1007/s11771-019-4118-3

Nonlinear cascade control of single-rod pneumatic actuator based on an extended disturbance observer
LI Ai-min(���)1, MENG De-yuan(�ϵ�Զ)1, LU Bo(·��)2, LI Qing-yang(������)1
1. School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou 221116, China;
2. National Quality Supervision and Inspection Centre of Pneumatic Products, Ningbo 315500, China
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Abstract: Precise position tracking control of the single-rod pneumatic actuator is considered and a nonlinear cascade controller is developed. The proposed controller comprises an extended disturbance observer (EDOB) and a nonlinear robust control law synthesized by the backstepping method. The EDOB is designed to estimate not only the influence of disturbances but also the parameter uncertainties. With the use of parameter and disturbance estimates, the nonlinear cascade controller, which consists of an outer position tracking loop and an inner load pressure loop, is further designed to attenuate the effects of parameter and disturbance estimation errors. The stability of the closed-loop system is proven by means of Lyapunov theory. Extensive comparative experimental results obtained verify the effectiveness of the proposed nonlinear cascade controller and its performance robustness to parameter and external disturbance variations in practical implementation.
Key words: electro-pneumatic servo system; extended disturbance observer; cascade control; robust control; position tracking
Cite this article as: LI Ai-min, MENG De-yuan, LU Bo, LI Qing-yang. Nonlinear cascade control of single-rod pneumatic actuator based on an extended disturbance observer [J]. Journal of Central South University, 2019, 26(6): 1637-1648. DOI: https://doi.org/10.1007/s11771-019-4118-3.
1 Introduction
Electro-pneumatic servo systems are widely used in many applications such as robot manipulators [1], industrial automation equipment [2], and test devices [3], since they possess advantages such as cleanliness, low operating cost, cheapness, high power/weight output, no magnetic field, and no risk of overheating [4, 5]. However, the dynamics of electro-pneumatic servo systems have strong nonlinearities, such as nonlinear relationship between flow and pressure through the control valve, actuator thermodynamics, and friction. Furthermore, electro-pneumatic servo systems are likely to be affected by variations in the physical parameters and unknown external disturbances in industrial applications. These characteristics make controller design of electro- pneumatic servo systems a challenging task.
Since the fixed-gain linear control methods cannot guarantee satisfactory position tracking accuracy of electro-pneumatic servo systems [6], techniques such as gain scheduling [7], optimal control [8], feedback linearization [9], observer based friction compensation [10], model reference adaptive control [11], and self-tuning control [12] were adopted in many studies. However,unmodelled dynamics and external disturbances, which can easily degrade system performance, are not taken into account explicitly in these control strategies. In view of the fact that sliding mode control has been verified to be an effective method to deal with the effects of system uncertainties and external disturbances, it was applied to electro- pneumatic servo systems by lots of researchers during the past decade [13-15]. Furthermore, in order to reduce the chattering in control signal, several types of adaptive-gain sliding mode controllers were proposed [16-18]. As an alternative to higher order sliding mode controllers, the backstepping technique was utilized to develop nonlinear robust controllers for electro-pneumatic servo systems [19-21]. In addition, a cascade controller which consists of three blocks was proposed for a pneumatic cylinder controlled by two servo valves [22, 23]. The disadvantage of this cascade controller is that the requirement of an extra servo valve adds more than 500 dollars per axis of the electro-pneumatic servo system. It should also be noted that because only large nonlinear feedback is employed to attenuate the effects of parameter uncertainties, unmodelled dynamics and external disturbances, the aforementioned robust controllers suffer from quite severe control input chattering when stringent control performance is of major concern. Recently, the adaptive robust control (ARC) method was used for motion control of pneumatic rodless cylinders [24-26]. Unlike the robust controllers proposed in Refs. [17-23], the ARC controller employs the on-line parameter estimation to obtain reliable estimates of some unknown model parameters, and utilizes the sliding mode control technique to deal with other model uncertainties and disturbance. Thus, the position tracking accuracy and robustness of electro-pneumatic servo systems can be further improved. However, the physical model based parameter estimation utilized in the ARC controller is rather complicated for practical implementation.
In the last decade, disturbance observer-based control (DOBC) technique has received a great deal of attention and interest because of its faster response in handling the disturbances, ease of implementation, and less conservativeness [27, 28]. In these studies, parameter uncertainties, unmodelled dynamics as well as external disturbances were generally treated together as the lumped disturbance. Furthermore, the influence of the lumped disturbance was estimated by an observer and then suppressed by a single control action. The effectiveness of the disturbance observer has been validated through applications to many engineering fields, for example, electro- hydraulic systems [29-34], 6-DOF parallel manipulator [35], 2-DOF robotic arm [36], pneumatic muscle [37], and servo motors [38]. However, due to the fact that rather severe parameter uncertainties normally exist in the controlled systems, the achievable performances of disturbance observer-based control strategies are not better than that of robust adaptive controller or adaptive robust controller in most cases.
