�ǵ�ģ���ǵ�ѹ����NGW�����dz���ϵ����ѧ������Ϊ
Ҷ����1, 2��������1��������1
(1. �Ͼ����պ����ѧ ����ѧԺ������ �Ͼ���210016��
2. ���տƼ���ѧ ��е����ѧԺ������ ��212003)
ժҪ�������ǵ�ģ���ǵ�ѹ����NGW�����dz���ϵ�ļ���ģ�ͣ���Ը����ֵ�ƫ�����ͳ�Ƶ�����õ����������ԭ�����������ľ���ƽ���ϵ���Ƶ�����ϵͳ�ľ���ѧ���̣��Է��̽�����Ⲣ���ģ����ѹ����ϵͳ�ľ������Խ��бȽϣ�ͬʱ������̫����(���ڳ���)ѹ���ǡ����������ϸն���֧�ŸնȶԸ�ϵͳ�������Ե�Ӱ�졣�о�����������ǵ�ģ���ǵ�ѹ�������dz���ϵ���ŽϺõľ���Ч������������Բ�������ѹ���Ǹı��������IJ�����̫���ָ���֧�Ż�����ϵͳ�ľ��������кܴ�ĸ��ƣ�ѡ�������ͬ�����dz��֡���С̫���ֺ������ֵ�֧�ŸնȾ�������ϵͳ���ء�
�ؼ��ʣ����Ǵ��������أ��ǵ�ģ���ǵ�ѹ���ǣ����
��ͼ����ţ�TH132.4 ���ױ�־�룺A ���±�ţ�1672-7207(2011)07-1960-07
Static load sharing behavior in NGW planetary gear train with unequal modulus and pressure angles
YE Fu-min1, 2, ZHU Ru-peng1, BAO He-yun1
(1. College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics,
Nanjing 210016, China;
2. School of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Abstract: An analytical model for NGW planetary gear train with unequal modulus and pressure angles was presented, and in consideration of the eccentric error and tooth-frequency error of parts, a static equation of the NGW planetary system was developed based on the theory of equivalent mesh error and the principle of static equilibrium. After equation was solved, the load sharing characteristics were compared with the normal gear transmission. Also the load sharing behavior of each planet was analyzed and compared by the sun and the ring pressure angle, the difference of the gear error, the variety of mesh stiffness and support stiffness. The analysis results show that planetary gear train with unequal modulus and pressure angles has better load sharing behavior, which does not change significantly with the different pressure angles, the floating sun gear has improved the load sharing behavior substantially, and the planets fixed with the same production batch and the lower support stiffness of the sun and the planets benefit the load sharing behavior.