In order to overcome the ARC problem and inspired by the work of DOBC, a nonlinear cascade controller based on an extended disturbance observer (EDOB) is developed for position tracking control of the single-rod pneumatic actuator. In contrast to most of the existing disturbance observer, the proposed EDOB estimates the parameter uncertainties and the influence of unmodelled dynamics and external disturbances separately. Based on the parameter and disturbance estimate, a nonlinear cascade controller is synthesized by making use of backstepping method. The stability of the closed-loop system is proven by means of Lyapunov theory. The paper is organized as follows: Section 2 gives the dynamic models and problem statement; Section 3 presents the nonlinear cascade controller; Section 4 gives the experimental results to verify the proposed controller; and Section 5 draws the conclusions.
2 Dynamic models and problem statement
As shown in Figure 1, the electro-pneumatic servo system considered in this paper consists of a single-rod actuator (FESTO DNC-32-500-PPV) and a 5/3-way proportional directional control valve (PDCV, FESTO MPYE-5-1/8-HF-010B). The motion of the piston-rod-load assembly can be expressed as
 (1)
(1)
where x, and
and are the piston position, velocity and acceleration, respectively; m is the normal mass of external load plus piston-rod assembly and slider;
are the piston position, velocity and acceleration, respectively; m is the normal mass of external load plus piston-rod assembly and slider;
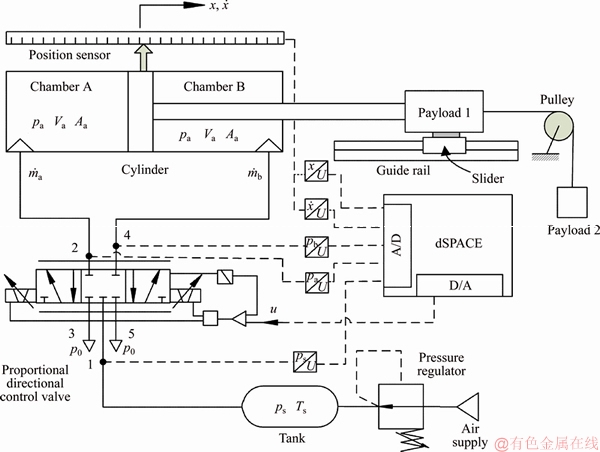
Figure 1 Schematic of electro-pneumatic servo system
pa and pb denote the absolute pressures of actuator chambers, p0 is the ambience pressure; Aa and Ab are the cross section areas of piston chambers; Ar is the cross section area of rod; b is the total load and cylinder viscous friction coefficient; Ff is the unknown friction coefficient; is a continuous function which is always chosen as=
is a continuous function which is always chosen as= 
 is utilized as the smooth approximation for the usual static discontinuous Coulomb friction force [24]; d represents unmodelled dynamics and external disturbances.
is utilized as the smooth approximation for the usual static discontinuous Coulomb friction force [24]; d represents unmodelled dynamics and external disturbances.
As shown in Ref. [39], the actuator pressure dynamic can be described by
 (2)
(2)
where R is the gas constant; �� is the ratio of specific heat capacities; Va and Vb are the volumes in the actuator chambers; Ts is the ambient temperature; Ta and Tb are the gas temperatures in the actuator chambers;  and
and are the mass flow rates entering the actuator chambers;
are the mass flow rates entering the actuator chambers;  and
and are the mass flow rates leaving the actuator chambers;
are the mass flow rates leaving the actuator chambers;  and
and  are the heat transfer between the air inside the actuator chambers and outside environment; np is the polytropic index of expansion or compression; ps is the supply pressure; Va0 and Vb0 are the dead volumes of the actuator chambers; L is the stroke of the actuator. The heat transfer between the air inside the actuator chambers and outside environment can be expressed as
are the heat transfer between the air inside the actuator chambers and outside environment; np is the polytropic index of expansion or compression; ps is the supply pressure; Va0 and Vb0 are the dead volumes of the actuator chambers; L is the stroke of the actuator. The heat transfer between the air inside the actuator chambers and outside environment can be expressed as
 (3)
(3)
where h is the thermal conductivity coefficient between air and inner walls of the actuator chambers and D is the piston diameter.
According to Ref. [24], the mass flow rates entering or leaving the actuator chambers can be calculated by

= (4)
(4)
where  is the mass flow rate; u is the PDCV��s input signal; A(u) is the effective flow area of PDCV [40]; Cd is the discharge coefficient; pu and pd are the upstream and downstream pressures; pr is the critical pressure ratio when choked flow occurs; Tu is the temperature of air which is entering the PDCV; �� is the minimal pressure ratio when laminar flow occurs, typically a value of ��=0.99 is used.
is the mass flow rate; u is the PDCV��s input signal; A(u) is the effective flow area of PDCV [40]; Cd is the discharge coefficient; pu and pd are the upstream and downstream pressures; pr is the critical pressure ratio when choked flow occurs; Tu is the temperature of air which is entering the PDCV; �� is the minimal pressure ratio when laminar flow occurs, typically a value of ��=0.99 is used.
Define the state variables 

 and
and  the electro-pneumatic servo system total model can be written as
the electro-pneumatic servo system total model can be written as
 (5)
(5)
The control objective is to design an EDOB based nonlinear cascade controller such that a given desired trajectory xd can be tracked by the output of system (5) y=x1, while guaranteeing a prescribed transient and final tracking accuracy. xd is assumed to be of at least second-order differentiable. The parametric uncertainties due to unknown b and Ff and unknown external disturbances will be explicitly considered in this paper. Since the extent of parametric uncertainties and external disturbances can be predicted, it is assumed that 
 and
and

3 Controller design
To deal with the position tracking control problem of the electro-pneumatic system, a nonlinear cascade controller based on an EDOB is developed as shown in Figure 2. Different from previous studies on disturbance observer, parameter uncertainties are no longer considered as a part of disturbance and it will be estimated separately in the proposed EDOB. With the use of parameter and disturbance estimates, the nonlinear cascade controller, which consists of an outer position tracking loop and an inner load pressure loop, is designed by employing the recursive backstepping methodology. Moreover, robust control law is adopted in the nonlinear cascade controller to deal with the effects of parameter and disturbance estimation errors.
3.1 Extended disturbance observer
Although the state x2 is measurable, it can also be estimated by the following observer:
 (6)
(6)
where 

 and
and  are the estimation of x2, b, Ff and d, respectively;
are the estimation of x2, b, Ff and d, respectively;  denotes the estimation error of x2, i.e.,
denotes the estimation error of x2, i.e.,
 is the observer gain. Defining the estimation errors of b, Ff and d as
is the observer gain. Defining the estimation errors of b, Ff and d as 
 and
and  , the dynamics of is then given by
, the dynamics of is then given by
 (7)
(7)
Based on the above state observer of x2, the following extended disturbance observer is used to estimate the parameter uncertainties and the influence of external disturbances as well as unmodelled dynamics separately:
 (8)
(8)
 (9)
(9)
 (10)
(10)
where 
 and
and  are the observer gains; ��1, ��2 and ��3 are extra corrector terms to be synthesized later to ensure the closed-loop system stability. In Eqs. (8)-(10), the projection mapping is
are the observer gains; ��1, ��2 and ��3 are extra corrector terms to be synthesized later to ensure the closed-loop system stability. In Eqs. (8)-(10), the projection mapping is
 (11)
(11)
where �� is a symbol that can be replaced by b, Ff and d.
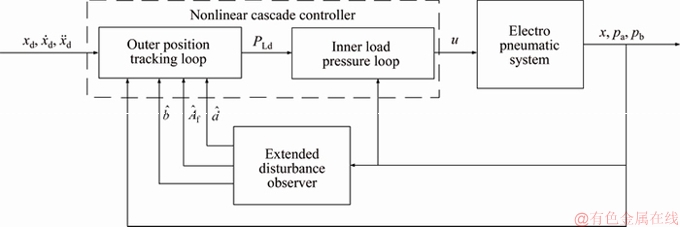
Figure 2 Block diagram of control system
Using similar arguments about projection mapping as in Ref. [41], one can easily prove that the above extended disturbance observer has the following properties:
P1
 (12)
(12)
P2  (13)
(13)
P3 
 (14)
(14)
P4  (15)
(15)
Define a positive semi-definite function V1as
 (16)
(16)
Differentiating V1 and noting Eqs. (7)-(10) yields


 (17)
(17)
3.2 Nonlinear cascade controller
Step 1: Design of outer position tracking loop
Define the position tracking error as  then a sliding surface is defined as follows:
then a sliding surface is defined as follows:
 (18)
(18)
where c0 is a positive feedback gain. Obviously, e1 is guaranteed to converge to a small value or zero by making s converging to a small value or zero. Therefore, the following design is to make s��0. The derivative of s can be written as

 (19)
(19)
Considering as a control variable, a virtual control law pLd is designed for Eq. (19) as follows:
as a control variable, a virtual control law pLd is designed for Eq. (19) as follows:
 (20)
(20)
where c1 is a positive feedback gain.
Define a positive semi-definite function V2as
 (21)
(21)
where w1>0 is a weighting factor. Let be the error variable denoting the difference between the actual and virtual controls of Eq. (19), i.e.,
be the error variable denoting the difference between the actual and virtual controls of Eq. (19), i.e.,  Differentiating V2 and noting Eqs. (5), (17), (19) and (20), one obtains
Differentiating V2 and noting Eqs. (5), (17), (19) and (20), one obtains

 (22)
(22)
Therefore, the extra corrector terms ��1, ��2 and ��3 of the extended disturbance observer are chosen as
 (23)
(23)
 (24)
(24)
 (25)
(25)
Substituting Eqs. (23)-(25) into Eq. (22) gives


 (26)
(26)
Step 2: Design of inner load pressure loop
Differentiating  and substituting the last two equations of Eq. (5) results in
and substituting the last two equations of Eq. (5) results in
 (27)
(27)
where ��=Ab/Aa.