Key words: planetary gear train; load sharing; unequal modulus and pressure angles; error
�ǵ�ģ���ǵ�ѹ���ǵij��ִ�����ָ���ϵ�һ�Գ������㷨����ȵ����������������ֵ�ģ����ѹ���Dz�����ȡ���Ժ��ղ�Ʒ��Ҫ����С�����С����������������Ǵ���ϵͳ��Ҫ�����������ϸ���ģ����ѹ���Ƕ�����ȵ���ƣ����������������ϸ����غ϶ȣ��ۺ���߳��ֵij�������[1]�������Ǵ���ϵͳ�У��ɶ���������γɵĹ��ʷ����������������ֿ��Թ�ͬ�ֵ��غɡ�ʵ���ϣ����������밲װƫ�����ͳ�������Ӱ�죬�غ��ڸ�·�����ϵķ�����Ѿ��ȡ���õķ������������������ĸ������ﵽ�غɷ��������Ŀ��[2-7]��20����90�����Timothy[3]��ʼ�Գ��ִ����ľ������ܿ�ʼ�����о���Kahraman��[4-5]�����dz���װ�ý����˾�̬��ѧ������ʵ�飬�ڸ�ģ���У������˳��ֵ�λ�ö�ƫ��ͳ�����½������[6]�þ�̬��ѧ�ķ�������������ϵ�и��־��ػ��������;���ϵ���Ĺ�ϵ�������о���Ԭ��[8]���о��˸���������֧�иնȶ����dz��ֹ��ʷ�����̬�����Ե�Ӱ�죻���⣬�������о���[7-15]�Ӿ���ѧ���߶���ѧ�Ƕȳ������о��˸����������������նȶ����dz��ֻ����ͳ��ֹ��ʷ��������Ե�Ӱ�졣�����о����ص���в�ͬ��������ģ��Ҳ�нϴ��𡣱�����Էǵ�ģ���ǵ�ѹ�������dz���ϵ�����dz��ֵ�ƫ�����ͳ�Ƶ�����ָ������ϸնȡ���������֧�Ÿն��Լ������ᡢ������Ťת�նȵȣ������˾���ѧƽ�ⷽ�̣���ⷽ�̲������dz���ϵͳ�ľ������ܽ��ж������ۣ�������ڳ���ϵ��ģ����ѹ�����Ƿ���ȡ�����ѹ���Ƿ����ϴ�ı������µľ���Ч�����бȽϣ��Ա�Ϊ�ǵ�ģ���ǵ�ѹ�������dz���ϵ�ľ��ػ�����ƺ�����ȷ���ṩ���ݡ�
1 ϵͳ�ĵ�Ч��ѧģ��
ͼ1��ʾΪ���Ǵ���ϵͳ�Ĵ�����ͼ������Ť��TD��̫����Z������������Zpi (i=1, 2, ��, N��NΪ�����ָ���)�������ڳ���ZI���������Ǽ�C�ϣ����͵����Ť��TL������ϵ��̫���֡����Ǽܺ������ֵ����������������£�����������Ťת����ĸ����������Դ���������ϵ����������������С�������������غɵIJ������ԡ�
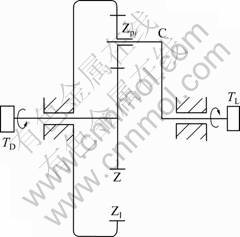
ͼ1 ���Ǵ���ϵͳ�Ĵ�����ͼ
Fig.1 Sketch map of planetary gear train