Similarly, consider qL as a control variable, a virtual control law qLd is designed for Eq. (27) as follows:

 (28)
(28)
where c2 is a positive feedback gain, w2>0 is a weighting factor. Once qLd is obtained, the desired effective flow area of PDCV A(u) can be calculated by
 (29)
(29)
Thus, the PDCV��s input signal u can be further obtained according to the graph ��effective flow area vs input signal�� (see Ref. [40]). Substituting Eq. (28) into Eq. (27) gives
 (30)
(30)
Consider the following Lyapunov function candidate:
 (31)
(31)
Differentiating V3 and noting Eqs. (26) and (30) yields
 (32)
(32)
which can be further simplified, in view of Eqs. (13)-(15), as
 (33)
(33)
Thus, the stability of the closed-loop system consisting of the extended disturbance observer and the nonlinear cascade controller is guaranteed and all system signals are bounded.
4 Experimental results
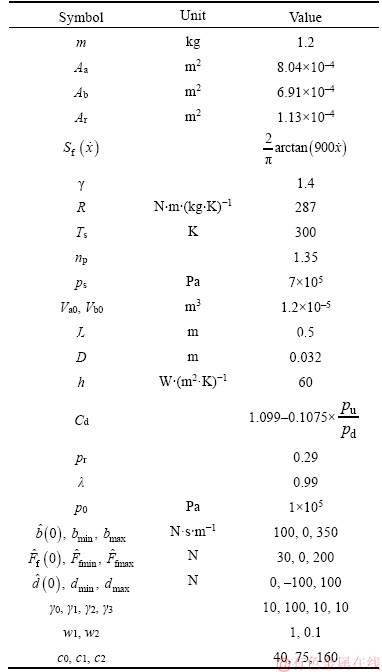
The electro-pneumatic servo system as shown in Figure 1 is built to test the performance of the proposed controller. Figure 3 shows the picture of the experimental setup. A pulley with attached weight is used to simulate the external disturbance. Three pressure sensors (FESTO SDET-22T-D10- G14-I-M12) are used to obtain the actuator chamber pressures and the tank pressure. A magnetostrictive linear position sensor (MTS RPS0500MD601V810 050) is used to directly measure the piston position and velocity. The system physical parameters are presented in Table 1. The control algorithms are programmed in Simulink on the host computer and implemented on the electro-pneumatic servo system through a dSPACE DS1103 control system. The sampling period is set to 1 ms.
To better verify the effectiveness of the proposed controller, the following three control algorithms are compared:
C1 The proposed EDOB based nonlinear cascade controller is presented in Sections 2 and 3. After trial and error, the parameters of the controller are chosen according to Table 1.
C2 Nonlinear robust controller. This control algorithm is the same as C1 but without using parameter estimation and disturbance observation (i.e., set ��1=��2=��3=0 in C1).
C3 ARC. This is the adaptive robust controller, which can be easily designed following the procedure [24].
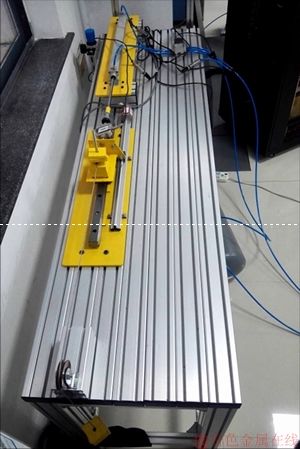
Figure 3 Photo of experimental setup
Table 1 Parameters of system and proposed controller
Three performance indices are utilized to qualify the control algorithms for a comparison.
1) Maximum absolute value of position tracking error is used as a measure of the transient performance, which is defined as
 (34)
(34)
2) Root-mean-square value of position tracking error is used as an index of the average tracking performance, which is defined as
 (35)
(35)
where T denotes the total running time.
3) Maximal absolute value of position tracking error during the last 10 s is used as an index of the stead-state tracking accuracy, which is defined as
 (36)
(36)
The above three controllers are first commanded to track the reference trajectory xd=0.125sin��t, and the tracking errors are plotted in Figure 4. The corresponding performance indices are collected in Table 2. As seen,  and
and  of C1 and C3 are much smaller than that of C2. It is because the influence of the parameter uncertainties and disturbances in electro-pneumatic system is estimated and compensated properly in C1 and C3, while C2 just uses strong nonlinear robust feedback to suppress the influence of the parameter variations and disturbances. Moreover,
of C1 and C3 are much smaller than that of C2. It is because the influence of the parameter uncertainties and disturbances in electro-pneumatic system is estimated and compensated properly in C1 and C3, while C2 just uses strong nonlinear robust feedback to suppress the influence of the parameter variations and disturbances. Moreover,  and of C1 are close to that of C3. This indicates the effectiveness of the proposed EDOB, which is much simpler than the model-based adaptive laws used in C3. Figure 5 shows the parameter and disturbance estimations of the EDOB. It can be seen that the estimates all converge and stay close to constant values quickly. Due to the fact that the modeling error in actuator pressure dynamic is not treated explicitly, C1 has a much bigger transient tracking error than C3. However, C1 can realize the tracking error improvement within the first cycle and thus is still acceptable in practical applications.
and of C1 are close to that of C3. This indicates the effectiveness of the proposed EDOB, which is much simpler than the model-based adaptive laws used in C3. Figure 5 shows the parameter and disturbance estimations of the EDOB. It can be seen that the estimates all converge and stay close to constant values quickly. Due to the fact that the modeling error in actuator pressure dynamic is not treated explicitly, C1 has a much bigger transient tracking error than C3. However, C1 can realize the tracking error improvement within the first cycle and thus is still acceptable in practical applications.

Figure 4 Tracking errors for a 0.5 Hz sinusoidal trajectory without external load and added mass for trajectory 0.125sin(��t):
Table 2 Experimental results in terms of performance indices
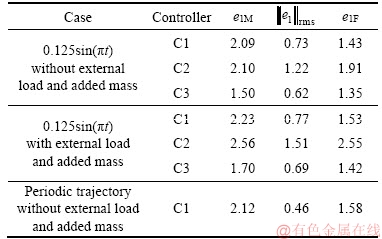
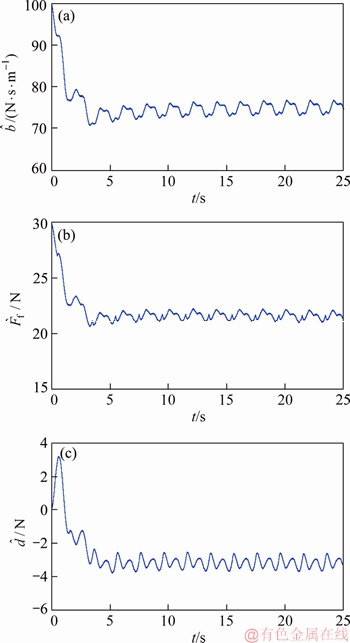
Figure 5 Parameters and disturbance estimation of proposed EDOB for 0.5 Hz sinusoidal trajectory motion without external load and added mass
The PDCV��s input signals of three controllers are given in Figure 6, which shows that the control input chattering of C1 is slightly bigger than that of C3. The chamber pressures of the proposed controller are omitted because they are all bounded as assumed.
To further verify the effectiveness of the proposed controller, the trajectory xd=0.05sin(1.25��t)+0.05sin(��t)+0.05sin(0.5��t) is considered. The tracking error of C1 and the system��s steady-state response are presented in Figures 7 and 8, respectively. The maximum tracking error e1M of C1 is about 2.12 mm, while the final steady-state tracking error e1F is about 1.58 mm.
To provide a comparison about the performance robustness of the above three controllers under parameter variations and external disturbance, a 19.6 N payload is added on the slider and another 19.6 N payload is attached to the pulley. For tracking a sinusoidal trajectory (frequency 0.5 Hz and amplitude 0.125 m), the tracking errors are shown in Figure 9 and the corresponding performance indices are collected in Table 2. The tracking performance of C2 degrades significantly, whereas the tracking errors of C1 and C3 remained almost unchanged, which further illustrates the necessity of parameter uncertainties and disturbance rejection. Figure 10 shows the parameter estimations of the proposed controller in this case.
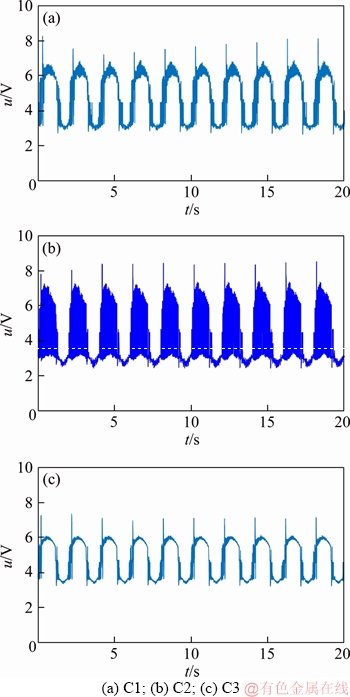
Figure 6 Control inputs of three controllers for 0.5 Hz sinusoidal trajectory motion without external load and added mass for trajectory 0.125sin(��t):
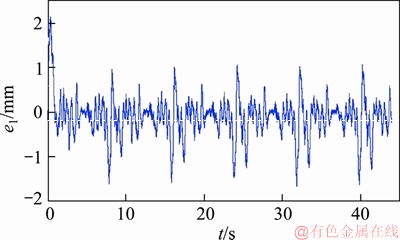
Figure 7 Tracking errors of C1 for a periodic motion trajectory (period=8 s)
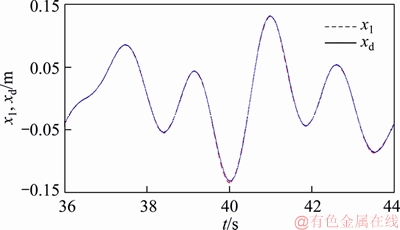
Figure 8 Steady-state tracking response of C1 for a periodic motion trajectory (period=8 s)

Figure 9 Tracking errors for a 0.5 Hz sinusoidal trajectory with external load and added mass for trajectory 0.125sin(��t):
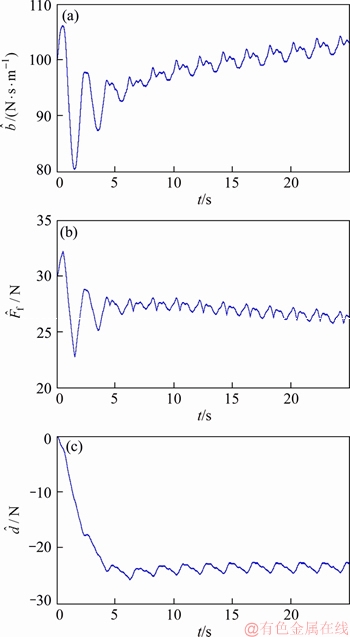
Figure 10 Parameters and disturbance estimation of proposed EDOB for 0.5 Hz sinusoidal trajectory motion with external load and added mass
It should be noted that, the disturbance estimate is about 20 N bigger than the case when there is no weight attached to the pulley, which indicates that the parameter uncertainties and disturbance could be estimated accurately by the proposed EDOB. In this case, C1 achieves almost the same steady state tracking performance as before despite the change of payload and external load force (||e1||rms and e1F of C1 are 0.77 mm and 1.53 mm), demonstrating the effectiveness of the proposed EDOB based nonlinear cascade controller.