ͼ2��ʾΪϵͳ����ѧ���صļ���ģ�͡������dz���ϵ�ĸ������������壬���ü�������ģ�ͣ����Ƴ��ֲ�϶��Ħ������Ӱ�죬���������Ǽ�ת�٦�c��ת�Ķ�����ϵ�����ϸ�����ת����֧�д��ĵ��Ա����õ�Ч���ɸնȱ�ʾ�����У�KspΪ̫���ֺ������ּ�ĵ�Ч���ϸնȣ�KpIΪ�����ֺ��ڳ��ּ�ĵ�Ч���ϸնȣ�Ks��Kc��Kp�ֱ�Ϊ̫���֣����Ǽܺ�������֧�д���֧�Ÿնȡ����ָ������ϸն���GB 3480��97���м��㣬֧�Ÿն�������[16]�������������㡣
��ϵͳ����(8+3N)�����ɶȣ���������Ϊ��
 (1)
(1)
ʽ�У�xs��Hs��Vs�ֱ�Ϊ̫�����������߷������ĺ������������λ�ƣ�xpi��Hpi��Vpi�ֱ�Ϊ��i���������������߷������ľ������������λ�ƣ�xc��Hc��Vc�ֱ�Ϊ���Ǽܵ��������ĺ������������λ�ƣ�xD��xL�ֱ�Ϊ����������ĵ�Чλ�ƣ��ڳ��̶ֹ����ʲ����������λ�ơ�
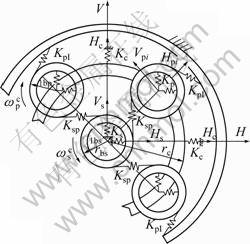
ͼ2 ϵͳ�ľ���ѧ���ؼ���ģ��
Fig.2 Static analysis model of planetary gear train
2 ϵͳ�����ϽǼ���
�ǵ�ģ���ǵ�ѹ���dz��ָ�����ʹ�ڲ���λ������£����ǵķֶ�ԲҲ�Dz����еģ���ʱ�����ϽDz������κ�һ������ѹ���ǡ����Ƶ�����λʱ�ij��ָ���϶���Ϸ���ʽ��
 (2)
(2)
ʽ�У� Ϊ�����ߺ�����
Ϊ�����ߺ����� ��
�� Ϊ���Ͻǣ�x1��x2Ϊ�öԳ��ֵı�λϵ����
Ϊ���Ͻǣ�x1��x2Ϊ�öԳ��ֵı�λϵ���� ��
�� Ϊ�öԳ��ֵ�ѹ���ǣ�z1��z2Ϊ�öԳ��ֵij�������
Ϊ�öԳ��ֵ�ѹ���ǣ�z1��z2Ϊ�öԳ��ֵij������� �����������ϸ������C�����������ϸ���
�����������ϸ������C�����������ϸ���
�������dz���ϵͳ�����ֵı�λϵ����ѹ���Ǻͳ����ֱ�Ϊxj�� ��zj (j��Ӧs, pi, I���ֱ��ʾ̫���֡������ֺ��ڳ���)����ʽ(2)���Լ���������dz���ϵ���������ϵ�ʵ�����Ͻ�
��zj (j��Ӧs, pi, I���ֱ��ʾ̫���֡������ֺ��ڳ���)����ʽ(2)���Լ���������dz���ϵ���������ϵ�ʵ�����Ͻ� ��
�� ��
��
3 ϵͳ��������ȷ��
���ָ���ת��ʱ�������������ϵ��������ɸ��������������ϵ����λ�ƺ����ϸն�ȷ���������������λ���ɸ��������ĺ���(����)λ��������(������)λ�Ƶĵ�Чλ�ơ����������ĵ�Чλ�ơ������������ϵ����ת��λ�ƶ����ɡ�
����������������������λ�Ƶı仯�����Ը����������ƶ�ʱ�������Ͻǵ�С�仯����������������λ��ͶӰ���������ϡ������ϵļ��ι�ϵ��̫���ֺ������ָ�������������������ϵIJ�϶�ı��� ��
�� ��
��
 (3)
(3)
ʽ�У� Ϊ�������ֵ�λ�ýǣ�
Ϊ�������ֵ�λ�ýǣ� �� i=1, 2, ��, N��
�� i=1, 2, ��, N��
������ƫ�����ļ��������������߷����ϵ�λ�Ƽ������轫��ͶӰ�������߷����ϡ������������ܶ࣬Ϊ�����о������Ľ��м�������Ϊ���Ǽܰ�װ������ƫ������������̫���ֺ��ڳ��ֵ�ƫ������У�ֻ�迼�Ǹ������ֵ�ƫ�����Ӱ�켴�ɣ���ֵ�������Ȧ�ľ������������һ������ʾ�����ִ����ij�Ƶ�����ó���ƫ������ʾ[15]�����ǣ������������ϲ����ĵ����ۼ�������� ��
�� �ֱ�Ϊ��
�ֱ�Ϊ��
 (4)
(4)
ʽ�У� ��
�� �ֱ�Ϊ�ڡ������ϸ��ij�Ƶ��
�ֱ�Ϊ�ڡ������ϸ��ij�Ƶ�� ��
�� �����
����� ��
�� ��
�� �ֱ�Ϊ�����ֵ�ƫ����
�ֱ�Ϊ�����ֵ�ƫ���� ��
�� ��
�� �����
Ϊ����λ�� Ϊ������ϵ�����ϳ�Ƶ��
Ϊ������ϵ�����ϳ�Ƶ�� Ϊ��������������Ǽܵ�ת��(jΪs, pi, I)��tΪʱ�䡣
Ϊ��������������Ǽܵ�ת��(jΪs, pi, I)��tΪʱ�䡣
���Ǵ�������ת��λ������ij��ָ����������߷�������λ�� ��
�� �ֱ�Ϊ��
�ֱ�Ϊ��
 (5)
(5)
����ʽ(3)~(5)�������������ϵ������� ��
�� ��
��
 (6)
(6)
����i=1, 2, ��, N��
4 ���ص���ѧ���������
ѡ����ʵ�����ϵ������ϵͳ�ľ���ƽ�ⷽ���飺
 (7)
(7)
ʽ�У�KD��KL�ֱ�Ϊ�������̫����֮�������������Ǽ�֮�����Ťת�նȣ�rbs��rbc�ֱ�Ϊ̫���ֵĻ�Բ�뾶�����Ǽܵĵ�Ч��Բ�뾶��FD��FL�ֱ�Ϊ����ת�غ���ת�صĵ�Ч����FD=TD/rbs��FL=TL/rbc��
��ⷽ����(7)�õ���������X��ֵ������ʽ(3)~(6)��������ָ��������� ��
�� ������ʽ(8)�õ���i(i=1, 2, ��, N)�������ֵľ���ϵ��
������ʽ(8)�õ���i(i=1, 2, ��, N)�������ֵľ���ϵ�� Ϊ��
��
 (8)
(8)
���������־���ϵ�������ֵΪϵͳ�ľ���ϵ������ ��
��
5 ����Ӱ�����
ij���dz��ּ������Ĺ���Ϊ250 kW��������ת��Ϊ12 000 r/min�������ָ���Ϊ3�����÷ǵ�ģ���ǵ�ѹ���ǽṹ��ϵͳ��Ҫ�������1��ʾ��
��1 ϵͳ����Ҫ����
Table 1 Primary data of planetary gear train

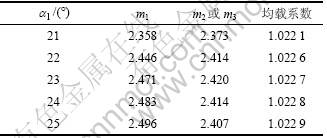
��ʱ�ķֶ�Բ�ݿ�ϵ��Ϊ0.12��������������ϸն�KpI��Ksp�ֱ�Ϊ1.718��108 ��4.026��108 N/m��̫���ֺ������ֵ�֧�иն�Ks��Kp�ֱ�Ϊ7.887��107��4.095��107 N/m���������������Ťת�ն�KD��KL�ֱ�Ϊ5.26��105��7.46��105 N?m/rad�����Ǽ�֧�иն�KcΪ1.119��108 N/m�������ֵľ��ȵȼ���Ϊ5�����ɳ��ֱ������Ӧ�����㣬������2��ʾ�������λ���������������ø������ֵľ���������ͼ3(a)��ʾ��ϵͳ�ľ���ϵ��Ϊ1.022 1��
��2 ƫ��������Ƶ���
Table 2 Values of eccentric error and tooth-frequency error ��m

5.1 ���ģ����ѹ���Ǿ��صıȽ�
������ͬŤ�������£����õ�ģ����ѹ���ǵ�ԭ��ƣ�̫���֡������ֺ��ڳ��ֵij����ֱ�Ϊ20��40��100��ģ��Ϊ2.4��ѹ����Ϊ20�㣬�ݿ�ϵ����ǰ�����ͬ�����¼������ϸնȡ�֧�ŸնȺ�Ťת�նȵȡ����־��ȼ������������ǰ�����ͬ������ø������ֵľ���������ͼ3(b)��ʾ��ϵͳ�ľ���ϵ��Ϊ1.024 5���������ڳ�����ģ����ѹ���ǵȵĸı䣬����λ�����������ϵķ��������˱仯�������������ϵ������������ϵ��������֮�����ı䡣������߱�ǰ�߾���ϵ���������ʲ��÷ǵ�ģ���ǵ�ѹ���ǵ�������ƣ����������������ϵͳ�����Сʱ������Ч���������ơ�
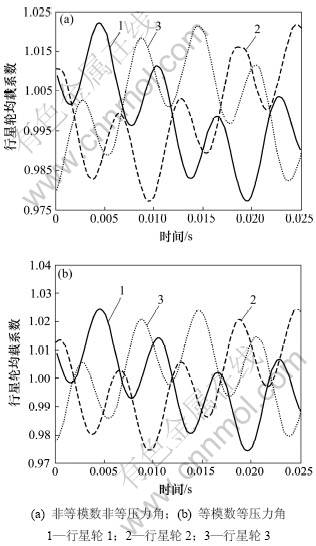
ͼ3 ����ͬ�����µľ���ϵ��
Fig.3 Coefficient of load sharing under errors
5.2 �ֶ�Բѹ���ǶԾ��ص�Ӱ��
�о��ǵ�ģ���ǵ�ѹ�������dz���ϵ��ѹ���ǶԾ���ϵ����Ӱ�졣Ϊ���ڱȽϣ���Ƴ�����ͬŤ�أ����ֳݿ�ϵ����ͬ��ͬʱ�����ֵij������䡣(1) ��������������ϲ��ȣ���̫����ѹ��������������ͬ����Ϊ20�㣬�ڳ���ѹ���� �ֱ���21��~25��֮��仯�����3��ʾ��(2) �����ϲ�����������ȣ���������ѹ�������ڳ�����ͬ����Ϊ20�㣬̫����ѹ�����ֱ���21��~25��֮��仯�����4��ʾ��
�ֱ���21��~25��֮��仯�����3��ʾ��(2) �����ϲ�����������ȣ���������ѹ�������ڳ�����ͬ����Ϊ20�㣬̫����ѹ�����ֱ���21��~25��֮��仯�����4��ʾ��
ѹ���DZ仯ʱ��ģ��Ҳ��֮�仯������ϵ�����3�ͱ�4��ʾ���ɴ˿ɼ������÷ǵ�ģ���ǵ�ѹ���ǵ���ƣ���ʹѹ���DZ仯���ȴ�(������֤��ѹ���Ƿ�ΧΪ21��~25�㣬��������������������������ĸ���ѹ���Ƿ�Χ������δ�г�)������ϵ���ı仯��С����˸������������Сϵͳ�����ͬʱ������Ч��������Ϊѹ���ǵĸı���仵��
��3 ��ͬ�ڳ���ѹ�����µľ���ϵ��
Table 3 Coefficient of load sharing under different pressure angles of ring gear
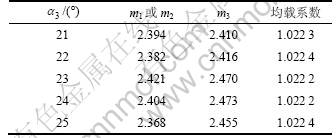
��4 ��̫ͬ����ѹ�����µľ���ϵ��
Table 4 Coefficient of load sharing under different pressure angles of sun gear
5.3 ����ƫ�����Ծ��ص�Ӱ��
�о����������Ծ���ϵ����Ӱ�죬Ϊ�˱��ڱȽϣ��ı䱻�о��������Ϊ6 ?m��ͬʱ���ֱ�1���������䣬ͼ4(a)~(c)��ʾΪ��ƫ���������ʱ�������ֵľ������ߡ���ͼ4�ɼ���̫���ֵ�ƫ�����Ծ���Ӱ������ڳ��ִ�֮����������С����ʱϵͳ�ľ���ϵ���ֱ�Ϊ1.032 6��1.030 6��1.025 6������̫��������С�����ҲС��̫���ָ������ڳ��ָ������㣬Ӧ��Ҳ��Ϊ�㷺����Ҫʱ��ѡ���ڳ��ָ����Ļ���[2]��
�о���������ƫ�����������ͬʱϵͳ����ϵ���ı仯��Ϊ��ͼ4(c)�Ƚϣ��ı�������ƫ�����ֱ�Ϊ6��3��3 ?m������ϵ��Ϊ1.031 8(��Ƶ�������ʱû����ͼ)����ͼ4(d)��ʾ����ˣ���ϵͳ����װ��ʱ��Ӧ�����ܱ�֤��������������ͬ���������ڴ���ϵͳ�ľ���Ч����
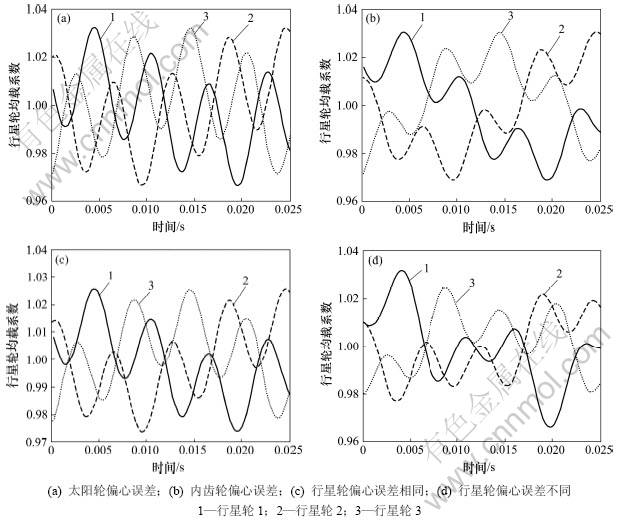
ͼ4 ��ͬ�������ľ���ϵ��
Fig.4 Coefficient of load sharing under different eccentric errors
5.4 �նȶԾ��ص�Ӱ��
����̫���֡������־��нϴ�ĸ�����������Ч���Ϻã��������ϵ����ϸնȱ仯�Ծ���Ч��Ӱ�첻������̫���ֺ�������֧�Ÿն�����ϵͳ����Ч�������5�ͱ�6��ʾ������[12]ͨ�����ֵĸ�����������̫����֧�Ÿն�����صĹ�ϵ�������뱾�о����һ�¡���ˣ��ڲ���̫���ֺ�������ʱ��Ӧ�����������Բ��ã�����̫��������������������˫����������[2]�����Ǽ�֧�ŸնȺ������������Ťת�ն�Ӱ�����������˵Ķ���ź�ϣ����Ծ���Ч��Ӱ�첻��
��5 ̫����֧�Ÿն������ϵ��
Table 5 Coefficient of load sharing and sun support stiffness

��6 ������֧�Ÿն������ϵ��
Table 6 Coefficient of load sharing and planets support stiffness

6 ����
(1) �����˷ǵ�ģ���ǵ�ѹ����NGW�����dz���ϵ�ļ���ģ�ͺ;���ѧ���̣��Է��̽�����Ⲣ���ģ����ѹ���dz���ϵ�ľ���Ч�������˱Ƚϣ�������ѹ���ǡ����������ϸն���֧�ŸնȶԸ�ϵͳ�������Ե�Ӱ�졣
(2) �ǵ�ģ���ǵ�ѹ�������dz���ϵ��������ģ����ѹ���dz���ϵ��ȣ���������С������������ߵ�ͬʱ������Ч�������������ƣ���Ϊ�ó���ϵ�ں��ղ�Ʒ�ϵ�Ӧ���ṩ������֧�֡�
(3) �ǵ�ģ���ǵ�ѹ�������dz���ϵ�����ʱ�����ϳ���ѹ���ǿ��ܲ���ȣ����нϴ�ı仯���ȣ����ĸı���ھ���Ӱ�첻�������Բ�������ѹ���Ǹı�������ϴ�IJ�����
(4) ̫���ֺ��ڳ��ֵĸ�����ϵͳ�ľ�������Ӱ��ϴ�С̫���ֺ�������֧�ŸնȾ�������ϵͳ�ľ��ء�
(5) ����ϵͳ����װ��ʱ��ѡ����ͬ�������dz��֣����ϵͳ�ľ���Ч�����ԣ���ʵ�������У�����ѡ��ͬһ���ε����dz��֣��Ա�֤����һ���ԡ�
�ο����ף�
[1] Seiso S. ��λ����[M]. �Ϻ�: �Ϻ���ѧ����������, 1984: 244-254.
Seiso S. Proile shifted gear[M]. Shanghai: Shanghai Science and Technology Press, 1984: 244-254.
[2] �����. ���dz��ִ������[M]. ����: ��ѧ��ҵ������, 2003: 181-190.
RAO Zhen-gang. Design of planet gear train[M]. Beijing: Chemical Industry Press, 2003: 181-190.
[3] Timothy L K. A method to analyze and optimize the load sharing of split path transmissions[R]. NASA Technical Memorandum, 1996: 1-18.
[4] Kahraman A. Static load sharing characteristics of transmission planetary gear sets: Model and experiment[J]. Society of Automotive Engineers, 1999(1): 1954-1963.
[5] Kahraman A. Load sharing characteristics of planetary transmissions[J]. Mechanism and Machine Theory, 1994, 29(8): l151-1165.