5 Conclusions
1) An extended disturbance observer is proposed for the electro-pneumatic servo systems in which the parameter uncertainties and the influence of unmodelled dynamics and external disturbances are both estimated.
2) Based on the EDOB, a nonlinear cascade controller is developed by utilizing the backstepping method for precise position tracking control of the single-rod pneumatic actuator. The controller consists of an outer position tracking loop and an inner load pressure loop, in which the robust control law is employed to further attenuate the effects of parameter and disturbance estimation errors. The stability of the closed-loop system is ensured via the Lyapunov method, which shows that a guaranteed robust transient performance and a prescribed stead-state tracking accuracy are achieved.
3) Comparative experimental results are presented to illustrate the effectiveness of the proposed scheme. Experimental results show that the average tracking error and the final tracking error of the proposed controller are close to that of ARC, which gives us the confidence in our research. Compared to the ARC, the proposed EDOB has the merits of faster response in handling the disturbances as well as parametric uncertainties, and ease of implementation. Since the dynamic compensation type fast adaptation is no longer needed, the backstepping controller design becomes simpler. However, it should be noted that the achievable performances of the proposed controller in this paper is not better than that of ARC. There is still a lot of fundamental research has to be carried out to improve this method.
References
[1] HUANG C, CHEN J. On the implementation and control of a pneumatic power active lower-limb orthosis [J]. Mechatronics, 2013, 23(5): 505�C517. DOI: 10.1016/ j.mechatronics.2013.04.005.
[2] BONE G M, XUE M, FLETT J. Position control of hybrid pneumatic-electric actuators using discrete-valued model- predictive control [J]. Mechatronics, 2015, 25(2): 1�C10. DOI: 10.1016/j.mechatronics.2014.10.009.
[3] GIRIN A, PLESTAN F, BRUN X, GLUMINEAU A. High order sliding-mode controllers of an electropneumatic actuator: Application to an aeronautic benchmark [J]. IEEE Transactions on Control Systems Technology, 2009, 17(3): 633�C645. DOI: 10.1109/TCST.2008.2002950.
[4] RICHER E, HURMUZLU Y. A high performance pneumatic force actuator system: Part I-Nonlinear mathematical model [J]. Journal of Dynamic Systems Measurement & Control, 2001, 122(3): 416�C425. DOI: 10.1115/1.1286336.
[5] BEATER P. Pneumatic Drives [M]. Berlin: Springer, 2007.
[6] RICHARD E, SCAVARDA S. Comparison between linear and nonlinear control of an electro pneumatic servo drive [J]. Journal of Dynamic Systems Measurement & Control, 1996, 118(2): 245�C252. DOI: 10.1115/1.2802310.
[7] TAGHIZADEH M, NAJAFI F, GHAFFARI A. Multimodel PD-control of a pneumatic actuator under variable loads [J]. The International Journal of Advanced Manufacturing Technology, 2010, 48(5�C8): 655�C662. DOI: 10.1007/s00170 -009-2293-3.
[8] KHAYATI K, BIGRAS P, DESSAINT L A. LuGre model based friction compensation and positioning control for a pneumatic actuator using multi-objective output-feedback control via LMI optimization [J]. Mechatronics, 2009, 19(4): 535�C547. DOI: 10.1016/j.mechatronics.2008.12.006.
[9] XIANG F, WIKANDER J. Block-oriented approximate feedback linearization for control of pneumatic actuator systems [J]. Control Engineering Practice, 2004, 12(4): 387�C399. DOI: 10.1016/S0967-0661(03)00104-7.
[10] LEE H K, CHOI G S, CHOI G H. A study on tracking position control pneumatic actuators [J]. Mechatronics, 2002, 12(6): 813�C831. DOI: 10.1016/S0957-4158(01)00024-1.
[11] TANAKA K, YAMADA Y, SAKAMOTO M, UCHIKADO S. Model reference adaptive control with neural network for electro-pneumatic servo system [C]// Proceedings of the IEEE International Conference on Control Applications. Italy: IEEE, 1998: 1130�C1134. DOI: 10.1109/CCA.1998.721633.
[12] RICHARDSON R, PLUMMER A R, BROWN M D. Self-tuning control of a low-friction pneumatic actuator under the influence of gravity [J]. IEEE Transactions on Control Systems Technology, 2001, 9(2): 330�C334. DOI: 10.1109/87.911384.
[13] BONE G M, NING S. Experimental comparison of position tracking control algorithms for pneumatic cylinder actuators [J]. IEEE/ASME Transactions on Mechatronics, 2007, 12(5): 557�C561. DOI: 10.1109/TMECH.2007.905718.
[14] SMAOUI M, BRUN X, THOMASSET D. Systematic control of an electropneumatic system: Integrator back- stepping and sliding mode control [J]. IEEE Transactions on Control Systems Technology, 2006, 14(5): 905�C913. DOI: 10.1109/TCST.2006.880183.
[15] RAO Z, BONE G M. Nonlinear modeling and control of servo pneumatic actuators [J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 562�C569. DOI: 10.1109/ TCST.2007.912127.
[16] PLESTAN F, SHTESSEL Y, BREGEAULT V, POZNYAK A. Sliding mode control with gain adaptation-Application to an electro pneumatic actuator [J]. Control Engineering Practice, 2013, 21(5): 679�C688. DOI: 10.1016/j.conengprac.2012.04. 012.
[17] SHTESSEL Y, TALEB M, PLESTAN F. A novel adaptive- gain supertwisting sliding mode controller: Methodology and application [J]. Automatica, 2012, 48(5): 759�C769. DOI: 10.1016/j.automatica.2012.02.024.
[18] LEE L W, LI I H. Wavelet-based adaptive sliding-mode control with H�� tracking performance for pneumatic servo system position tracking control [J]. IET Control Theory and Applications, 2012, 6(11): 1699�C1714. DOI: 10.1049/iet-cta. 2011.0434.
[19] SMAOUI M, BRUN X, THOMASSET D. A study on tracking position control of an electro pneumatic system using backstepping design [J]. Control Engineering Practice, 2006, 14(8): 923�C933. DOI: 10.1016/j.conengprac.2005.05. 003.
[20] TSAI Y, HUANG A. Multiple-surface sliding controller design for pneumatic servo systems [J]. Mechatronics, 2008, 18(9): 506�C512. DOI: 10.1016/j.mechatronics.2008.03.006.
[21] LU C, HWANG Y, SHEN Y. Backstepping sliding-mode control for a pneumatic control system [J]. Proc IMechE Part I: Journal of Systems and Control Engineering, 2010, 224(6): 763�C770. DOI: 10.1243/09596518JSCE992.
[22] CARNEIRO J, ALMEIDA F. A high-accuracy trajectory following controller for pneumatic devices [J]. International Journal of Advanced Manufacturing Technology, 2012, 61(1): 253�C267. DOI: 10.1007/s00170-011-3695-6.
[23] CARNEIRO J, ALMEIDA F. Accurate motion control of a servo pneumatic system using integral sliding mode control [J]. International Journal of Advanced Manufacturing Technology, 2015, 77(9): 1533�C1548. DOI: 10.1007/s00170- 014-6518-8.
[24] MENG D, TAO G, ZHU X. Integrated direct/indirect adaptive robust motion trajectory tracking control of pneumatic cylinders [J]. International Journal of Control, 2013, 86(9): 1620�C1633. DOI: 10.1080/00207179.2013. 792002.
[25] MENG D, TAO G, LI A, LI W. Precision synchronization motion trajectory tracking control of multiple pneumatic cylinders [J]. Asian Journal of Control, 2016, 18(5): 1749�C1764. DOI: 10.1002/asjc.1269.
[26] MENG D, TAO G, LI A, LI W. Motion synchronization of dual-cylinder pneumatic servo systems with integration of adaptive robust control and cross-coupling approach [J]. Journal of Zhejiang University-Science C (Computers and Electronics), 2014, 15(8): 651�C663. DOI: 10.1631/jzus. C1300360.
[27] LI S, YANG J, CHEN W, CHEN X. Disturbance observer- based control: Methods and applications [M]. New York: Taylor and Francis, 2014.