[6] ½����, ���, ������. ���dz��ִ�������ѧ���ط���[J]. ��е��ѧ�뼼��, 2005, 24(6): 702-704.
LU Jun-hua, LI Bin, ZHU Ru-peng. Analysis of static load sharing in planetary gearing[J]. Mechanical Science and Technology, 2005, 24(6): 702-704.
[7] Ԭ��, ������, ������. ���dz��ִ����Ĺ��ʷ�����̬�����Ż����[J]. ���ն���ѧ��, 2000, 15(4): 410-412.
YUAN Ru, WANG San-min, SHEN Yun-wen. Dynamic optimum design of power shared out equally among the planetary gears[J]. Journal of Aerospace Power, 2000, 15(4): 4l0-412.
[8] �´�. ���dz��ִ������ع��������ļ���[J]. ��е���������, 2001, 6(3): 52-53.
CHEN Chun. Calculation on the offset of floating component in planetary transmission[J]. Machinery Design & Manufacture, 2001, 6(3): 52-53.
[9] Ԭ����, ������, ���Ա�, ��. �������ͳ��ִ�������ѧ���ط���[J]. ��е��ѧ�뼼��, 2004, 23(7): 789-792.
YUAN Qing-yu, ZHU Ru-peng, ZHU Zi-bing, et al. Analysis of static load sharing in a 2-stage star gear system[J]. Mechanical Science and Technology, 2004, 23(7): 789-792.
[10] Ԭ����. ���ͳ��ִ���ϵͳ���ط����������о�[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2004: 6-23.
YUAN Qing-yu. The methodology of analyzing load sharing characteristics of split path star type gear train[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2004: 6-23.
[11] ������, ������. �������ͳ��ִ�������ѧϵͳ����������������������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(3): 553-557.
BAO He-yun, ZHU Ru-peng. Floating displacement static analysis of basic floating part of 2-stage star gear train[J]. Journal of Central South University: Science and Technology, 2006, 37(3): 553-557.
[12] ½����, ������, ���㻢. ���ڷ�������Ҫ������Ǵ���������������������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(1): 143-148.
LU Jun-hua, ZHU Ru-peng, JIN Guang-hu. Basic components�� offset analysis of planetary gearing in need of loading sharing[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 143-148.
[13] ½����, ������, ���㻢. ���Ǵ�����̬�������Է���[J]. ��е����ѧ��, 2009, 45(5): 85-90.
LU Jun-hua, ZHU Ru-peng, JIN Guang-hu. Analysis of dynamic load sharing behavior in planetary gearing[J]. Journal of Mechanical Engineering, 2009, 45(5): 85-90.
[14] ���ڵ�, ������, ����. 2K-H���Ǽ������Ķ�̬����[J]. ������ҵ��ѧѧ��, 1990, 10(4): 361-371.
FANG Zong-de, SHEN Yun-wen, HUANG Zhen-dong. Dynamic characteristics of 2K-H planetary gearing[J]. Journal of Northwestern Polytechnical University, 1990, 10(4): 361-371.
[15] ������. ���ʷ������ִ���ϵͳ�����Զ���ѧ�о�[D]. ����: ������ҵ��ѧ��еϵ, 2001: 119-137.
SUN Zhi-min. Research on nonlinear dynamic of split-power gear system[D]. Xi��an: Northwestern Polytechnical University. Department of Mechanical Engineering, 2001: 119-137.
[16] ������. ������ѧ[M]. ����: �ߵȽ���������, 2004: 176-197.
LIU Hong-wen. Mechanics of material[M]. Beijing: Higher Education Press, 2004: 176-197.
(�༭ �°���)
�ո����ڣ�2010-05-10�������ڣ�2010-08-21
������Ŀ��������Ȼ��ѧ����������Ŀ(50775108)�����տƼ����»���������Ŀ(08B52004)
ͨ�����ߣ�������(1959-)���У����ս����ˣ����ڣ���ʿ����ʦ�����»�е�������ṹǿ�ȡ���еCAD���Զ����о����绰��025-84892500��E-mail: yfmcn@hotmail.com