[28] CHEN W, YANG J, GUO L, LI S. Disturbance-observer- based control and related methods-An overview [J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083�C1095. DOI: 10.1109/TIE.2015.2478397.
[29] GUO K, WEI J, TIAN Q. Nonlinear adaptive position tracking of an electro-hydraulic actuator [J]. Proc IMechE Part C: Journal of Mechanical Engineering Science, 2015, 229(17): 3252�C3265. DOI: 10.1177/0954406214568821.
[30] WOM D, KIM W, SHIN D, CHUNG C. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems [J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 787�C795. DOI: 10.1109/TCST.2014.2325895.
[31] XU Z, MA D, YAO J, ULLAH N. Feedback nonlinear robust control for hydraulic system with disturbance compensation [J]. Proc. IMechE Part I: Journal of Systems and Control Engineering, 2016, 230(9): 978�C987. DOI: 10.1177/ 0959651816661450.
[32] GUO K, WEI J, FANG J. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer [J]. Mechatronics, 2015, 27(4): 47�C56. DOI: 10.1016/j.mechatronics.2015.02.003.
[33] GUO Q, ZHANG Y, CELLER B, SU S. Backstepping control of electro-hydraulic system based on extended- state-observer with plant dynamics largely unknown [J]. IEEE Transactions on Industrial Electronics, 2016, 63(11): 6909�C6920. DOI: 10.1109/TIE.2016.2585080.
[34] GUO Q, YIN J, YU T, JIANG D. Coupled-disturbance- observer-based position tracking control for a cascade electro-hydraulic system [J]. ISA Transactions, 2017, 68(5): 367�C380. DOI: 10.1016/j.isatra.2017.02.014.
[35] PI Y, WANG X. Observer-based cascade control of a 6-DOF parallel hydraulic manipulator in joint space coordinate [J]. Mechatronics, 2010, 20(6): 648�C655. DOI: 10.1016/ j.mechatronics.2010.07.002.
[36] GUO Q, YIN J, YU T, JIANG D. Saturated adaptive control of electrohydraulic actuator with parametric uncertainty and load disturbance [J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 7930�C7941. DOI: 10.1109/ TIE.2017. 2694352.
[37] ASCHEMANN H, SCHINDELE D. Sliding-mode control of a high-speed linear axis driven by pneumatic muscle actuators [J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3855�C3864. DOI: 10.1109/TIE.2008.2003202.
[38] HUANG W, LIU C, HSU P, YEH S. Precision control and compensation of servomotors and machine tools via the disturbance observer [J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 420�C429. DOI: 10.1109/TIE.2009. 2034178.
[39] CARNEIRO J, ALMEIDA F. Reduced order thermodynamic models for servopneumatic actuator chambers [J]. Proc IMechE Part I: Journal of Systems and Control Engineering, 2006, 220(4): 301�C304. DOI: 10.1243/09596518JSCE203.
[40] MENG D, TAO G, CHEN J, BAN W. Modeling of a pneumatic system for high-accuracy position control [C]// Proceedings of the International Conference on Fluid Power and Mechatronics. China: IEEE, 2011: 505�C510. DOI: 10.1109/FPM.2011.6045817.
[41] GOODWIN G C, MAYNE D Q. A parameter estimation perspective of continuous time model reference adaptive control [J]. Automatica, 1989, 23(1): 57�C70. DOI: 10.1016/ 0005-1098(87)90118-X.
(Edited by FANG Jing-hua)
���ĵ���
������չ���Ź۲����ĵ����������Լ�������
ժҪ��Ϊʵ�ֶԵ����������˶��켣�ľ�ȷ���ƣ����������һ�ֻ�����չ���Ź۲����ķ����Լ������Ʒ�����������չ���Ź۲������Ƹ�����δ֪ģ�Ͳ�����Ϣ��ͨ��������³�����������Ʋ�������Ź�����δ��ģ��̬��Ӱ�졣�ü������������ڻ�ѹ�����ƻ�·���λ�û�·��������ɣ��ֱ���û�ģ�������۽�����ƣ�����Lyapunov����֤���˱ջ�ϵͳ���ȶ��ԡ��������������ƵĿ������ܻ�����õĹ켣���ٿ������ܣ��Ը��ź�ϵͳ�����仯���н�ǿ������³���ԡ�
�ؼ��ʣ���-���ŷ�ϵͳ����չ���Ź۲������������ƣ�³�����ƣ�λ�ø���
Foundation item: Project(51505474) supported by the National Natural Science Foundation of China; Project(2015XKMS020) supported by the Fundamental Research Funds for the Central Universities, China; Project(2016T90520) supported by the China Postdoctoral Science Foundation, Project supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions, China
Received date: 2018-06-14; Accepted date: 2018-10-23
Corresponding authors: MENG De-yuan, PhD, Associate Professor; Tel: +86-516-83590718; E-mail: tinydreams@126.com; ORCID: 0000-0003-2149-1948

